
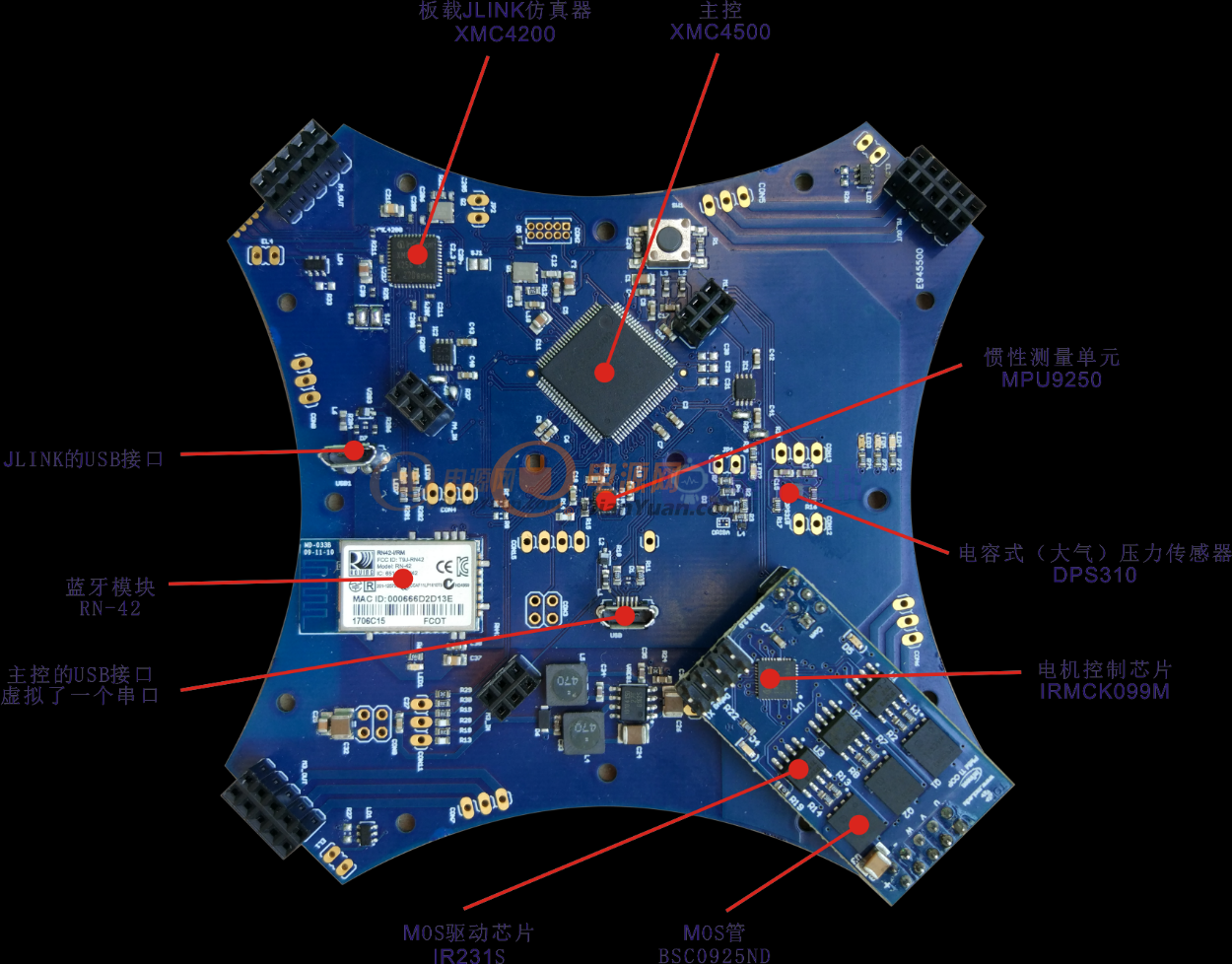
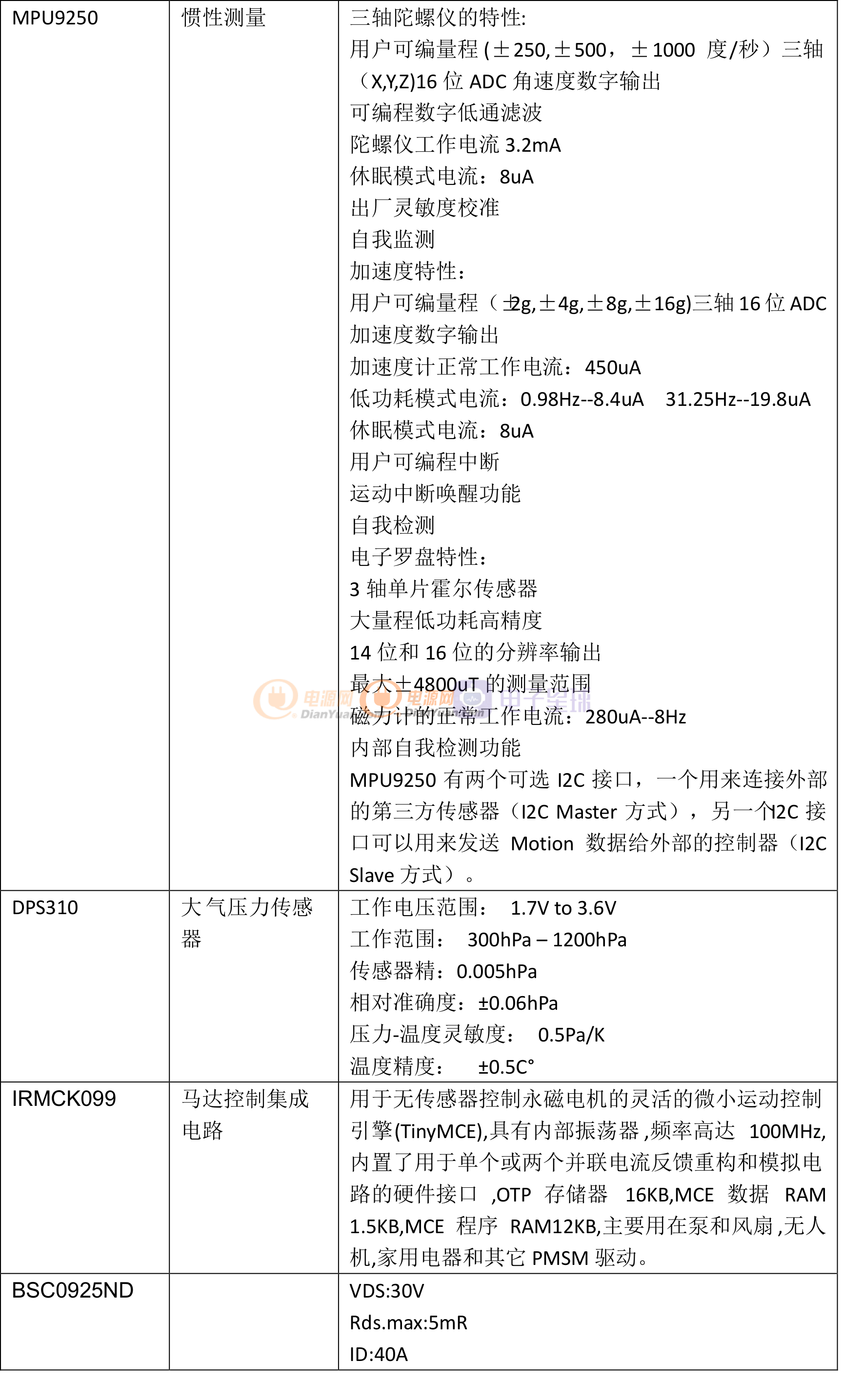
英飞凌最新无人机套件拿到手里已经1个多月了,下面说一下我的试用体验:套件用小工具箱包装,整体感觉比较高大上。