
上次拆解了一个硬币收集机器人
见贴http://www.dianyuan.com/bbs/2424282.html
这次打算在这个壳上进行DIY一个语音识别控制的机器人,加个底盘让它可以跑起来。。。。。
后贴继续更新,欢迎围观指导。。。。。
上次拆解了一个硬币收集机器人
见贴http://www.dianyuan.com/bbs/2424282.html
这次打算在这个壳上进行DIY一个语音识别控制的机器人,加个底盘让它可以跑起来。。。。。
后贴继续更新,欢迎围观指导。。。。。
语音识别的模块到手,今天测试了一下语音识别模块的功能,识别还行,,,
一天下来熟悉识别模块,把模块+驱动模块+小车底盘=测试原型机,经过几次调试,今天终于可以拍个视频发上来,比较粗糙 ,大家别见笑。。。。
,大家别见笑。。。。
发现视频传不上去 ,只能发两张相片上去解解馋了
,只能发两张相片上去解解馋了 。。。
。。。
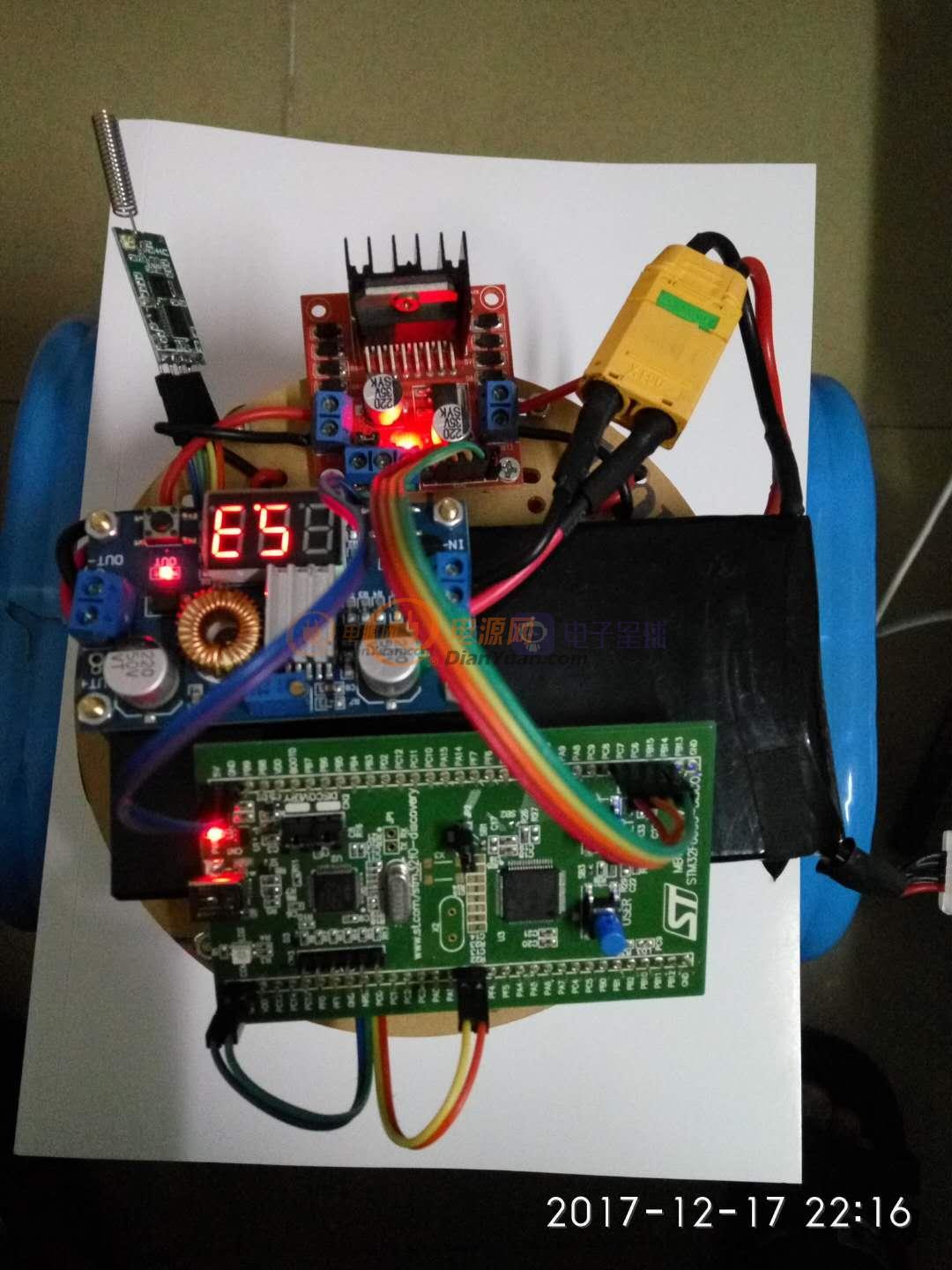
