导航、雷达、应答、授时、航天测控等领域需要测量发射、接收装置本身的时延。调制系统是这类装置中的重要组成部分。本文介绍了基于示波器的调制系统时延测量方法。借助现代高带宽、高采样率的数字存储示波器,可以自动完成被测系统输入输出信号的采集、处理和测量。
一.引言
在导航、雷达、应答、授时、航天测控等领域,通过解析发射和接收信号的时间和相位关系来获得目标 的距离或速度。用于测距、测速的无线电波不仅在空间传播有时延,在发射和接收装置中传输、处理也有时 间延迟。发射、接收装置的核心部分是调制解调系统,准确测量调制系统的时延,并消除其在整个系统中引入的误差,是提高测距、测速精度的前提。时延的测量方法可以概括为时域测量和频域测量两大类。
频域测量是用矢量网络分析仪测出设备的相位-频率特性,即 S21 的相位曲线,再对相频曲线微分就能得到设备的群时延。这种测量方法适用于线性元器件,而不适合变频器件。虽然也存在三混频器法、双音法等方法来解决变频器件的群时延测量,但这些方法无法解决混频器非互易性的问题。
时域测量一般是用时间间隔测量仪或示波器直接对设备输入和输出的信号进行测量。时间间隔测量仪只能测量波形简单的信号,如脉冲。而示波器能够直接采集、测量波形复杂的信号,适用性更广。 现代数字存储示波器可以实现带宽 65GHz、采样率 160GSa/s 的高速采样[1],时间分辨率极高,并且可以对采样后的波形数据直接进行数字变频、滤波、解调、互相关等各种信号处理,因此用数字示波器可以方便地测量调制系统的时延。本文以型号为 LeCory LabMaster 10-65Zi 的示波器为例,详细阐述调制系统时延的测量、校准方法,并分析测量的不确定度。
二.测试框图和校准方法
图 1 是示波器测量设备时延的连接框图。一激励信号源通过功分器输出两路信号,一路输入到被测设备,一路输入到示波器的一个通道。被测设备输出的信号接到示波器的另外一个通道。示波器电缆#2电缆#3功信号源 分器 被测设备电缆#1
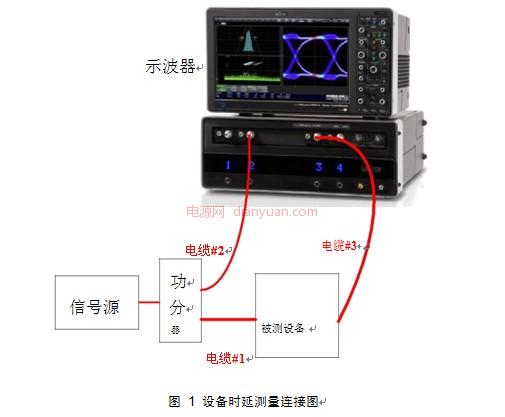
图 1 设备时延测量连接图
这种连接方式使用的三条同轴电缆#1~#3 以及功分器会引入误差。在测量之前需要校准。电缆#1 和电缆#2,以及功分器两个输出端口传输的是同一信号,信号传播速度是一致的,因此可以采用交换法消除电缆#1和#2 以及功分器的延迟差异。功分器两路输出端口可以看作分别和电缆#1 和#2 是一体的。假设三条电缆的时延分别为 T1, T2, T3,被测设备的时延为 T0。
先用示波器测量输入的两个信号时延,结果计为 Tm1,则满足:Tm1 T1 T0 T3 T2
将电缆#1 和#2 互换,即电缆#2 接到被测设备,电缆#1 接到示波器,但不改变它们和功分器的连接。时延测量结果计为 Tm2,则满足:Tm2 T2 T0 T3 T1
两式相加能够去掉电缆#1 和#2 的影响:T0 T3 (Tm1 Tm2)/2