不过确实如此,主控板使用了4层的PCB设计。这对于元件布局布线和抗干扰有相当大的帮助。英飞凌的芯片以前从未用过,拿到手后,对照数据手册和实物认真研究了一下。

提起飞控,不得不提Cleanflight软件,一个谷歌浏览器的插件,专门调试飞控的上位机软件。正好套件中有XMC_Cleanflight-master的源代码,就用它作实验了。
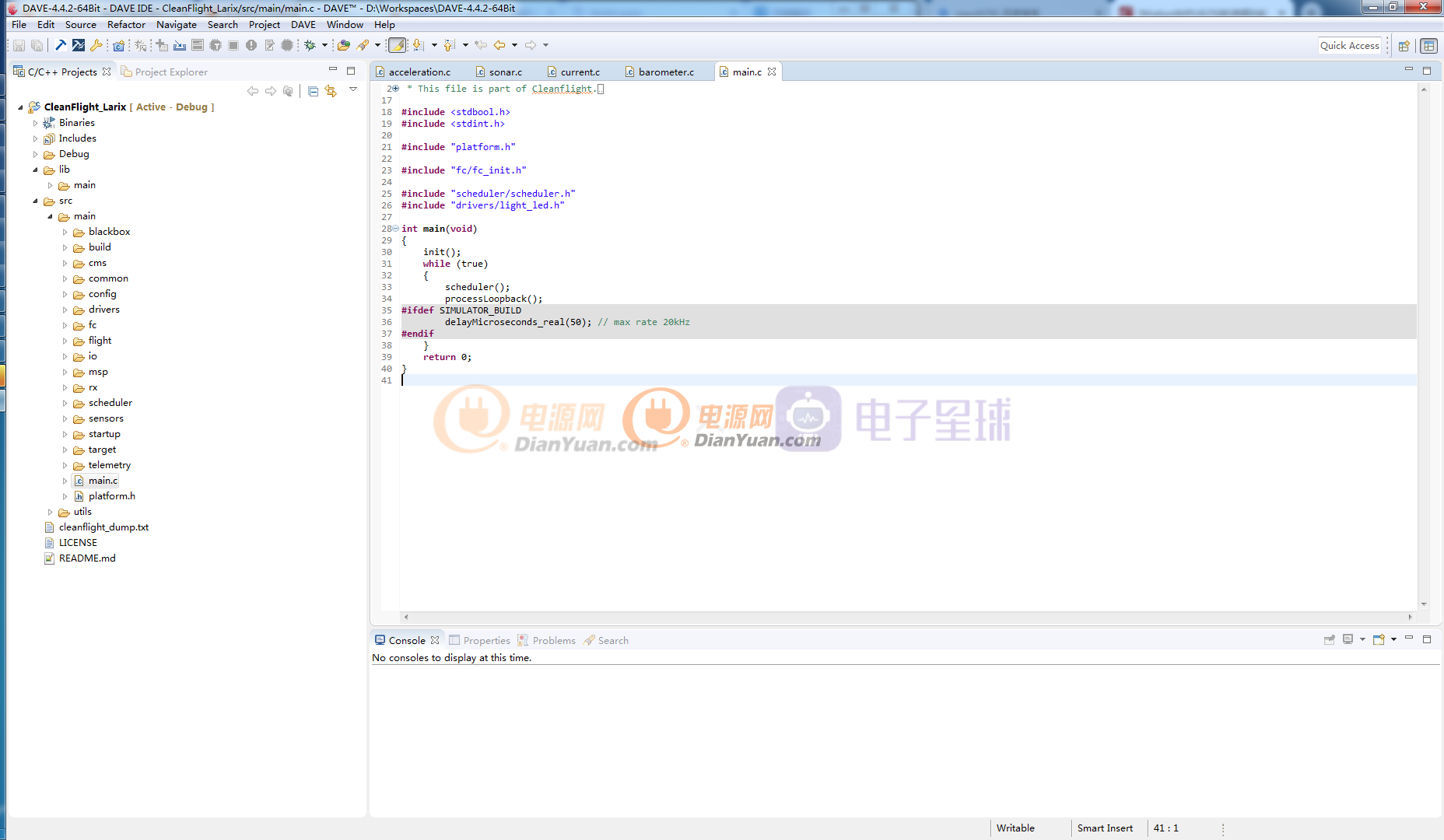
芯片程序的编译:英飞凌芯片的编译要使用DAVE集成环境。一个基于ECLIPSE的二次发开发环境,官方网站上可以免费下载。