【电源网】随着我国加入WTO 并逐步与国际市场接轨,高性能电池的使用量正大幅度增加,作为扣式电池一种的锂锰电池正 是其中之一。目前国内投产这类高能电池的厂家日益增多,市场前景十分广阔。但是大部分厂家的生产设备还停留在手工或半机械化的程度,生产效率十分低下;投 资力度较大的厂家则花费数千万元购买国外进口设备,严重增加产品成本,不利于打开国际销路。现实情况迫切需要国内自主设计开发一条符合锂锰扣式电池生产工艺的自动组装生产线系统,但是应用传统设计方法很难奏效。本文旨在依据公理化设计理论进行生产系统的方案设计,利用先进的设计理念解决这一难题。
公理化设计理论将机电产品作为整体的系统来看待,通过对功能需求域及设计参数域进行的解耦与耦合分析,得出最合理的优化设计方案。
1 公理化设计理论简述
公理化设计理论(Axiomatic Design Theory)是由美国麻省理工大学的Nam P.Suh 提出的。这种理论将信息量引入设计过程,是一种可量化的设计原理。它创造性地将设计过程描述成一种映射过程,即通过选择适当的设计参数,在功能需求域 (FR)和设计参数域(DP)之间建立映射,映射过程遵循独立性公理和信息公理,如图1 所示。
独立性公理即要求设计参数能保证功能需求的独立性,也就是说当调整某一个DP 来满足与之对应的FR 时,不影响其他的FR功能参数,在设计方案中每个单元都能独立地完成与之相关的所有功能域需求,单元之间只交换相关数据信息,而保持一定程度的相互独立性 能,这样同时也满足信息公理的要求;信息公理即在满足功能需求的前提下,使设计方案中的信息量最小,这样能极大地简化建立数学模型的过程,同时减少设计过 程中不必要因素的影响,降低控制难度和准确测量难度,方案更容易实现。
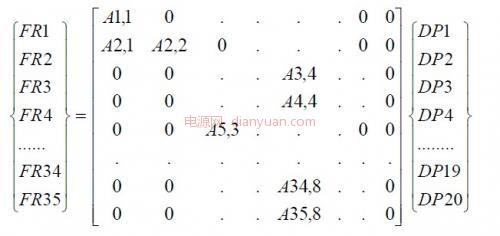
在公理化设计理论中,从功能需求域到设计参数域的映射关系被描述成向量矩阵形式,以便于量化计算。因此两者关系可表示为
{FR}=[A]{DP} (1-1)
其中{FR}为功能需求域向量表示,{DP}为设计参数域向量表示,[A]称为设计矩阵(Design Matrix)。根据独立性公理的要求,当功能需求向量个数与设计参数向量个数相等时,[A]呈现对角方阵,即
A={Aij=0 i≠j;Aij=1 i=j}
此时,[A]为非耦合矩阵,这样的设计为非耦合设计。这是满足独立性公理的最优设计方案,同时也是 信息量最少的设计方案。在不能完全满足独立性公理的时候,则需要采用解耦的方法,将[A]转变为下三角矩阵,这样可以通过顺序调整各设计参数来满足功能需 求,调整时不影响已满足的功能需求,其信息量在特定范围内为最小,这种设计称为解耦设计。信息量则以功能需求成功概率的倒数的对数来定义,即对于一个在基 本取值全程上精度分布为均匀的功能需求来说,其信息量为
I=log(L/2ΔL) (1-2)
其中,在L 上得到L 精确值的概率
p=2ΔL/L (1-3)
在这里,L 为某一FR 的基本值,±ΔL 为其精度范围。为了应用电子计算机计算信息量,习惯于用二进制位数度量信息量,多取底数为2 的对数。这样,设计对象的总信息量即为
IT=ΣIj (1-4)
根据信息公理的要求,设计方案应尽力使IT 最小,以较小的复杂性满足功能需求。
从一个完整的机电系统来看,依据公理化设计理论,设计过程可以量化为对功能需求域和设计参数域的信 息量计算。[3]通过对FR 和DP 的系统性分析,得到非耦合性设计。对于不能得到非耦合设计的,采用解耦的办法得到优化的解耦设计。同时分别计算功能需求信息量和设计参数信息量,其中设计 参数又分为结构参数和时域控制参数,将计算的信息量进行比较。在保证设计域信息量满足功能域信息量的要求情况下,依据两条设计公理,寻求独立性最好的最小 信息量设计方案,即最优的设计方案。
