随着激光打标机应用范围的不断扩大,对激光打标的速度和精度要求也越来越高。TI(德州仪器)公司的TMS320F2812DSP,是专门为工业控制应用而设计的高速处理器,应用其来开发激光打标控制器具有实际意义,文中设计的激光打标控制器应用前景广阔。
1 控制器的工作原理
振镜式激光打标控制器上位机是安装了打标软件的计算机,文字和图形通过图像处理成大量的打标数据,并在打标软件界面上显示出效果图。打标数据由USB总线传输到扩展存储器RAM上,再由DSP按顺序取出送入到D/A转换芯片中,D/A芯片转换后输出-5~5 V的模拟电压驱动扫描振镜和控制激光电源的功率,并由一路GPIO(通用输入/输出)引脚控制激光能量的开关,x、y轴振镜控制激光焦点在二维平面上有序移动来完成各种形式的文字、图形打标。
2 振镜式激光打标控制器的硬件电路设计
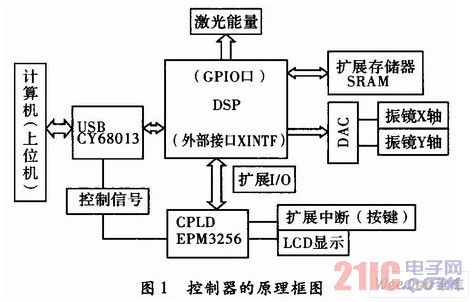
系统的原理框图如图1所示。振镜式激光打标控制器主要有USB通讯电路、扩展存储器电路、D/A转换电路和CPLD电路。
2.1 USB通讯接口
USB通讯模块采用Cypress公司的CY7C68013,USB与DSP的连接方法有FIFO和GPIF两种,在本系统中采用了FIFO方式,读写信号由CPLD和DSP提供。USB芯片的SLOE连接到DSP的外部中断,其他控制信号由DSP通过CPLD译码后与USB芯片连接,DSP的数据线和两路地址线直接与USB相连。
2.2 高速D/A转换电路
数模转换部分为控制器的关键部分。本系统中需要三路D/A,分别控制振镜x轴和振镜y轴以及激光功率。对于本系统AD7836的主要技术参数都符合要求:
(1)单片4路14位D/A转换;(2)电压输出,最大电压输出范围是±10 V;(3)输出电压的建立时间典型值为16 μs。
D/A电压分辨率为:5 V/213=O.61 mV。双极性和单极性电压输出相比电路省去了改变电压极性的运算放大器,使电路得到简化。
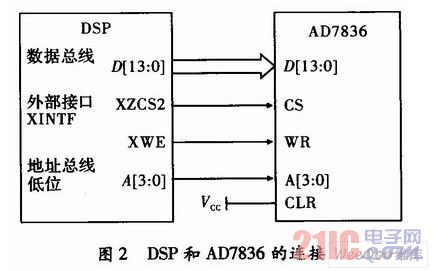
Ad7836支持与16位以上微处理器和DSP的接口,包括14位数据线,3位地址线A0、A1、A2,控制信号CS、CLR、WR、SEL。CS处于低电平是AD7836被选中;只有CLR处于高电平时D/A转换器内部数据寄存器值才能控制模拟电压输出值;WR为低电平有效,可以联合CS使数据写入输入缓存器内。SEL为高电平时用户设定的寄存器E值输出到VOUT,故可接地。当系统工作时,由于采用外部接口XINTF,对D/A芯片的操作和从SRAM中读写数据一样,控制D/A芯片的外部接口2区的起始地址是0X08 0000。可以在程序中随时改变相应值来控制D/A转换的电压值,进而控制打标点的位置。如要打标图片,则可以按逐行扫描的方式输出各打标点的位置和激光能量。
DSP与AD7836的引脚连接如图2所示。
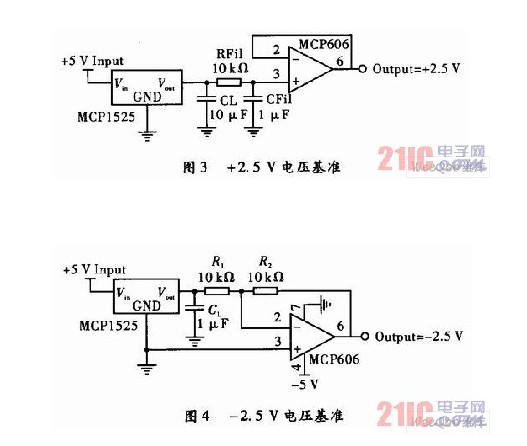
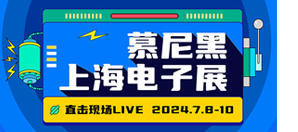
由于使用的振镜的驱动电压范围也是±5 V,在本系统中各通道的参考电压VREF(+)和VREF(-)分别接±2.5 V。精确±2.5 V参照电压在硬件电路设计中采用Microehip公司的专用2.5 V电压基准源MCPl525和OP运算放大器MCP606。如图3所示,+2.5 V的电压基准由MCPl525产生后,为了降低噪音,采用了RC低通滤波和MCP606,在这里MCP606作为电压跟随器使用。如图4所示,-2.5 V电压则由+2.5 V通过两个等值电阻和MCP606构成的分压器产生。
AD7836和DSP的引脚电压不同,故不能直接相连,系统中选用了SN74ALVCl64245芯片来隔离两边的数据总线。其输出使能控制引脚OE1和OE2均接低电平,数据线的方向DIR1和DIR2都接高电平,保证芯片输出端随输入端即时变化。
2.3 扩展数据存储器
存储器用来暂存从上位机传来的打标数据,外部扩展存储器采用IS61LV51216,为512 kB,16位的SRAM存储器,共有19位地址总线,16位数据总线。本系统中SARAM存取时间为10 ns,CMOS工艺,3.3 V供电,输入输出为TTL兼容,适合作为DSP的外部扩展存储器。存储器通过DSP的外部接口XINTF扩展,采用F2812的/XZCS6AND7引脚作为片选,因此对应于存储器映射的外部接口6区,地址范围为0X10 0000~0X17FFFF。
2.4 CPLD系统
本系统中CPLD采用Altera公司的MAX3000A系列的EPM3256A芯片,CPLD的固件用软件MAX+plusII设计。CPLD主要用来控制USB芯片的数据传输,并由其扩展出中断按键和液晶显示模块。另外DSP系统预留了多路GPIO接口,可以控制步进电机组成的多维运动控制平台。通过预留GPIO口并使用CPLD芯片,使系统的可扩展性增强。
3 控制器系统软件开发
控制系统的软件由两部分组成,上位机采用可视化面向对象语言VB 6.O设计,主要负责打标数据的产生和打包传输,以及用户界面实现人机交互;下位机DSP由C/C++编写系统程序,用TI公司提供的高效的C编译器和集成开发环境:代码工作室(CCS)来开发。控制系统的主要流程图如图5所示。