为了消除电缆#3 引入的时延,使用 LeCroy 示波器内置的电缆去嵌功能[2],根据电缆的 S 参数去掉电缆引 入的时延。这样示波器测量值已经是消除了 T3 的结果。还有一个时延误差来源是示波器两个通道之间的时延差异,这可利用示波器自带的快沿信号来校准,校准后的时延测量值自动消除了通道间的延迟差异。
三.时延测量方法
图 2 是一个 FSK 基带信号和射频信号的时延测量示意。利用示波器测量设备时延的难度在于,被测设备 的输入和输出信号不在同一个频段,有可能分别是基带、中频或者射频域。实际用示波器采集到的信号不会 像图 2 这样容易地分辨出频率、相位的变化位置,必须对波形数据进行处理后才能测量。
测量延迟
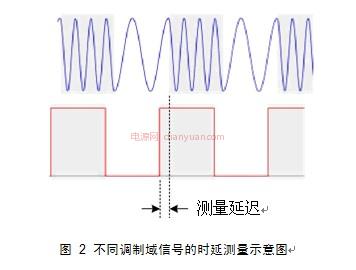
图 2 不同调制域信号的时延测量示意图
LeCroy 示波器内置了多种数字信号处理算法和自动测量功能,可以直接在示波器上自动完成信号的采集、处理、测量。根据信号处理的特点,时延测量具体可分为以下几种。
1.包络检波法
PSK,QAM 这类相位变化的数字调制信号,由于脉冲成形滤波器的缘故,其相位翻转时刻就是调制 信号功率极小值的时刻。因此可以利用 LeCroy 示波器的解调运算[3]得到信号的包络,包络极小值的水平 位置就是相位翻转时刻。图 3 是一个 16QAM 中频信号和射频信号时延测量的例子。对两个信号都进行 幅度解调后,得到各自的包络信号。再利用示波器自动测量两个包络极小值的间隔时间,就得到中频和射频信号的时延。
中频信号的包络
中频信号
时延
射频信号的包络
射频信号
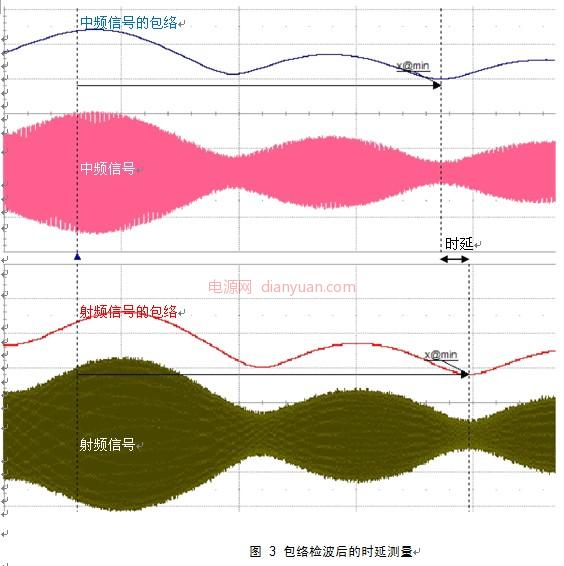
图 3 包络检波后的时延测量
2.参数追踪法
可以利用示波器测量调制信号每个周期的频率、相位或幅度等参数,再利用示波器内置的测量参数追踪 功能,画出参数随时间变化的曲线。图 4 是一个对信号频率参数追踪的示意。上面的波形是一个扫频信号,下面的波形是扫频信号的频率参数追踪曲线。
扫频
信号
频率参数
追踪曲线
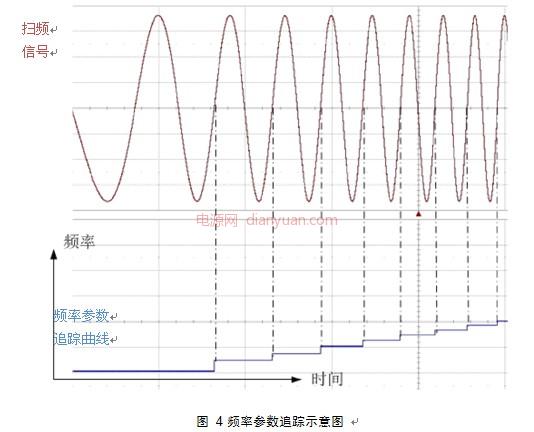
图 4 频率参数追踪示意图
图 5 是利用参数追踪功能测量 FSK 基带信号和调制信号时延的结果。上方的波形是示波器采集的射频调 制信号,中间的波形是对射频信号每个周期的频率进行参数追踪的曲线,它直观地反映了射频信号的频率切 换过程。将其和实际测量的基带信号比较,就能测量出基带和射频信号的时延。
FSK 调制信号
FSK 调制信号的频率追踪曲线
时延
基带信号
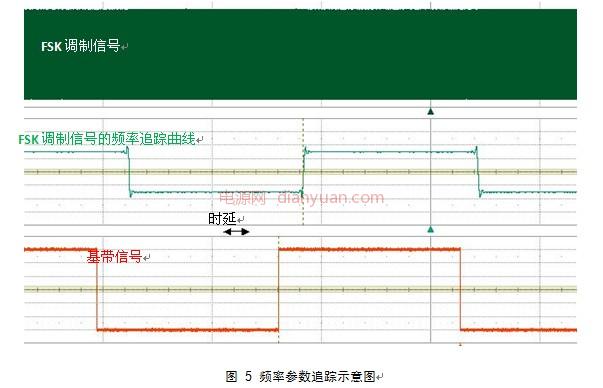
图 5 频率参数追踪示意图
3.希尔伯特变换与其他自定义算法
除了前面两项示波器内置的运算以外,还有很多成熟的算法,比如运用希尔伯特变换来检波从而获得相位翻转点。图 6 是在示波器内集成 MATLAB 程序检测信号相位翻转点的例子。还有用互相关运算来获得时延。
现在和将来不断有学者研究各种新的信号处理算法来解决时延测量的问题。LeCory 示波器中可以集成使用者 自定义的 MATLAB、C/C++、VB Script 程序[4],来实现这类算法。通过 MATLAB 程序检测出的信号包络示波器内置 MATLAB 程序编辑窗口