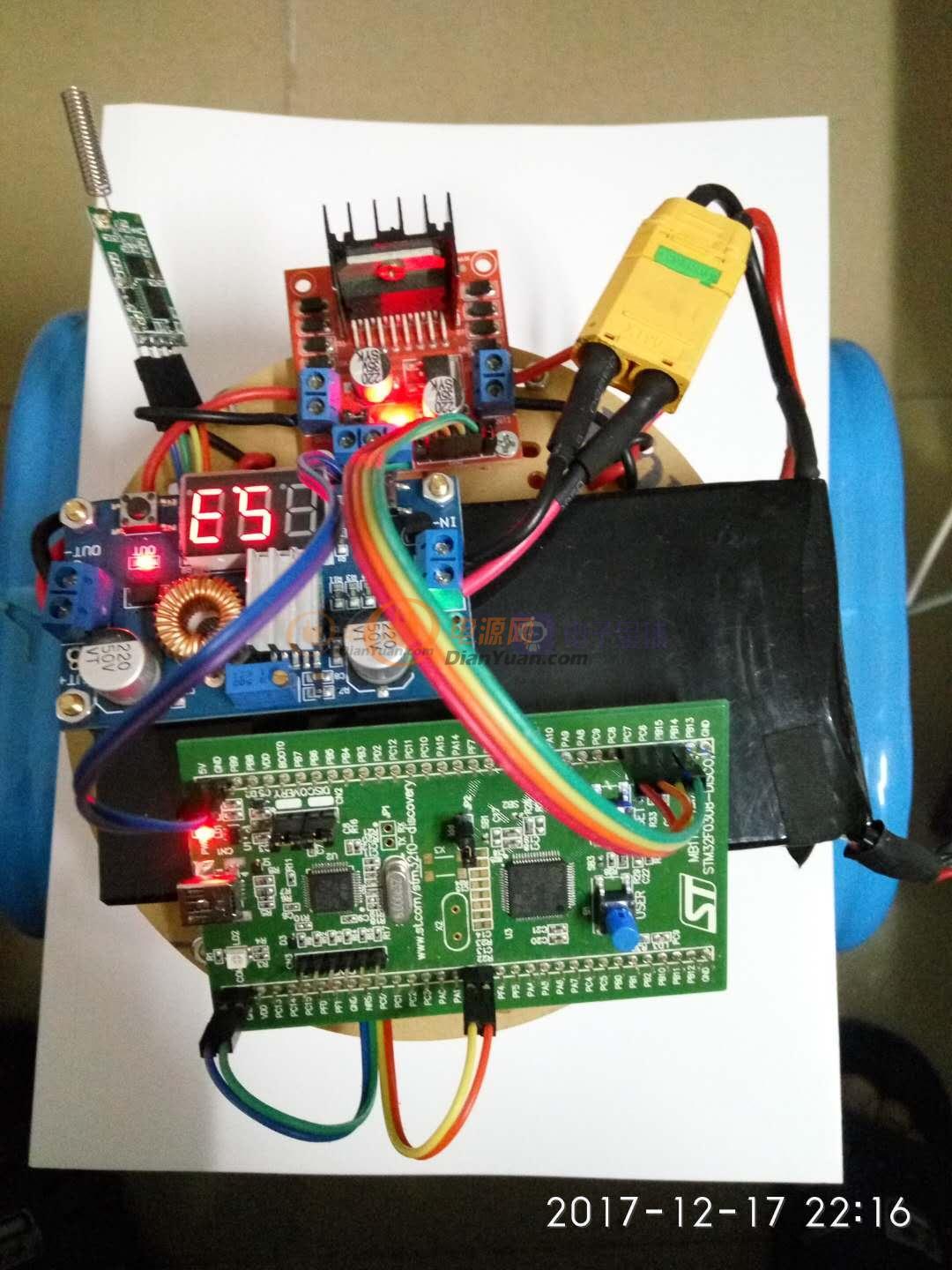
测试小车模样,功能测试语音识别模块并不是最终的,最终是一个机器人 。
。
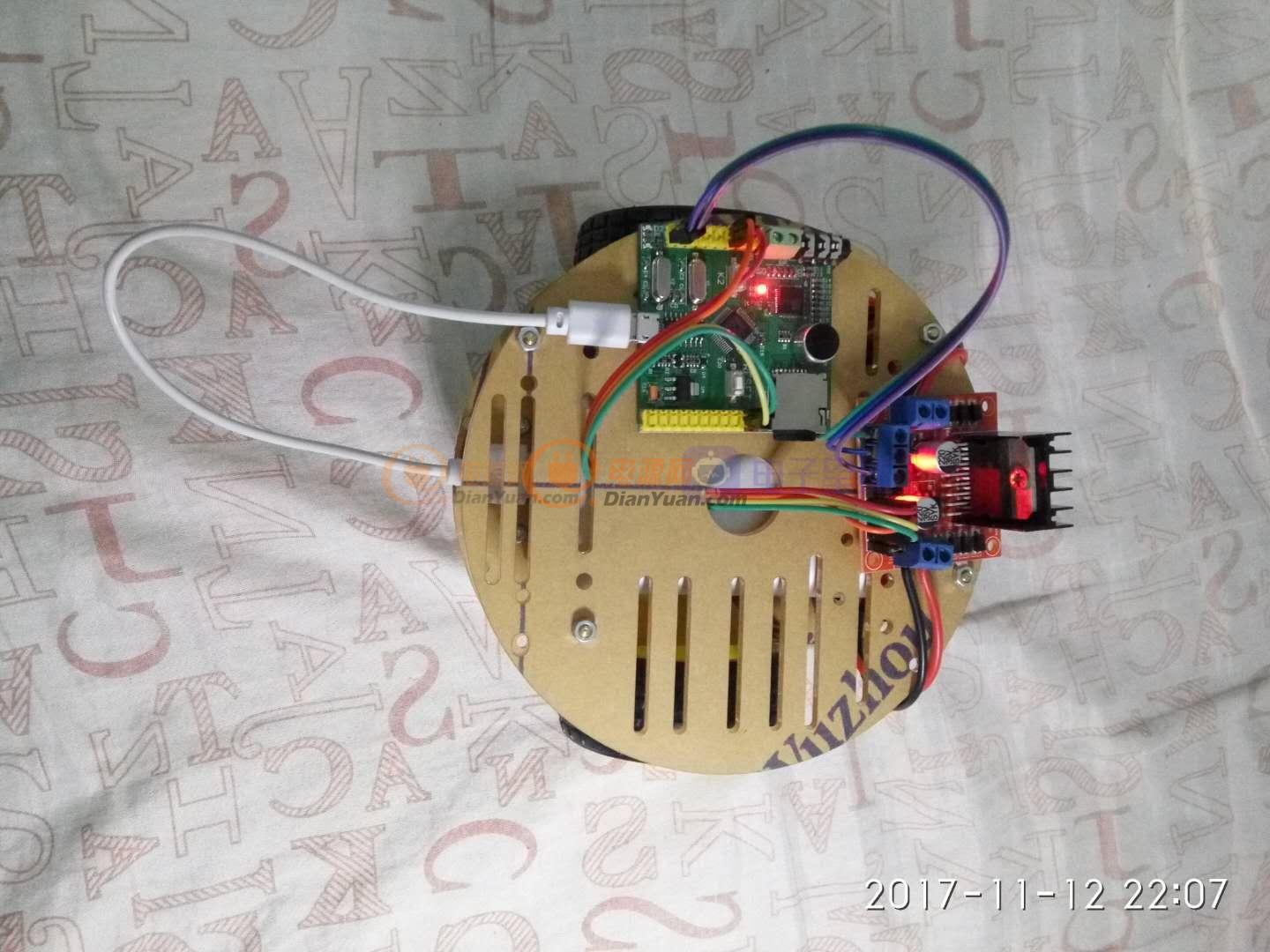
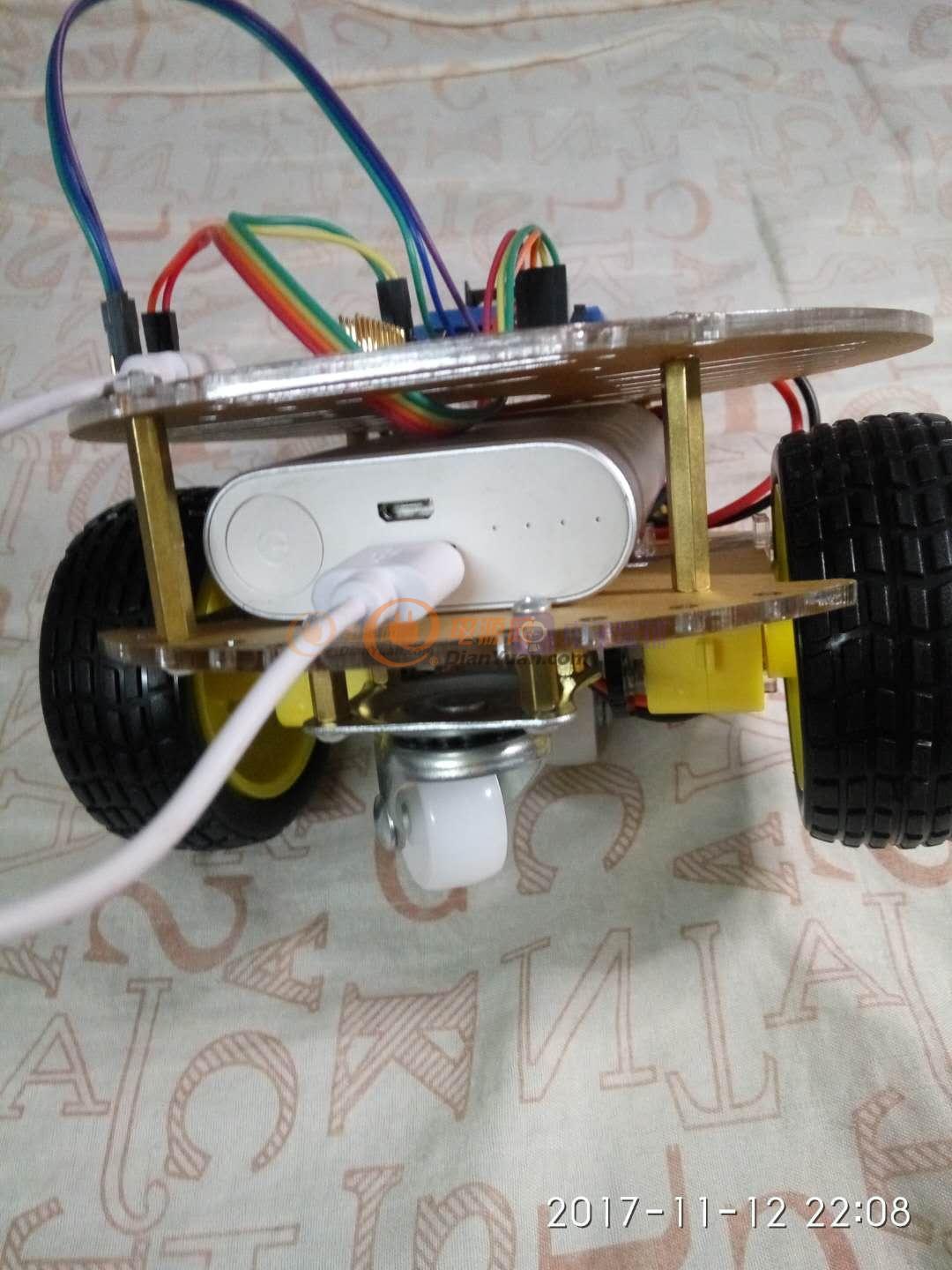
小米充电宝充当电源,效果杠杠的,,O(∩_∩)O哈哈~
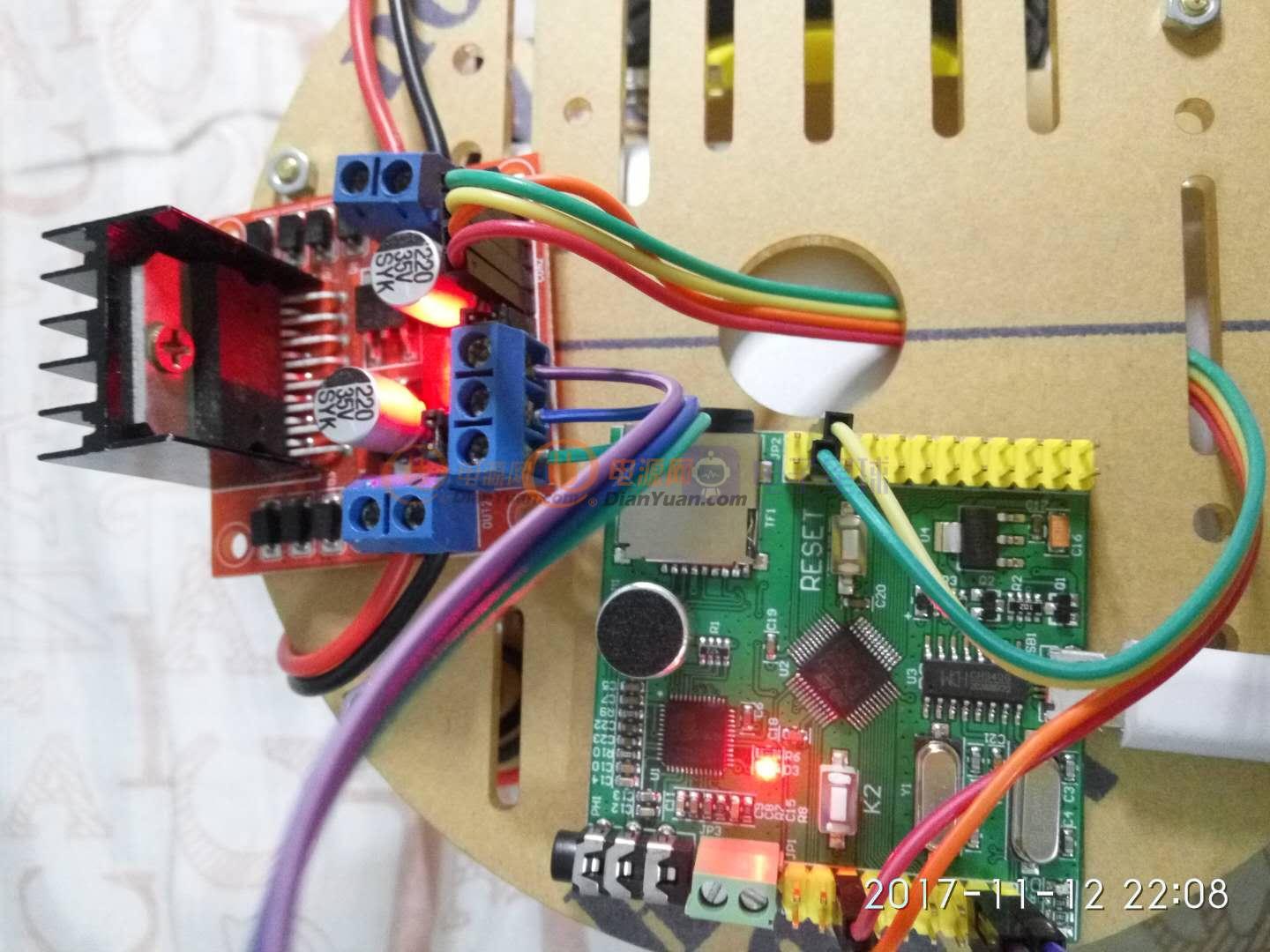
电机驱动模块。最终会集成到一个板上,,,,
测试总结,识别率有待提高,小车只用两个轮子驱动,另外两个是万向轮,前进,后退的方向都不确定,稳定性不高,下次使用四轮或者修改万向轮为带舵机的被动轮子,,,,,
自己录制的小视频,分享给大家:
后续待更新,,,,,,
前面都发了不少测试的视频图片,现在发些原理类的东西吧,,,
下面是这个语言识别控制小车的原理框图,分两部分
一部分是手持的语音识别部分,主要有语音识别芯片LD3220与STM32F103组成,识别到命令后通过RF433无线通信模块进行无线传输,此部分是使用小米充电宝进行供电,,,
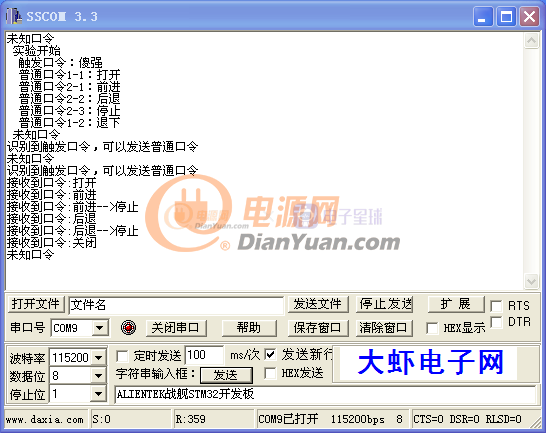
第二部分是在小车上或者说在机器人上,主要有STM32F030加L298N电机驱动模块组成,接收指令使用hc-11的433Mhz的无线通信模块进行接收,电机可以控制做一下动作:
前进(左右轮都正转)
后退(左右轮都反转)
左转(左轮停止,右轮正转)
右转(左轮正转,右轮停止)
停止(左右轮停止)
此部分供电是使用4S的锂电池组再使用5A的DC-DC 降压模块,最开始还是使用小米电池供电,但是在电机转动的时候电压被拉低了,HC-11模块在收发时候收到影响,有时候会接受不到指令,所以最后改为使用电池组供电,,,,,

大家是否注意到了两个控制芯片一个是F103,一个是F030两个系列的芯片,在代码上两个芯片进行切换之间还得多多修炼。。。。

