BLDC 电机通过什么驱动?
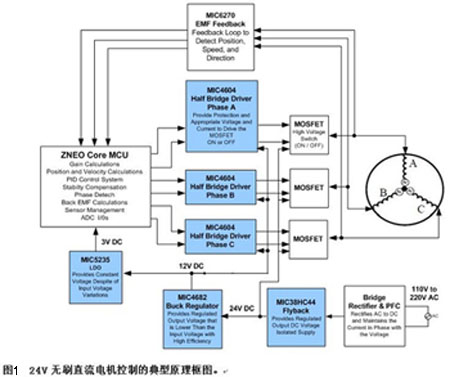
有几种方法可用于驱动 BLDC 电机;一些基本系统要求如下所列:
a.大功率晶体管。这些通常是场效应管 (MOSFET) 或绝缘栅双极晶体管 (IGBT),可承受高压(满足电机的要求)。多数家电使用的电机功率为 1/2 至 3/4 马力(1 马力=734 瓦特)。因此,典型电流能力可达到 10A。对于高压系统而言(通常 >350V),可使用 IGBT。
b.MOSFET/ IGBT 驱动器。通常,可使用一组 MOSFET/ IGBT 驱动器。可选择“半桥”驱动器或三相驱动器。这些解决方案能够操作的电压必须为电机电压的两倍,以应对电机产生的逆电动势 (EMF)。此外,这些装置需要通过设置时间和切换控制提供功率晶体管保护,从而确保底部晶体管打开之前关掉顶部晶体管。
c.反馈元件/控制。设计师应在所有伺服控制系统中设置一些“反馈元件”。例如光学传感器、霍尔效应传感器、转速计及最简单的“EMF 传感”。各种反馈方法都非常有用,主要取决于所需精确度及所需 RPM 和扭矩。许多消费者电器通常使用反电动势传感的无传感器技术。
d.模拟数字转换器 在许多情况下,需要设置模拟数字装置,以将模拟信号转换为数字信号,从而将数字信号发送至系统 MCU。
e.MCU. 所有闭环控制系统(BLDC 电机几乎一直属于此群组)均需要 MCU,以实现伺服回路控制、计算、纠正、PID 控制机传感器管理。这些数字控制器通常为 16 位,但是复杂性较低的应用可使用 8 位控制器。
f.模拟功率/调节器/基准 除了上述组件以外,许多系统还包括辅助电源、电压转换及其他模拟设备,如管理器、LDO、直流/直流及运算放大器。
三相无刷直流电机的基本操作原理
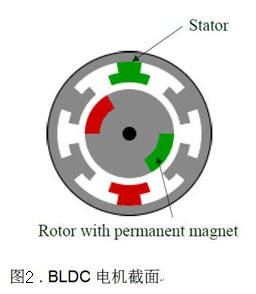
无刷直流 (BLDC) 电机为同步电机,转子和线圈绕组中设有永久磁铁。它们可在电机定子上产生电磁(参见图 5)。电气端子直接连接至定子绕组;因此,转子上未连接刷子或机械装置(如有刷电机)。BLDC 电机使用直流电源和开关电路,在定子绕组上产生双向电流。开关电路必须在每个绕组中使用一个高端开关和低端开关,因此一个 BLDC 电机共使用 6 个开关。
现代电机设计采用固态开关,如MOSFET 或 IGBT,这取决于与继电器相比时电机的速率和电压。此外,还必须考虑成本、可靠性和尺寸(参见图 2)。开关电流产生适当的磁场极性,可吸引相反极性,排斥相同极性。从而产生磁力,促使转子旋转。将永久磁铁用于转子可为设计师提供机械利益;并可减小尺寸,降低重量。与有刷电机和感应电机相比,BLDC 电机的热特性更优,因而成为掀起机械系统节能新浪潮的理想选择。
BLDC 通常使用三个相位(绕组),每个相位具有120度的导通间隔(参见图 3)。
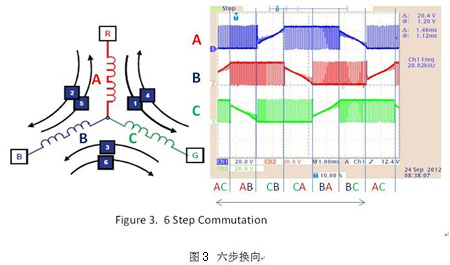
由于为双向电流,每个相位按照每个导通间隔有两个步骤。这是一种镀锡六步换向。例如,换向相序可为 AB-AC-BC-BA-CA-CB。每个导电阶段标记一个步骤,任何时候只能由两个绕组导通电流,第三个绕组悬空。未励磁绕组可用作反馈控制,构成无传感器控制算法特征的基础。
为了保持在转子之前的定子内部的磁场,并产生最佳扭矩,必须在精确的转子位置完成从一个扇形区到另一个的过渡。通过每 60 度转向的开关电路获得最大扭矩。所有开关控制算法均包含在 MCU 中。微控制器可通过 MOSFET 驱动器控制开关电路。MOSFET 驱动器包含适当响应时间(如维持延迟及上升和下降时间)和驱动能力(包括转换 MOSFET / IGBT “开”或“关”状态所需的门驱动电压和电流同步)。