一开始用套件U盘提供的程序编译,提示出错,在使用其它试用者colin111111的程序后顺利编译。这可能是U盘中病毒了或者小批量时,复制源代码时出了错。管它呢,反正解决了。
芯片程序的下载:主控芯片XMC4500支持串口下载及仿真器下载。但是如果配置成串口下载就要使用仿真器的两个下载引脚,仿真器已经集成到上面了占用了这两只引脚,所以只能仿真器下载。我就吃了上面的亏,没有认真研究原理图。刚开始下载了Memtool串口下载软件,屡战屡败。后来转变思路下载了XMCFlasher,配合板载JLINK完美下载。

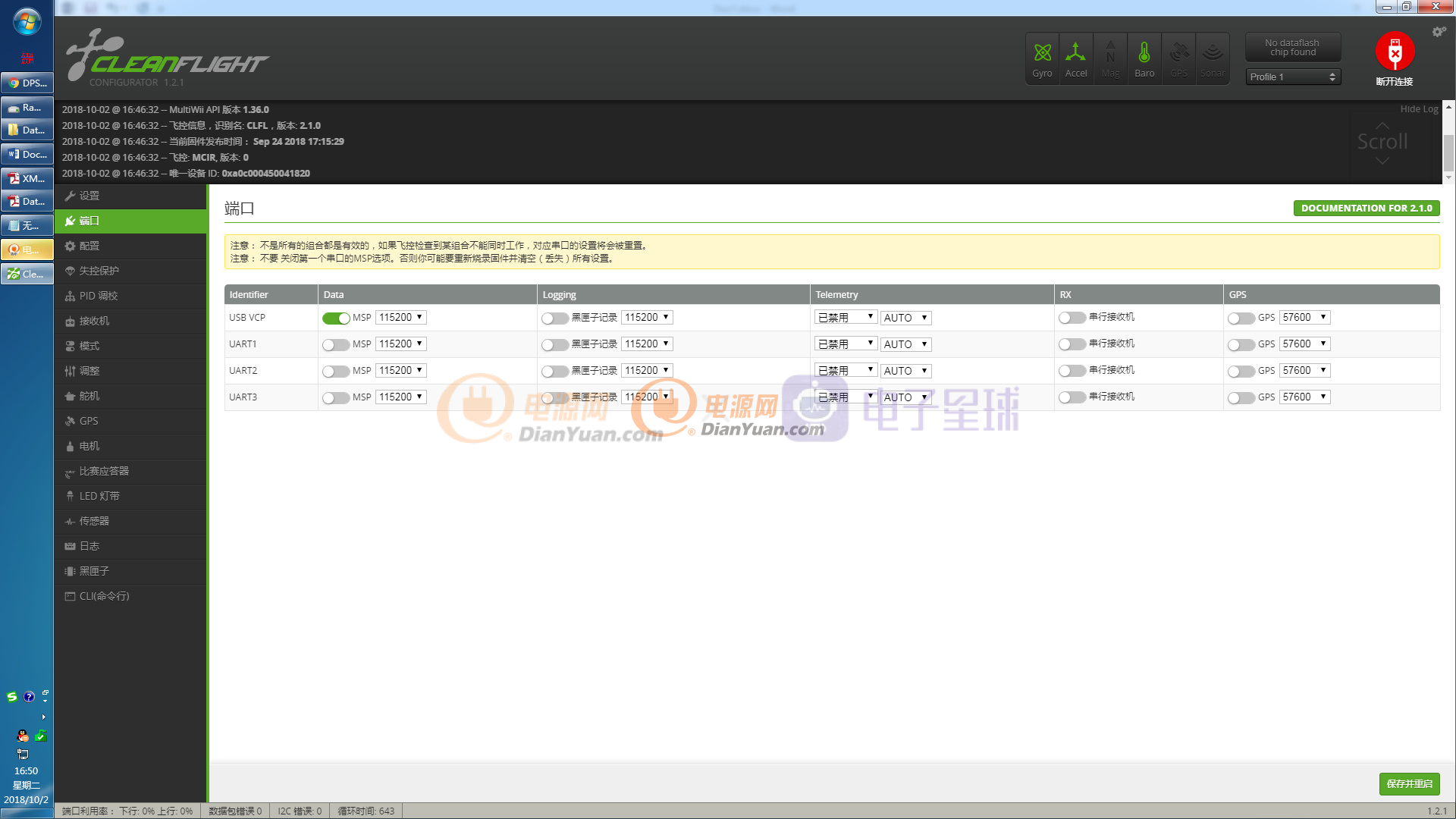
Cleanflight插件碰到的问题:Cleanflight软件需要翻墙才能下载使用,我下载的是国内网友的打包版本。可是问题来了:能联通串口,软件界面没有任何反应。不得不改它的源代码。