最下面黑色的是电池组,最上面的是DCDC模块,最前面的是L298N电机控制模块,前左边是433Mhz RF模块,上面最后的蓝色是STM32F303-discovery开发板,主要是否控制,最下方就是圆形的小车咯。

后期更新调试的bug以及修改办法,,,,
先说说,RF 433Mhz无线模块调试吧,,,,
#
一开始是使用LD3220语音识别模块在小车上,但是由于小车运动起来噪声很大,主要是电机出来的减速机声音很大,再有就是叫口令的时候要跟着小车跑,所以就打算这使用无线模块进行传输指令
一看公司上次做实验还剩下有几个无线模块,HC-12 433Mhz RF模块。所以就拿来测试一下,
@
@
######################################囧途一###################################
没看规格书,只知道可以透传,往串口送数据就可以传输出去,所以就把收发都挂在一个stm32开发板上,最近距离进行测试,以为这样就不会有其他的因素影响了,只需要测试程序OK就可以收到数据,但是折腾了两个晚上,一点进展都没有
???为啥???
再去公司问了一下上次使用的同事,他也不知道,只给我一个购买的淘宝地址,好吧,哥自己动手丰衣足食,,,,,,
上去一看,傻眼了,人家要求使用距离是1-400米。也就是最小的通信距离不能小于1m。

大悟,就弄了一条USB延长线,再买了一个USB转串口TTL小模块。
一端接电脑,一端接到开发板上,开发板程序不停发送数据,使用中断进行接收,,,,,
@
@
######################################囧途二###################################
到上面的时候,电脑使用的串口调试工具是可以接收到开发板发过来的数据,但是问题又来了
@
@
接收没问题,但是我从串口已发送数据,串口就死掉,而且再也收不到数据了,,,,,
一直没搞懂是什么问题???? 难道是开发板的接收中断处理有问题吗?
难道是开发板的接收中断处理有问题吗?
再回头,直接把开发板的串口1和串口3的Tx1接到RX3中,接收处理中断也正常啊,但是为啥一接上无线模块就不行呢?
伤脑筋啊,
问度娘啊,
问同事啊,
折腾 啊,,
最后怀疑是不是供电不足啊,USB转232的模块输出的3.3V供电管脚是不是供电不足,在发送数据的时候导致RF模块重启了,,,,,,
果断换掉3.3V,直接转接5V。(USB输出5V的能力为0.5A)这次应该没问题了吧,接上去,收正常,发,关键时刻马上就要到了,
能好吗?
期待吗?
进中断了,灯亮了,
收到中断回馈的数据了,
我CNM的,容我骂句粗口,折腾了这么久,居然是USB转232的3.3V供电不足。。。。。。
¥¥¥¥¥¥¥¥¥
打下这两个拦路虎以后,后面的无线调试就基本很顺利了,也没有太大的问题咯。。。。
发两个图,看看


下图是HC-12 无线模块的产品规格书

 顶帖顶帖
顶帖顶帖