转子位置对于确定电机绕组换向所需的正确力矩非常重要。在精度要求较高的应用中,可使用霍尔传感器或转速计计算转子的位置速度和转矩。在首要考虑成本的应用中,逆电动势 (EMF) 可用于计算位置、速度和转矩。
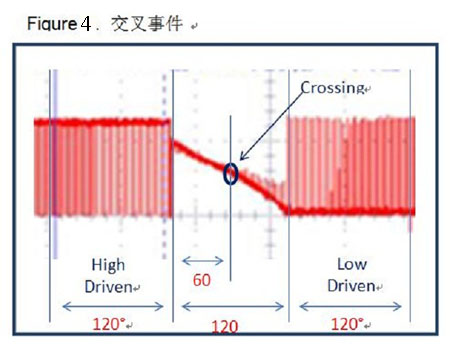
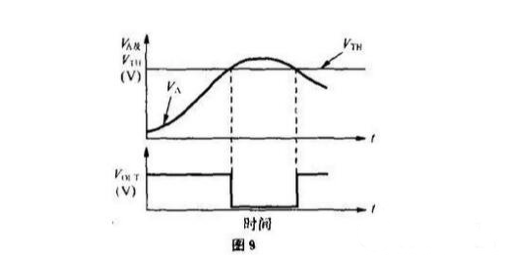
逆电动势是指永久磁铁在定子绕组中产生的电压。电机转子旋转时会出现这种情况。共有三个可用于控制和反馈信号的主要逆电动势特征。第一,适用于电机速度的逆电动势等级。因此,设计师使用工作电压至少为标准电压的 2 倍的 MOSFET 驱动器。第二,逆电动势信号的斜率随速度增加而增加。第三亦即最后者,如图 4 所示的“交叉事件”中逆电动势信号是对称的。精确检测交叉事件是执行逆电动势算法的关键。
逆电动势模拟信号可使用高压运算放大器和模拟数字转换器(广泛应用于最现代的微控制器)按每个混合信号电路转化至 MCU。每个至少需要一个 ADC。使用无传感器控制时,启用顺序至关重要,这是由于 MCU 最初不确定转子的初始位置。首先启动电机,激励两个绕组,同时从逆电动势反馈回路进行几次测量,直到确定了精确位置。
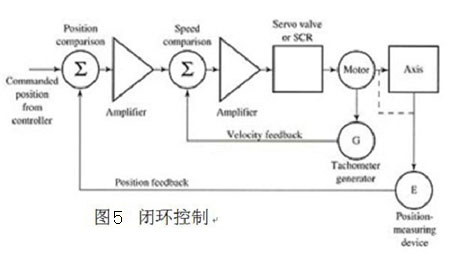
通常可使用具有 MUC 的闭环控制系统操作 BLDC 电机。MCU 可执行伺服回路控制、计算、纠正、PID 控制及传感器管理(如逆电动势、霍尔传感器或转速计)(参见图 5)。这些数字控制器通常为 8 位或更高,需要 EEPROM 储存固件,从而获得设置所需电机速度、方向及维持电机稳定性所需的算法。通常,MCU 可提供允许无传感器电机控制构架的 ADC。该构架可节省宝贵成本和电路板空间。MCU 兼具较强可构造性和灵活性,可满足优化应用算法之所需。模拟 IC 可为 MUC 提供高效电源、电压调整、电压基准,能够驱动 MOSFET 或 IGBT及故障保护。采用这两种技术均可高效地操作三项 BLDC 电机,且与感应电机和有刷电机价格相当。
总结
在许多市场和应用中,向高效 BLDC 电机过渡的趋势越来越普遍。这是由于 BLDC 电机用于以下优势:
●高效(达 75%,交流电机仅为 40%)
●热量更少
●更高可靠性(无电触头)
●可在危险环境下操作更加安全(无灰尘产生,而有刷电机则有)。
通过在关键任务子系统中使用 BLDC 电机,可减少重量。这意味着在车辆中应用节约更多燃油。由于 BLDC 电机完全采用电子整流,因此更易于高速地控制电机的扭矩和 RPM。全球许多国家面临着电网不足引起的有效功率不足。可以肯定的是,为了更有效地使用 BLDC 电机,少数国家正在提供补贴或正准备提供补贴。BLDC 部署是在避免对我们的生活方式造成不利影响的前提下促进绿色环保,节约全球宝贵资源的趋势之一。
声明:本内容为作者独立观点,不代表电源网。本网站原创内容,如需转载,请注明出处;本网站转载的内容(文章、图片、视频)等资料版权归原作者所有。如我们采用了您不宜公开的文章或图片,未能及时和您确认,避免给双方造成不必要的经济损失,请电邮联系我们,以便迅速采取适当处理措施;欢迎投稿,邮箱∶editor@netbroad.com。
| 微信关注 | ||
 |
| 技术专题 | 更多>> | |
 |
| 2024慕尼黑上海电子展精彩回顾 |
 |
| 2024.06技术专题 |



| 电子行业原创技术内容推荐 | |
 |


互联网违法不良信息举报
Reporting Internet Illegal and Bad Information editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006





