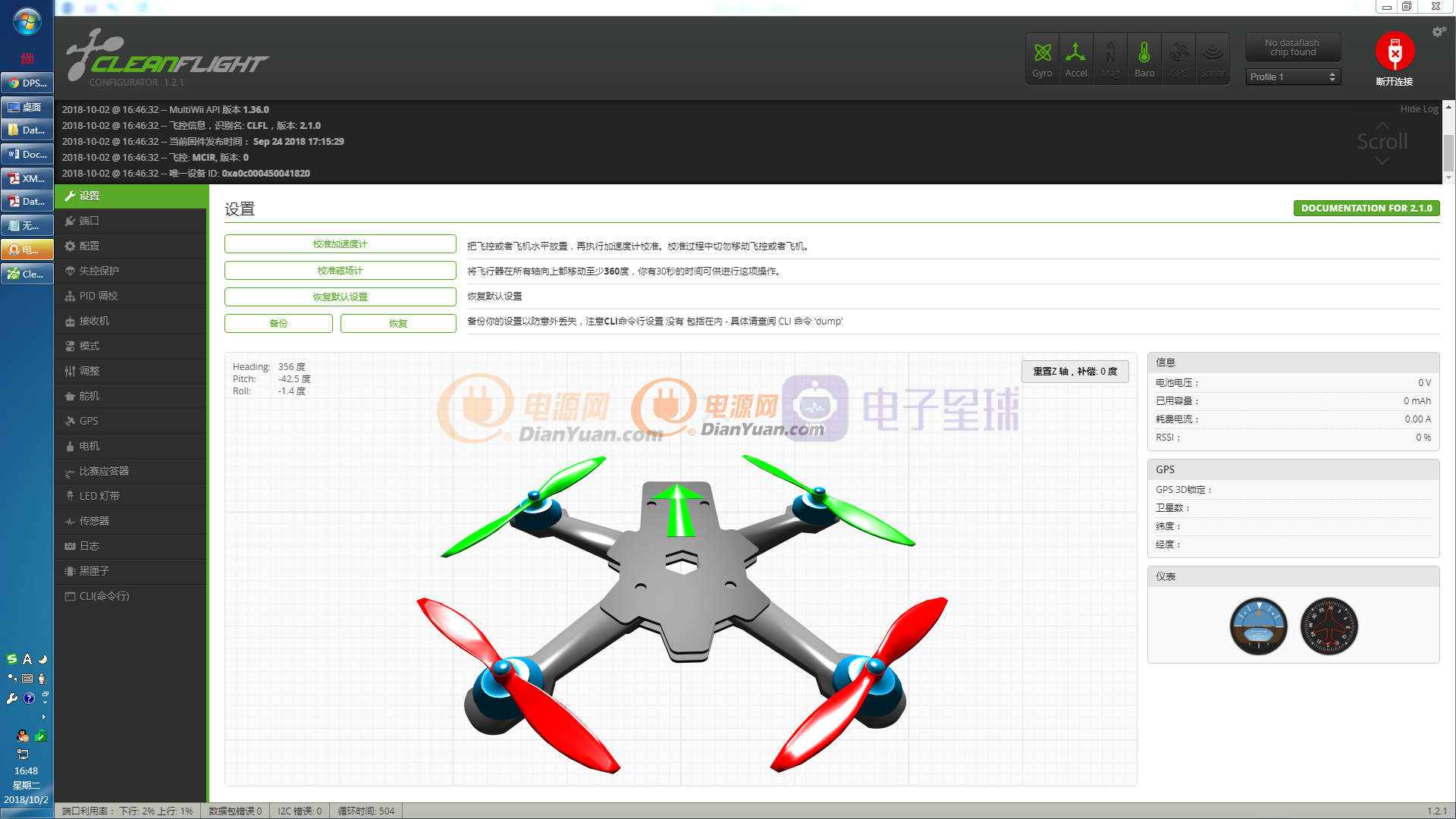
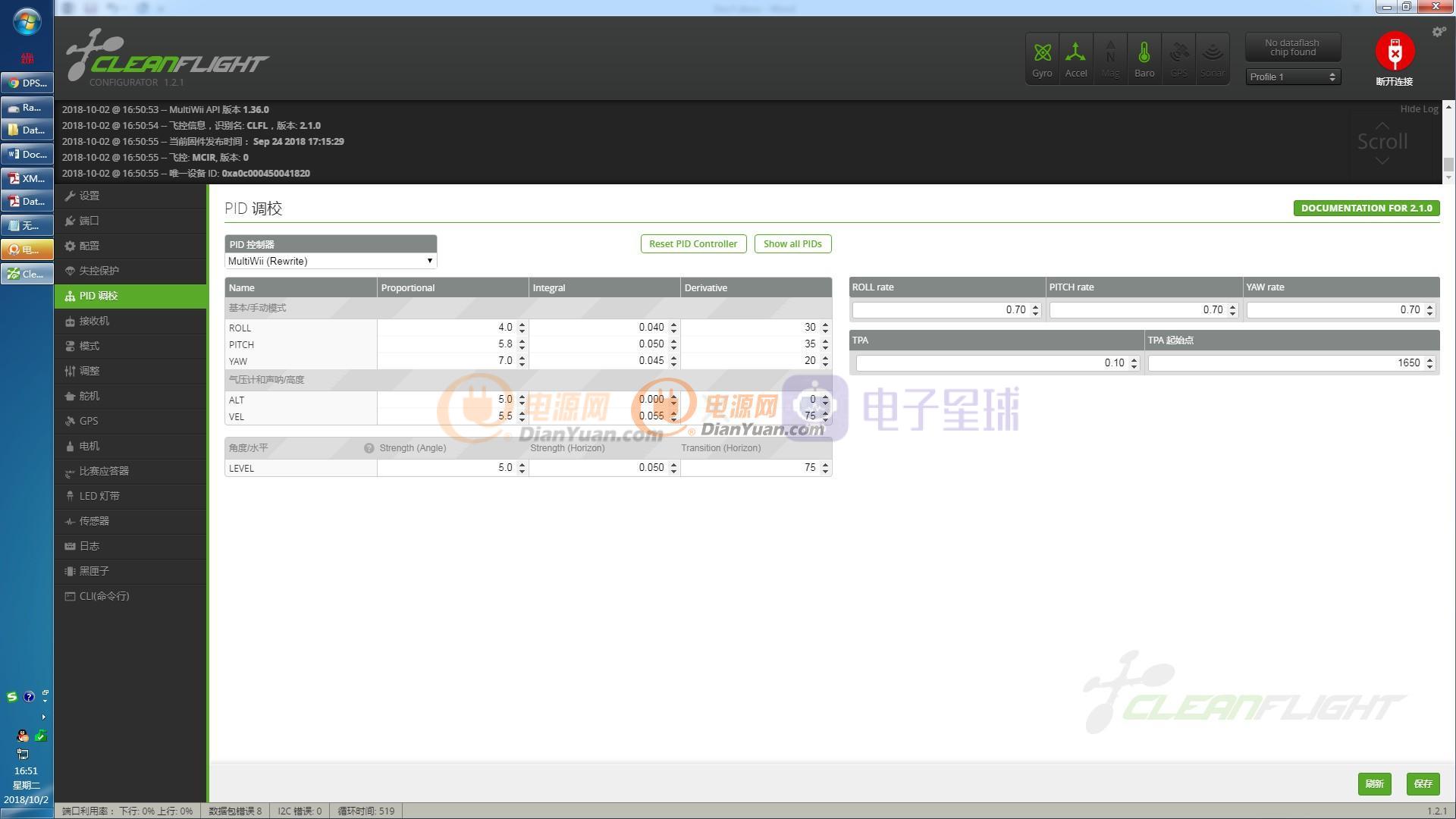
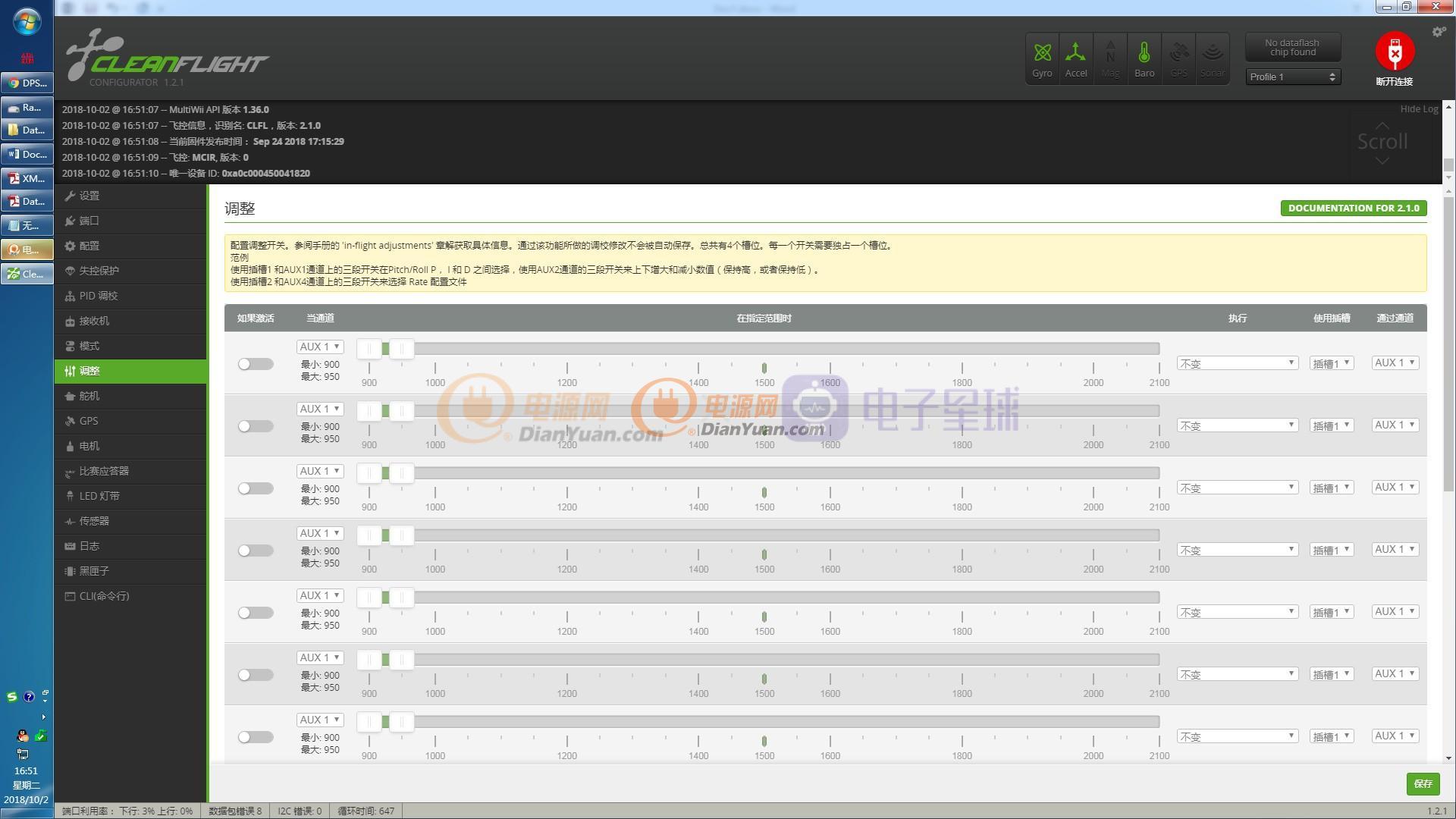
