【show】一款高边型BUCK电路制作
看老梁版主发的贴低边型BUCK驱动做的确实不错。这个SHOW的活动小弟虽然学艺不精也想参加活动凑个热闹就山寨老梁的帖子吧,为免投诉侵权咱将低改成高,可以不 ?
全部回复(69)
正序查看
倒序查看
现在还没有回复呢,说说你的想法
 小老梁
小老梁
@zhenxiang
说下开发背景;应用在一输入电压极不稳定的场合,输入最低180VAC最高短时能到600VAC,后面配置220VAC输入标准工业电源的设备时有电源损坏。故设计一款降压电源将输入电压稳定降至220DC左右,然后为设备供电。
设计思路;这个东西只是作为过渡产品,所以对他的要求就是好用。不坏,便宜。
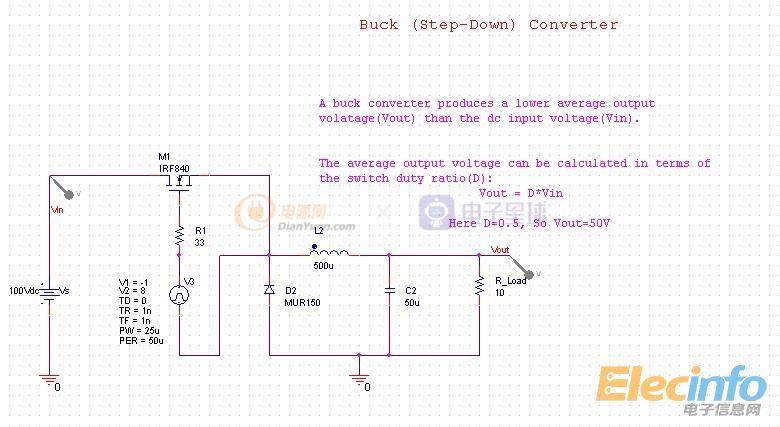
预期输入电压最低240VDC 最高840VDC 输出设定在200VDC吧 否则占空比太大。
这样连续模式下DMAX=0.833 DMIN=0.238
最大占空比超过0.5,而且要设计工作到CCM,那么采用电流模式控制自然会有次谐波震荡的问题还需要斜坡补偿。为图简单干脆用电压模式的IC省去这个烦恼。那就是TL494了便宜好买,资料也多。呵呵
0
回复
提示
@zhenxiang
设计思路;这个东西只是作为过渡产品,所以对他的要求就是好用。不坏,便宜。预期输入电压最低240VDC 最高840VDC输出设定在200VDC吧否则占空比太大。这样连续模式下DMAX=0.833 DMIN=0.238 最大占空比超过0.5,而且要设计工作到CCM,那么采用电流模式控制自然会有次谐波震荡的问题还需要斜坡补偿。为图简单干脆用电压模式的IC省去这个烦恼。那就是TL494了便宜好买,资料也多。呵呵
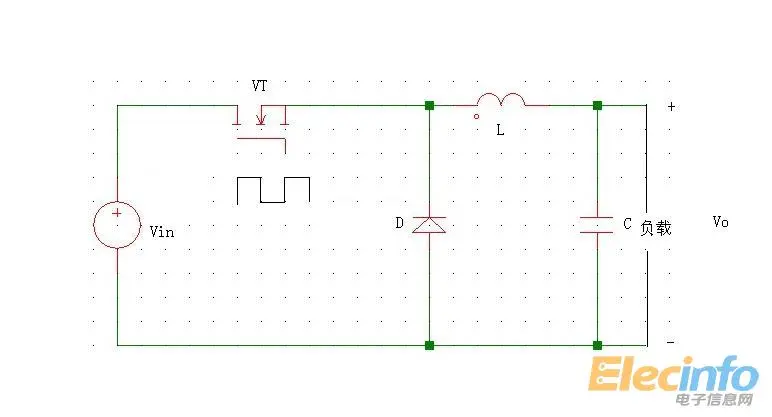
我的理解低边高边的区别就是MOS放的位置。标准教科书上的BUCK 都应该算是高边的因为MOS接在输入正。低边那就是MOS接在输入负吧.
0
回复
提示