图5 控制系统的主要流程
打标机开机后下位机程序根据用户界面上参数对各芯片和存储器的初始化,参数包括激光能量、扫描次数、文字填充方式等。然后等待上位机由USB接口传送打标数据,打标数据先保存在数据存储器。这时无论从用户界面还是键盘上发出开始打标指令后,DSP从数据存储器中取出打标数据,送入D/A芯片中。D/A芯片输出相应的电压驱动振镜,直到完成本次打标。相同的打标图形只需传输一次数据,从软件或键盘上选择开始加工按钮即可。
在进行图形打标时,导入图形文件并作图像处理后,转化成打标位置数据;文字打标时在VisualBasic中调用Windows API函数GetGly-phOutline得到文字的外形轮廓,可以进行放缩、旋转等操作而不影响文字显示质量,并通过DrawGlyph函数将其显示效果在用户界面上显示。图6是软件用户界面汉字的显示效果。

4 结束语
文中介绍了一种基于TMS320F2812DSP的激光打标控制器,采用了一个4路输出的D/A转换器来控制振镜和激光电源,高性能D/A转换模块使激光打标的速度和精度有较大提高,使用USB接口使打标控制器可以即插即用,且提升了数据传输的稳定性。系统上位机用Visual Basic编程,下位机用C语言编程,程序移植容易。开发出的打标系统在速度、精度上均达到了理想的效果。文中描述了软硬件系统,对振镜式激光打标控制器的设计有普遍的参考价值。
声明:本内容为作者独立观点,不代表电源网。本网站原创内容,如需转载,请注明出处;本网站转载的内容(文章、图片、视频)等资料版权归原作者所有。如我们采用了您不宜公开的文章或图片,未能及时和您确认,避免给双方造成不必要的经济损失,请电邮联系我们,以便迅速采取适当处理措施;欢迎投稿,邮箱∶editor@netbroad.com。
| 微信关注 | ||
 |
| 技术专题 | 更多>> | |
 |
| 2024慕尼黑上海电子展精彩回顾 |
 |
| 2024.06技术专题 |




| 电子行业原创技术内容推荐 | |
 |


互联网违法不良信息举报
Reporting Internet Illegal and Bad Information editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006





