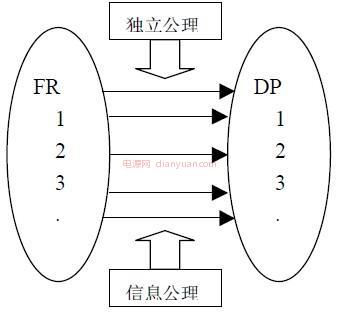
图1 原理示意图
相等时,[A]呈现对角方阵,即
A={Aij=0 i≠j;Aij=1 i=j}
此时,[A]为非耦合矩阵,这样的设计为非耦合设计。这是满足独立性公理的最优设计方案,同时也是 信息量最少的设计方案。在不能完全满足独立性公理的时候,则需要采用解耦的方法,将[A]转变为下三角矩阵,这样可以通过顺序调整各设计参数来满足功能需 求,调整时不影响已满足的功能需求,其信息量在特定范围内为最小,这种设计称为解耦设计。信息量则以功能需求成功概率的倒数的对数来定义,即对于一个在基 本取值全程上精度分布为均匀的功能需求来说,其信息量为
I=log(L/2ΔL) (1-2)
其中,在L 上得到L 精确值的概率
p=2ΔL/L (1-3)
在这里,L 为某一FR 的基本值,±ΔL 为其精度范围。为了应用电子计算机计算信息量,习惯于用二进制位数度量信息量,多取底数为2 的对数。这样,设计对象的总信息量即为
IT=ΣIj (1-4)
根据信息公理的要求,设计方案应尽力使IT 最小,以较小的复杂性满足功能需求。
从一个完整的机电系统来看,依据公理化设计理论,设计过程可以量化为对功能需求域和设计参数域的信 息量计算。[3]通过对FR 和DP 的系统性分析,得到非耦合性设计。对于不能得到非耦合设计的,采用解耦的办法得到优化的解耦设计。同时分别计算功能需求信息量和设计参数信息量,其中设计 参数又分为结构参数和时域控制参数,将计算的信息量进行比较。在保证设计域信息量满足功能域信息量的要求情况下,依据两条设计公理,寻求独立性最好的最小 信息量设计方案,即最优的设计方案。
2 锂锰扣式电池组装工艺
以CR2032 组装工艺为例,需要在带有集流网、负极片的负极壳体内依次加入隔膜和饱浸电解液的正极片,并在保证电解液完全渗透的前提下,加盖正极壳体并封口。经过广泛的市场调研,根据相关厂家要求,确定以下成熟工艺。
2.1 传送符合要求的负极壳体进入生产线系统
负极片是直径为16mm,厚度约为0.4mm 的锂片。要求把集流网点焊在负极壳底部,并把负极片压在集流网上,使其接触良好。这种负极壳体通过传送机构进入生产线,作为整个系统的基本物流。
2.2 剪切隔膜纸,并压入负极壳体
一般采用聚丙烯隔膜,依靠剪切机构裁成直径约为18.8mm 的圆片,然后由压入机构入壳。
2.3 加入以MnO2 为主要材料的正极片,并保证电解液浸透容量
正极片是直径约为16mm,厚度约为2mm 的复合材料圆片,其主要材料为MnO2。正极片必须充分浸透电解液以保证放电时间及电池容量的性能参数,并通过控制补液时序避免电液挥发的影响。
2.4 覆盖正极壳体,调整规正后封口并退料
传送正极钢壳到上料位置,覆盖已完成渗透的负极壳体,并在规整机构作用下进入封口模具,完成封口工作,最后退出成品。
3 方案论证过程流程
依据以上组装工艺要求对功能需求域进行分析,然后提出相应的设计参数。通过解耦和耦合计算,形成符 合独立性公理的设计方案,并对方案进行量化分析,根据信息公理评判方案的优劣与好坏。值得注意的是,由于以组装工艺为基本依据,无论FR 域还是DP 域,每个因素在实行范围内所占的比例各不相同,因此在方案论证时应注意增加权重因素。
具体方案论证的实施流程由图2 表示。

