гААгАА
еЉХи®А
гААгААиґЕе£∞ж≥ҐзФµжЬЇ(USM)еЕЈжЬЙиГље§ЯзЫіжО•иЊУеЗЇдљОиљђйАЯе§ІеКЫзЯ©пЉМзЮђжАБеУНеЇФењЂ(еПѓиЊЊmsйЗПзЇІ)гАБеЃЪдљНз≤ЊеЇ¶йЂШ(еПѓиЊЊnmйЗПзЇІ)пЉМжЧ†зФµз£Беє≤жЙ∞з≠ЙиѓЄе§ЪдЉШзВєгАВUSMзЪДињРи°МйЬАи¶БжЬЙдЄ§иЈѓеЕЈжЬЙдЄАеЃЪеєЕеАЉпЉМзЫЄдљНдЄКж≠£дЇ§(жИЦеПѓи∞Г)пЉМйҐСзОЗеЬ®20kHzдї•дЄКзЪДйЂШйҐСдЇ§жµБзФµжЇРгАВй©±еК®дњ°еПЈжЇРзЪДеєЕеАЉгАБйҐСзОЗеПКзЫЄдљНзЫіжО•ељ±еУНUSMзЪДжАІиГљгАВдЄЇдЊњдЇОUSMзЪДжАІиГљжµЛиѓХеПКз†Фз©ґпЉМйЬАи¶БжПРдЊЫдЄАзІНеЬ®еєЕеАЉгАБйҐСзОЗгАБзЫЄдљНдЄКеЭЗеПѓи∞ГзЪДжµЛиѓХзФµжЇРгАВдї•еЊАзЪДиґЕе£∞ж≥Ґй©±еК®еЩ®е§ЪйЗЗзФ®еИЖзЂЛеЩ®дїґжЮДжИРе¶ВжЦЗзМЃпЉМеЕґзФµиЈѓзїУжЮДе§НжЭВгАВжЦЗзМЃиЩљзДґжФєзФ®FPGAжИЦCPLDзФЯжИРпЉМдљЖжЙАзФЯжИРзЪДдњ°еПЈйҐСзОЗеПШеМЦжШѓдЄНињЮзї≠зЪДгАВжЦЗзМЃжШѓзФ®еНХзЙЗжЬЇеТМдЄУзФ®зЪДDDSиКѓзЙЗпЉМе≠ШеЬ®жКЧеє≤жЙ∞жАІеЈЃпЉМеПѓйЭ†жАІдљОзЪДеЉКзЂѓгАВ
гААгААжЬђжЦЗдїЛзїНдЇЖеЯЇдЇОDLLжХ∞е≠ЧйҐСзОЗзЫіжО•еРИжИРжКАжЬѓ(DDS)зФ®ALTERAеЕђеПЄзЪДFPGAеЩ®дїґеТМVHDLиѓ≠и®АзЉЦз®ЛпЉМжМЙзЫЄдљНзіѓеК†зЪДжЦєж≥ХдЇІзФЯдЄ§зЫЄеЫЫиЈѓйҐСзОЗзЫЄдљНеПѓи∞ГзЪДйЂШйҐСPWMдњ°еПЈпЉМзїПињЗй©±еК®зФµиЈѓгАБеЕЙиА¶йЪФз¶їзФµиЈѓдљЬдЄЇе§ЦйГ®еКЯзОЗжОІеИґзФµиЈѓHж°•зЪДеЫЫдЄ™йЧЄйЧ®й©±еК®дњ°еПЈпЉМHж°•дЄїеЫЮиЈѓжО•еЕ•зЪДжШѓеѓєеЄВзФµзїПи∞ГеОЛгАБйЪФз¶їгАБжХіжµБеПКжї§ж≥ҐеРОзЪДзЫіжµБзФµгАВзФ±йЧЄйЧ®й©±еК®дњ°еПЈеѓєиѓ•зЫіжµБзФµињЫи°МйАЪжЦ≠жОІеИґпЉМ嚥жИРеПѓи∞ГеєЕеАЉгАБйҐСзОЗгАБзЫЄдљНеЈЃзЪДдЄ§зЫЄйЂШйҐСPWMж≥ҐзЪДдЇ§жµБдњ°еПЈпЉМеЖНзїПе§ЦеК†зФµжДЯеє≥жїСпЉМе∞ЖPWMж≥Ґдњ°еПЈеПШжИРз±їж≠£еЉ¶ж≥Ґдњ°еПЈпЉМеЃЮзО∞еѓєUSMзЪДжАІиГљжµЛиѓХгАВ
гААгАА
еКЯзОЗжОІеИґзФµиЈѓ
гААгААе¶ВеЫЊ1жЙАз§ЇпЉМеК†дЇОUSMзЪДAгАБBдЄ§зЫЄдЇ§жµБдњ°еПЈжШѓзФ±FPGAдЇІзФЯзЪДеЫЫиЈѓиДЙеЖ≤дњ°еПЈжОІеИґMOSзЃ°еЉАеЕ≥еѓєжХіжµБжї§ж≥ҐеРОзЫіжµБзФµињЫи°МйАЪжЦ≠жОІеИґпЉМеЬ®еЫЊ1жЙАз§ЇHж°•йАЖеПШеЩ®зЪДдљЬзФ®дЄЛпЉМе∞ЖзЫіжµБзФµйАЖеПШдЄЇдЄОйАЖеПШеЩ®еЉАеЕ≥йҐСзОЗзЫЄеРМзЪДзߩ嚥ж≥ҐдЇ§жµБзФµпЉМзїПдЄ≤иБФзФµжДЯеє≥жїСпЉМе∞±еЊЧеИ∞дЇЖUSMжЙАйЬАзЪДдЄ§зЫЄйЂШйҐСз±їж≠£еЉ¶ж≥Ґдњ°еПЈгАВиѓ•дњ°еПЈеПѓзФ±дЄїеЫЮиЈѓзЪДи∞ГеОЛеЩ®и∞ГиКВеєЕеАЉпЉМAгАБBдЄ§зЫЄзЪДзЫЄдљНеЈЃеПЦеЖ≥дЇОHж°•дЄ§дЊІйЧЄйЧ®й©±еК®дњ°еПЈзЪДзЫЄдљНеЈЃпЉМеН≥йЧЄйЧ®S1дЄОS2(жИЦS3дЄОS4)й©±еК®дњ°еПЈзЪДзЫЄдљНеЈЃгАВеРМдЊІж°•иЗВдЄНиГљеРМжЧґеѓЉйАЪпЉМдї•йБњеЕНе§ІзФµжµБйАЪињЗMOSеЉАеЕ≥зЃ°иАМжНЯеЭПеЉАеЕ≥зЃ°пЉМзРЖиЃЇдЄКеРМдЊІзЪДдЄ§дЄ™жОІеИґдњ°еПЈеЇФиѓ•зЫЄдљНдЇТи°•пЉМеЃЮзО∞жО®жМљиЊУеЗЇпЉМиАГиЩСеИ∞еЉАеЕ≥еЩ®дїґзЪДеїґжЧґзЙєжАІпЉМиѓ•дњ°еПЈеЉАеРѓйЧЄйЧ®жЧґи¶БжЬЙдЄАеЃЪзЪДеїґжЧґпЉМеН≥ж≠їеМЇжЧґйЧігАВйЙідЇОдї•дЄКеИЖжЮРеПКUSMжАІиГљжµЛиѓХзЪДйЬАж±ВпЉМйЧЄйЧ®жОІеИґдњ°еПЈеЇФеЕЈжЬЙйҐСзОЗгАБзЫЄдљНгАБж≠їеМЇжЧґйЧіеЭЗеПѓи∞ГзЪДеН†з©ЇжѓФе§ІдЇО50пЉЕзЪДPWMйЂШйҐСж≥ҐгАВ