图 6 示波器内置
MATLAB 程序检测调制信号包络
三.示波器时延测量不确定度评估
本文所述测量方法的不确定度,既有来源于示波器的,也有源于测量算法的。示波器本身的时延测量不确定度包括抖动噪底、触发抖动、时间分辨率、电缆和通道校准的不确定度等。为了提高这部分测量的精度,可以选用抖动噪底小、采样率高的示波器。示波器时延测量不确定度的大小可以通过实际测试来估计。测试的连接图类似图 1,但不再接入被测设备,电缆#1 和#3 直接通过转接器连接在一起。示波器使用 LeCoryLabMaster 10-65Zi,采样率设为 160GSa/s,在示波器内设置对电缆#3 去嵌。信号源分别输出 100MHz~20GHz若干组正弦信号,在示波器中多次测量两路信号的时延,记录测量值的标准偏差值。交换电缆#1 和#2 再测试一遍。结果显示每次测量的标准偏差在 500fs 量级,经过校准后两个通道的时延残差小于 2ps 。图 7 是示波器测量得到的、没有包含被测设备的时延统计值。

图 7 示波器引入的时延测量结果统计分析
四.结束语
本文所述的设备时延方法已经在多个单位的项目中得到实际验证。这些项目的被测设备涉及 BPSK、QPSK、FSK、QAM、PDM 等多种体制的调制系统。无论是测试的简便性和自动化程度,还是测量结果的不确定度,都比之前的频域测量法和人工读数更优。
参考文献
[1] LabMaster 10Zi Operator's Manual Rev A. Teledyne LeCroy Corporation
[2] Using LeCroy’s Eye Doctor to De-Embed Probes,LAB_WM772,. Teledyne LeCroy Corporation
[3] Modulation Analysis - FM, LAB_WM405B , Teledyne LeCroy Corporation
[4] Using LeCroy Oscilloscopes with MATLAB, Teledyne LeCroy Corporation
万力劢 Teledyne LeCroy 公司成都代表处
声明:本内容为作者独立观点,不代表电源网。本网站原创内容,如需转载,请注明出处;本网站转载的内容(文章、图片、视频)等资料版权归原作者所有。如我们采用了您不宜公开的文章或图片,未能及时和您确认,避免给双方造成不必要的经济损失,请电邮联系我们,以便迅速采取适当处理措施;欢迎投稿,邮箱∶editor@netbroad.com。




| 电子行业原创技术内容推荐 | |
 |


互联网违法不良信息举报
Reporting Internet Illegal and Bad Information editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006