图2 方案论证过程流程
4 生产系统功能需求分析
从整体机械电子产品系统的角度出发,由于组装工艺要求比较纷杂,其功能需求应从基本工艺要求和外界 环境交流两个方面分析入手。基本工艺要求部分保证了设计机构能完成组装任务的主功能参数;外部环境交流部分从物质、信息、能量、人机等四个方面提出与系统 功能相关的辅助需求参数,两部分结合起来共同形成系统功能需求。这些参数既是系统设计参数分析的根本依据,也是功能需求域信息量计算的基本数据。
下面的表1 列出了功能需求分析参数结果,针对各个参数在生产系统中需求程度的不同,结果中包含权重因素。权重集的确定有很多方法,例如1 至9 比率标度法、相关专业专家打分法等等。为了了解实用行业的需求,在对国内几个电池生产厂家和设备加工领域进行调研后,采用专家打分法得出如下的权重值,其 中基本工艺要求属于设计参数必须予以保证的功能结果,故占据60%的信息量比例。
表1

根据以上的功能需求分析结果,由式(1-2)(1-3)(1-4)可得计算功能需求域总信息量如下:

5 生产系统设计参数分析
针对功能需求分析的要求,应提出相应的设计参数。在基本工艺要求中,FR1、FR2、FR5、 FR6 均属于固定要求,可以通过结构参数来实现;FR3、FR4 则需要结构参数和时域参数共同实现,因其加工检测量都随着时间变化而发生改变。同样道理,对于其他各方面的功能需求也需要相应的结构参数或时域参数来满 足,这些参数并不一定是最终的设计参数,但它们是独立性解耦和耦合的基本信息。设计参数分析如表2。
表2

6 解耦及耦合的设计过程
依据以上功能需求域的具体要求和设计参数域的基本实现参数,下一步工作的目的是通过解耦的方法来发 现设计过程中的工程冲突和冗余单元,然后依靠耦合的办法解决工程冲突和去除冗余单元,最终实现各工作单元的相对独立(独立性公理)和设计域信息量最小(信 息公理)的系统设计要求。通常认为机械电子产品具有这样从大到小的三级结构:机械电子系统(Mechanical Electronics System-MES)、机械电子组元(Mechanical Electronics Component-MEC)、机械电子单元(Mechanical ElectronicsElement-MEE)。解耦和耦合的目标就是使机械电子产品形成这样的规律性独立结构体系。在这里,根系统(基本功能需求和设 计参数层次)分析的目的就是能够形成逐个独立的机械电子组元,形成基本的设计参数类别;子系统(机械电子组元内部层次)分析则是以机械电子组元为分析对 象,从中构建独立的最小单位----机械电子单元,使信息量的计算从最底层开始,结果更为精确。
6.1 根系统解耦耦合分析
解耦和耦合的方法有很多种,这里介绍一种较直观的方法,即矩阵化简法。
从上式可以看出,依据表2 列出的设计矩阵A 应是一个35 行20 列的矩阵,其中Aij 即设计矩阵的相关元素,代表了设计域参数域功能需求的内在联系,很明显尚不满足公理设计原则的对角阵要求。需要对照表1 和表2 的注释,对上式的左右两边做行列变换,逐步变设计阵为对角矩阵或者下三角矩阵。
值得注意的是,在这里的行列变换不是纯粹数学意义上的初等变换,而是结合实际工程设计要求的的设计 思想的转变以矩阵行列变换的形式来表现,因此并不完全拘泥于固有的数学运算法则,而必须满足工程设计中的基本原则和公理。这种矩阵化简法能够直观的表现功 能域和设计域的内在联系,在解耦和耦合的步骤上也简单明了,能够解决设计中的工程冲突,并能有效去除冗余单元,不失为一种很好的实用方法。
经过行列变换,形成下面的下三角矩阵式:

式中各项意义如表3 所示。
表3

设计域矩阵中的各个机械电子组元(MEC)之间存在着最小的相关性,下一级设计参数的改变不会影响 上一级参数的设计结果,而只影响包含其参数内容的再下级设计工作。完成根系统的解耦耦合分析后,还需要对各MEC 进行面向对象式的子系统分析,方法则采用子系统的公理化设计原理及方法。通过分别对子系统功能域和设计域进行具体层次的分析,最终得出各个基本满足相对独 立性的基层最小系统——机械电子单元(MEE)。在机械电子单元中,各设计参数已具体量化,再依据信息公理及式(1-2),精确计算方案设计的信息含量, 形成对方案的完整优化设计。
6.2 子系统解耦耦合分析
对于子系统的分析集中在以下3 个方案上,通过对各设计子域和功能子域的分析得出各个方案的设计总信息量,如表4 所示。
表4

这三种方案除了以上主要区别之外,还存在诸如干燥功能需求、人机交互需求等次要区别,限于篇幅,不再赘述。下面给出第3 方案的子系统分析结果和单元信息量计算。其中单元信息量值根据各MEE的具体设计参量由式(1-2)计算得出。
表5

在第3 方案的解耦耦合分析中,去除了各层次的冗余单元,包括有关的结构参数和时域参数,用更加简洁的功能原理方案加以解决,例如将包含注液监测机构、行进称重机 构及条形或环形行进机构在内的渗透单元改用单独渗透和精密计量补注的设计单元来代替等等,不仅去除了冗余限制,降低加工制造成本,而且从根本上减小了动作 控制及信号采集的难度,最优限度地利用了有用信息。
7 结论
从设计总信息量上分析,方案3 符合信息公理的要求,与功能需求域的总信息量相比较,设计参数域总信息量略高,在满足功能需求的同时,又遵循了信息公理的要求。各机械电子单元也符合独立性公理的要求,故应为最优方案。
整个方案设计过程是依据公理化设计理论,面向各个层次各个单元进行分析计算的过程。这种方法把机电 产品作为统一的系统看待,综合考虑机构、液压、气动、电气等实现方法,力求形成彼此独立或相关性最小的设计单元,同时引入信息量概念,变机电系统方案设计 的模糊定性分析为精确的信息量定量计算,通过对各种设计方案的公理化分析,得出最终的优化解,简化了方案论证评判工作。目前应用于宁波力达电池有限公司锂 锰扣式电池全自动组装生产线的设计工作中,已取得明显成效,是我国工控自动化的一大进步之处。
声明:本内容为作者独立观点,不代表电源网。本网站原创内容,如需转载,请注明出处;本网站转载的内容(文章、图片、视频)等资料版权归原作者所有。如我们采用了您不宜公开的文章或图片,未能及时和您确认,避免给双方造成不必要的经济损失,请电邮联系我们,以便迅速采取适当处理措施;欢迎投稿,邮箱∶editor@netbroad.com。
| 微信关注 | ||
 |
| 技术专题 | 更多>> | |
 |
| 2024慕尼黑上海电子展精彩回顾 |
 |
| 2024.06技术专题 |


| 电子行业原创技术内容推荐 | |
 |


互联网违法不良信息举报
Reporting Internet Illegal and Bad Information editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006





