гААгАА
PWMи∞ГйҐСи∞ГзЫЄйЂШйҐСдњ°еПЈзЪДдЇІзФЯ
гААгААеПВиАГжЦЗзМЃзЪДDDSиЃЊиЃ°пЉМе∞ЖдЄАдЄ™еС®жЬЯзЪДзߩ嚥ж≥ҐеєЕеАЉињЫи°М2nз≠ЙеИЖеРОжМЙй°ЇеЇПе≠ШдЇОдЄАдЄ™и°®ж†ЉдЄ≠пЉМзФ®йЂШйҐСжЧґйТЯfclkдЊЭжђ°жМЙи°®дЄ≠еЬ∞еЭАй°ЇеЇПиѓїеПЦеЕґжХ∞жНЃ(еєЕеАЉ)гАВеИ©зФ®зЫЄдљНзіѓеК†еЩ®еПѓдї•жѓПйЪФMдЄ™еЬ∞еЭАпЉМиѓїдЄАдЄ™еєЕеАЉдњ°жБѓгАВзߩ嚥ж≥ҐйҐСзОЗж≠£жѓФдЇОиЊУеЕ•жЧґйТЯйҐСзОЗеТМзЫЄдљНеҐЮйЗПMдєЛзІѓпЉМеН≥дЄЇеЯЇйҐСжЧґйТЯfclkпЉП2nзЪДMеАНгАВйАЪињЗи∞ГиКВж≠•иЈЭM(йҐСзОЗжОІеИґе≠Ч)еПѓи∞ГиКВдњ°еПЈзЪДйҐСзОЗгАВи∞ГиКВй¶Цжђ°жЙАиѓїROMи°®зЪДеЬ∞еЭАпЉМеПѓи∞ГиКВзߩ嚥ж≥ҐзЪДзЫЄдљНпЉМзІ∞иѓ•и∞ГиКВеПВжХ∞дЄЇзЫЄдљНжОІеИґе≠ЧгАВиЛ•ROMжЯ•жЙЊи°®дЄ≠0пЉМ1еРДеН†дЄАеНКеИЩеПѓеЊЧеИ∞йҐСзОЗгАБзЫЄдљНињЮзї≠еПѓи∞ГзЪДжЦєж≥Ґдњ°еПЈпЉЫжФєеПШи°®дЄ≠1зЪДжѓФдЊЛпЉМе∞±дЉЪеЊЧеИ∞дЄНеРМиДЙеЃљзЪДзߩ嚥ж≥ҐгАВиЛ•иГљдїОе§ЦйГ®и∞ГиКВ1зЪДжѓФдЊЛпЉМе∞±зФЯжИРдЇЖдЄАиЈѓйҐСзОЗгАБзЫЄдљНгАБеН†з©ЇжѓФеПѓи∞ГзЪДPWMдњ°еПЈгАВзФ±дЇОи°®дЄ≠еП™жЬЙдЄ§зІНжХ∞OеТМ1пЉМдЄФеЭЗињЮзї≠еЗЇзО∞пЉМеЫ†иАМеПѓзФ®жѓФиЊГеЩ®жЫњжНҐROMи°®пЉМе∞ЖеОЯжЭ•зЪДеЬ∞еЭАеПСзФЯиЃ°жХ∞еЩ®зЪДиЃ°жХ∞еАЉеИТеИЖдЄЇ2йГ®еИЖпЉМдЄАйГ®еИЖеѓєиЊУеЗЇдњ°еПЈжЄЕйЫґпЉМеП¶дЄАйГ®еИЖеѓєеЕґзљЃ1гАВ2зІНжЦєж°ИзЫЄжѓФпЉМеРОиАЕе§Іе§ІиКВзЇ¶дЇЖFPGAиµДжЇРгАВRTLзЇІеОЯзРЖеЫЊе¶ВеЫЊ2жЙАз§ЇгАВ
гААгААз®ЛеЇПиЃЊиЃ°дЄ≠зЪДFWORD[16пЉОпЉОO]дЄЇеОЯзРЖжППињ∞дЄ≠зЪДйҐСзОЗжОІеИґе≠ЧMпЉМињЮжО•дЇО32дљНиЃ°жХ∞еЩ®F32[32пЉОпЉО6]пЉМеЕґиЊУеЗЇдњ°еПЈFOUTзЪДйҐСзОЗжМЙе¶ВдЄЛеЕђеЉПиЃ°зЃЧFFOUT=fclkпЉП222¬ЈFWORDпЉМйҐСзОЗеИЖиЊ®зОЗдЄЇFmin=25fclkпЉП222пЉМжЬАе§ІиЊУеЗЇйҐСзОЗдЄЇFmax=FminFWORDmaxгАВељУз≥їзїЯйҐСзОЗfclk=50MHzжЧґпЉМFmin=0пЉО745HzпЉМFmax=97пЉО648kHzпЉМеН≥иЊУеЗЇйҐСзОЗеПѓеЬ®OпЉО7пљЮ97пЉО6HzдєЛйЧіи∞ГиКВгАВзЫЄдљНжОІеИґе≠ЧдЄЇ9дљНпЉМиЊУеЗЇдњ°еПЈFOUTзЪДзЫЄдљНеПѓжМЙе¶ВдЄЛеЕђеЉПиЃ°зЃЧпЉЪPOUT=360¬∞пЉП2¬∞√ЧPWORDпЉМжЬАе∞ПеИЖиЊ®зОЗдЄЇ360¬∞пЉП2¬∞=0пЉО7¬∞гАВDIEIN[8пЉОпЉОO]дЄЇеН†з©ЇжѓФ(ж≠їеМЇ)и∞ГиКВжОІеИґе≠ЧиЊУеЕ•пЉМеН†з©ЇжѓФжМЙиЃ°зЃЧеЕђеЉПпЉЪ(29-DIEIN)пЉП210x100пЉЕпЉМжЬАе§ІеН†з©ЇжѓФдЄЇ50пЉЕпЉМжЬАе∞ПжО•ињСдЇОOпЉМеН†з©ЇжѓФзЪДи∞ГиКВдї•дљњеЫЊдЄАHж°•еРМдЊІзЪДдЄ§дЄ™MOSзЃ°еИЪе•љдЄНеРМжЧґеѓЉйАЪдЄЇеЇ¶(жХЕеН†з©ЇжѓФдЄНиГље§ІдЇО50пЉЕ)пЉМеН†з©ЇжѓФ姙е∞ПдЉЪдљњжХідЄ™з≥їзїЯиљђжНҐжХИзОЗйЩНдљОгАВ
гААгААдї•еНХзЫЄи∞ГйҐСи∞ГзЫЄPWMдњ°еПЈиЃЊиЃ°дљЬдЄЇеЇХе±ВеЕГдїґпЉМеИ©зФ®VHDLзЪДзїУжЮДеМЦжППињ∞жЦєеЉП(дЊЛеМЦиѓ≠еП•)пЉМжМЙзЫЄдљНи¶Бж±Ве∞Ж4дЄ™еНХзЫЄи∞ГйҐСи∞ГзЫЄдњ°еПЈDDSеЕГдїґиЃЊзљЃжИРдЄНеРМзЫЄдљНжЭ•еЃЮзО∞гАВзЫЄдљНе≠ЧPWORDдЄЇ9дљНпЉМU0пЉЪPWORD=OпЉМеИЭеІЛзЫЄдљН=0пЉЫU2пЉЪPWORD=вАЬ100000000вАЭпЉМеИЭеІЛзЫЄдљНдЄЇ180¬∞пЉЫU1еЕГдїґзЪДеИЭеІЛзЫЄдљНPWOR-DпЉМU2еЕГдїґзЪДеИЭеІЛзЫЄдљНдЄЇPWORD+вАЬ00000000вАЭпЉМињЩе∞±еЃЮзО∞дЇЖUOеТМU1зЫЄдљНеЈЃдЄЇPWORDпЉМU0еТМU2пЉМU1еТМU2зЫЄдљНеЈЃеРДдЄЇ180¬∞пЉМдїОиАМеЃЮзО∞еЫЫиЈѓи∞ГйҐСи∞ГзЫЄPWMдњ°еПЈиЃЊиЃ°гАВ
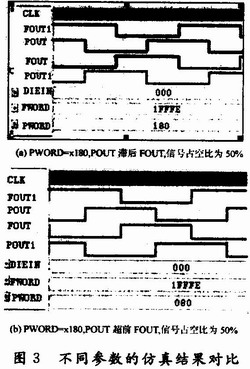
гААгААйАЪињЗи∞ГиКВFWORDгАБPWORDеПКDIEINжЭ•еИЖеИЂи∞ГиКВеЫЫиЈѓиЊУеЗЇдњ°еПЈзЪДйҐСзОЗгАБзЫЄдљНеЈЃгАБеЫЫиЈѓиЊУеЗЇдњ°еПЈзЪДеН†з©ЇжѓФгАВдїњзЬЯзїУжЮЬе¶ВеЫЊ3жЙАз§ЇгАВзФ±дїњзЬЯеЫЊеПѓзЯ•иґЕеЙН90¬∞еТМжїЮеРО90¬∞еЊЧеИ∞зЪДеЫЫиЈѓзЫЄеЇПж≠£е•љзЫЄеПНпЉМиЛ•зФ®еЕґй©±еК®еЫЊ1зЪД4дЄ™еЉАеЕ≥пЉМеЊЧеИ∞дЄ§зЫЄдЇТеЈЃ90¬∞зЪДдњ°еПЈпЉМдЄАдЄ™дЄЇAзЫЄиґЕеЙНдЇОBзЫЄпЉМеП¶йАРдЄ™дЄЇAзЫЄжїЮеРОдЇОBеРСгАВзФ®еЕґй©±еК®USMпЉМеЬ®дЄНжФєеПШзФµжЬЇињЮзЇњзЪДжГЕеЖµдЄЛпЉМйАЪињЗи∞ГиКВзЫЄдљНеЈЃPWORDпЉМжЦєдЊњзЪДеЃЮзО∞зФµжЬЇзЪДжЧЛиљђжЦєеРСжОІеИґгАВ
гААгААеЃЮй™МжµЛиѓХ
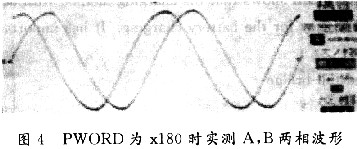
гААгААе∞ЖдЄКињ∞еЫЫиЈѓжОІеИґдњ°еПЈдЄЛиљљдЇОFPGAдЄ≠пЉМеЖНзїПињЗиµДжЦЩдїЛзїНзЪДй©±еК®йЪФз¶їж®°еЭЧеРОжЦљеК†дЇОеЫЊ1зЪДеКЯзОЗжОІеИґзФµиЈѓпЉМйАЪињЗз§Їж≥ҐеЩ®жµЛеЊЧUSMзЪДAгАБBдЄ§зЫЄж≥ҐељҐе¶ВеЫЊ4жЙАз§ЇгАВе∞ЖдЄКињ∞зФµиЈѓиОЈеЊЧзЪДдњ°еПЈеЇФзФ®дЇОUSM45иґЕе£∞ж≥ҐзФµжЬЇзЪДй©±еК®дЄ≠пЉМиѓ•зФµжЬЇжЙАи¶Бж±ВзЪДй©±еК®дњ°еПЈйҐСзОЗдЄЇ45пЉО8kHzпЉМзЫЄдљНеЈЃдЄЇ90¬∞пЉМе≥∞е≥∞еАЉеПѓиЊЊ300VгАВе∞ЖеЕґйҐСзОЗжОІеИґе≠ЧиЃЊеЃЪдЄЇFWORD=x0F000пЉМзЫЄдљНжОІеИґе≠ЧдЄЇPWORD=x180(жИЦx080)пЉМж≠їеМЇжЧґйЧіDIEIN=x33пљЮxFFдєЛйЧіи∞ГжХіпЉМжИРеКЯеЬ∞й©±еК®дЇЖUSM45зФµжЬЇгАВињРи°М10minеЈ¶еП≥пЉМзФµжЬЇиљђйАЯдЄЛйЩНпЉМйАЪињЗе∞ЖFWORDи∞Ге∞ПиЗ≥xED00пЉМеН≥дњ°еПЈйҐСзОЗдЄЇ45пЉО2kHzжЧґпЉМзФµжЬЇйАЯеЇ¶еПИдЄКеНЗеИ∞еЉАеІЛжЧґзЪДеАЉ(65иљђпЉПmin)гАВиґЕе£∞ж≥ҐзФµжЬЇдЄАиИђеЈ•дљЬеЬ®еЃЪе≠РеѓЉзЇ≥2йҐСзОЗзЙєжАІзЪДи∞РжМѓеТМеПНи∞РжМѓзВєдєЛйЧігАВйЪПзФµжЬЇињРи°МжЄ©еЇ¶зЪДеНЗйЂШпЉМеѓЉиЗіи∞РйҐСзОЗеТМеПНи∞РжМѓйҐСзОЗзЇ¶жЬЙ1пЉО4kHzзЪДеПШеМЦгАВзФ±дЇОUSM45зФµжЬЇеКЯзОЗе∞ПпЉМйҐЭеЃЪеКЯзОЗеП™жЬЙ2WпЉМдЄФжШѓз©ЇиљљжµЛиѓХпЉМеЫ†иАМжЄ©еНЗиЊГе∞ПпЉМи∞РжМѓйҐСзОЗзЪДеПШеМЦдєЯиЊГе∞П(еП™жЬЙе§ІзЇ¶0пЉО6kHzзЪДеПШеМЦ)гАВ
гААгААзїУиѓ≠
гААгААзФ±FPGAжМЙзЕІзЫЄдљНзіѓеК†жМѓиН°еЩ®зЪДжЦєж≥ХдЇІзФЯзЪДеЫЫиЈѓи∞ГйҐСгАБи∞ГзЫЄPWMдњ°еПЈпЉМеЕЈжЬЙиЊГйЂШйҐСзОЗеИЖиЊ®зОЗпЉМеЬ®дњЭжМБзЫЄдљНињЮзї≠зЪДеЙНжПРдЄЛпЉМиГљеЃЮзО∞ењЂйАЯйҐСзОЗеИЗжНҐгАВиѓ•дњ°еПЈдЄНдљЖеЬ®е§ЦйГ®зЪДйАЖеПШзФµиЈѓдљЬзФ®дЄЛпЉМжИРеКЯеЬ∞еѓєUSM45зФµжЬЇињЫи°МдЇЖй©±еК®еТМжµЛиѓХпЉМињШеПѓйАЪињЗе§ЦеК†дЄУзФ®зЪДL298NеЮЛй©±еК®иКѓзЙЗжЦєдЊњеЬ∞еЇФзФ®дЇОж≠•ињЫзФµжЬЇеТМзЫіжµБзФµжЬЇзЪДй©±еК®дї•еПКж≠•ињЫзФµжЬЇзЪДи∞ГйҐСи∞ГйАЯеТМзЫіжµБзФµжЬЇзЪДPWMи∞ГйАЯгАВ












 editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006