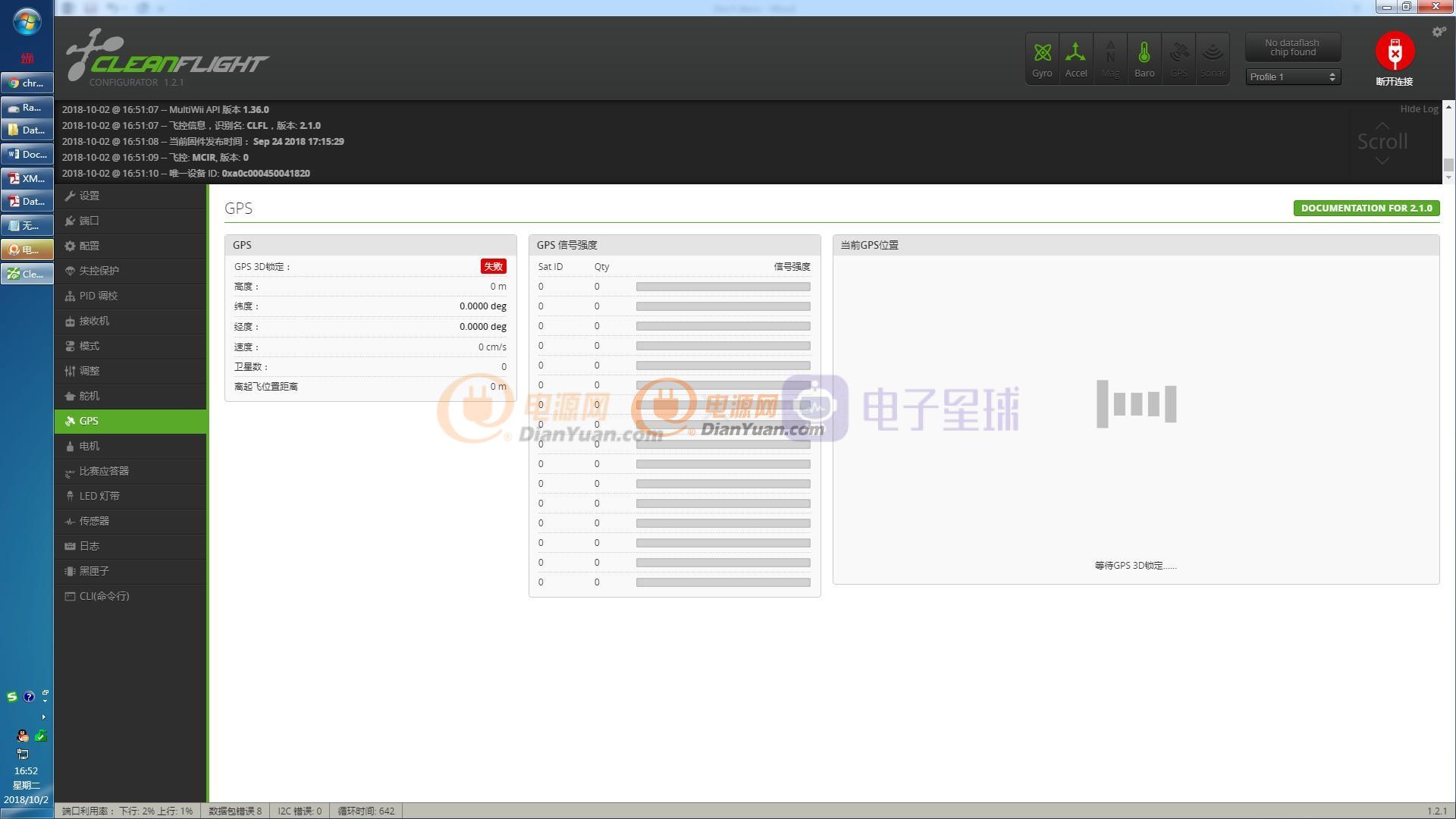
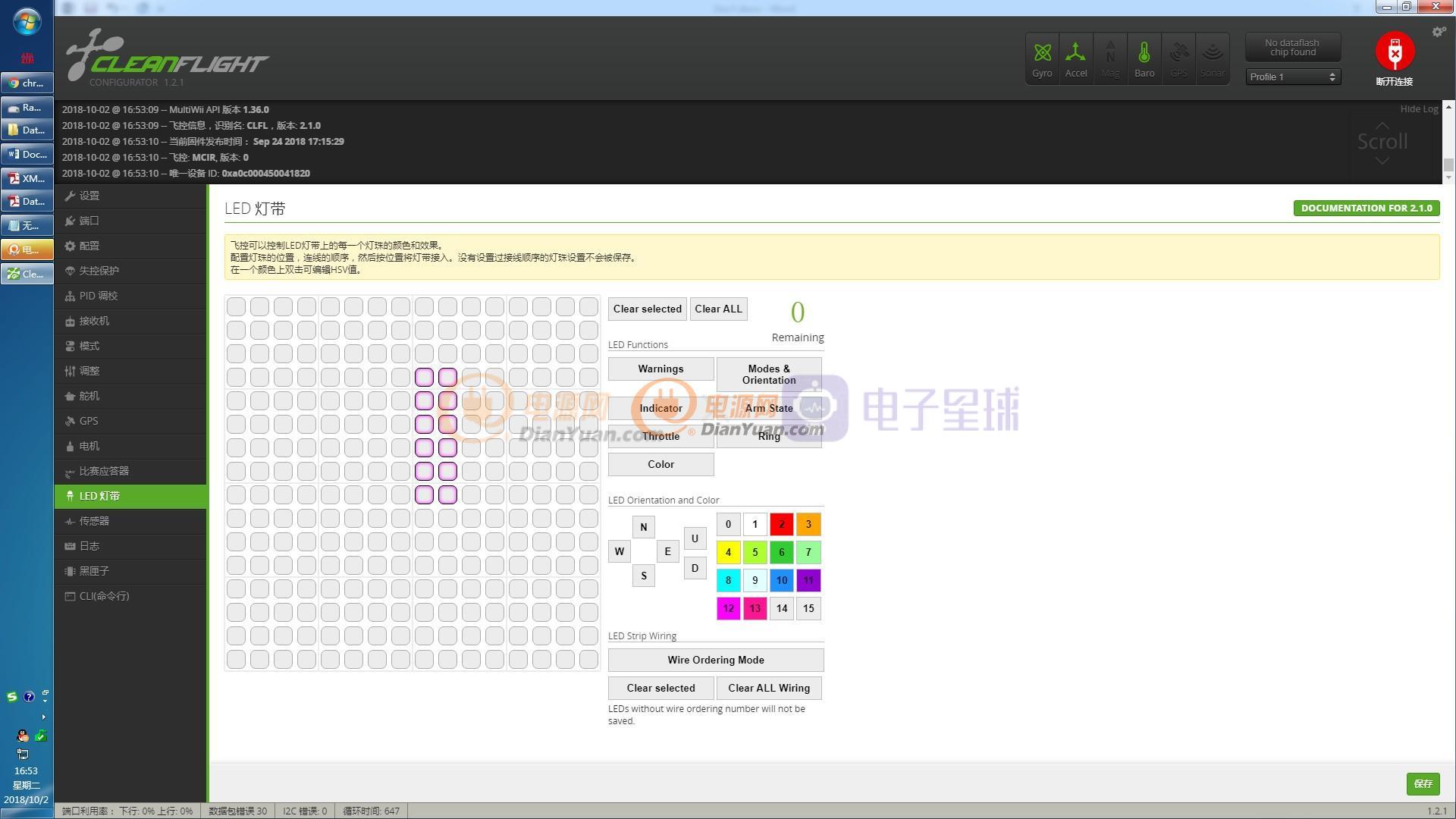
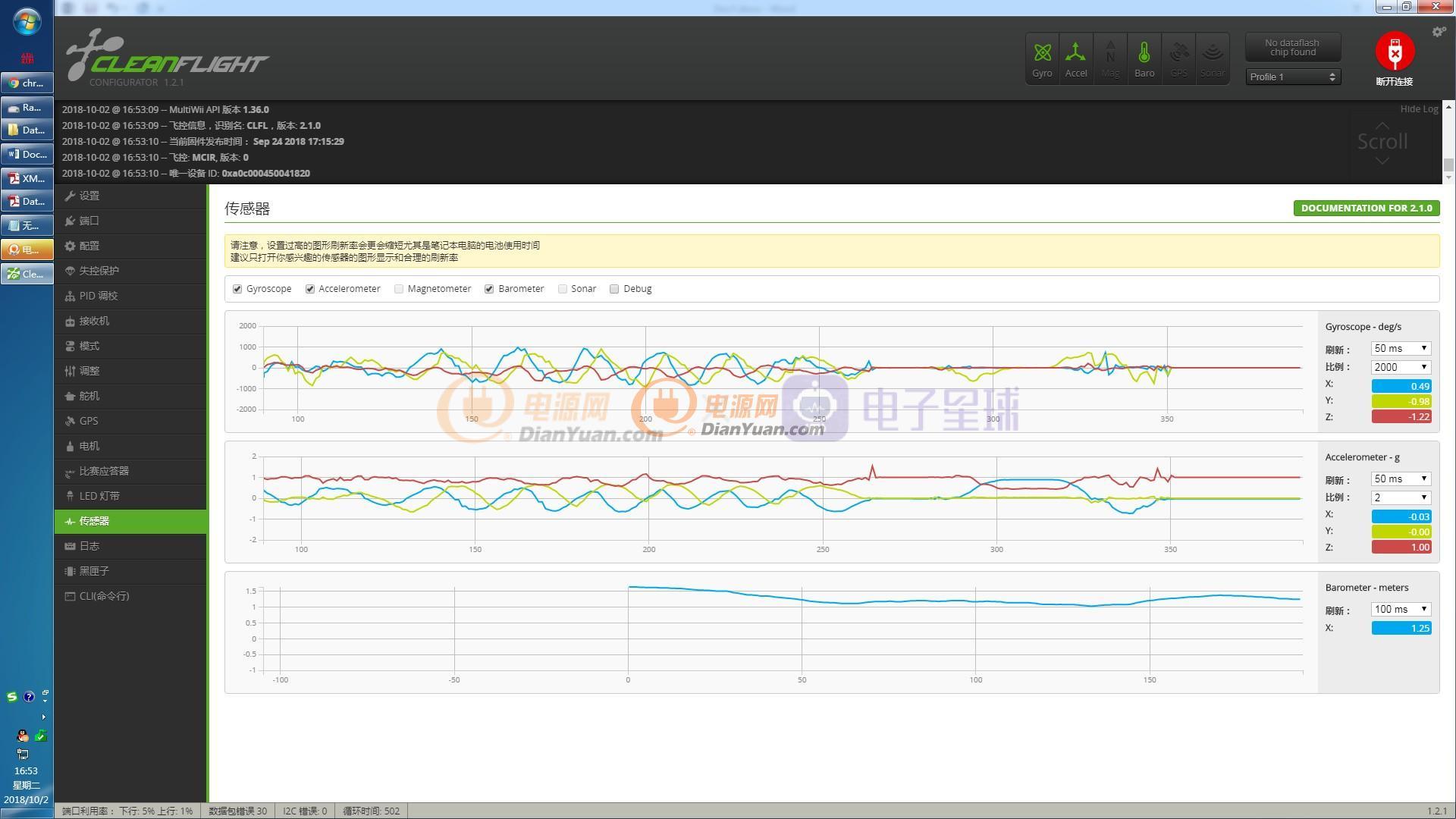
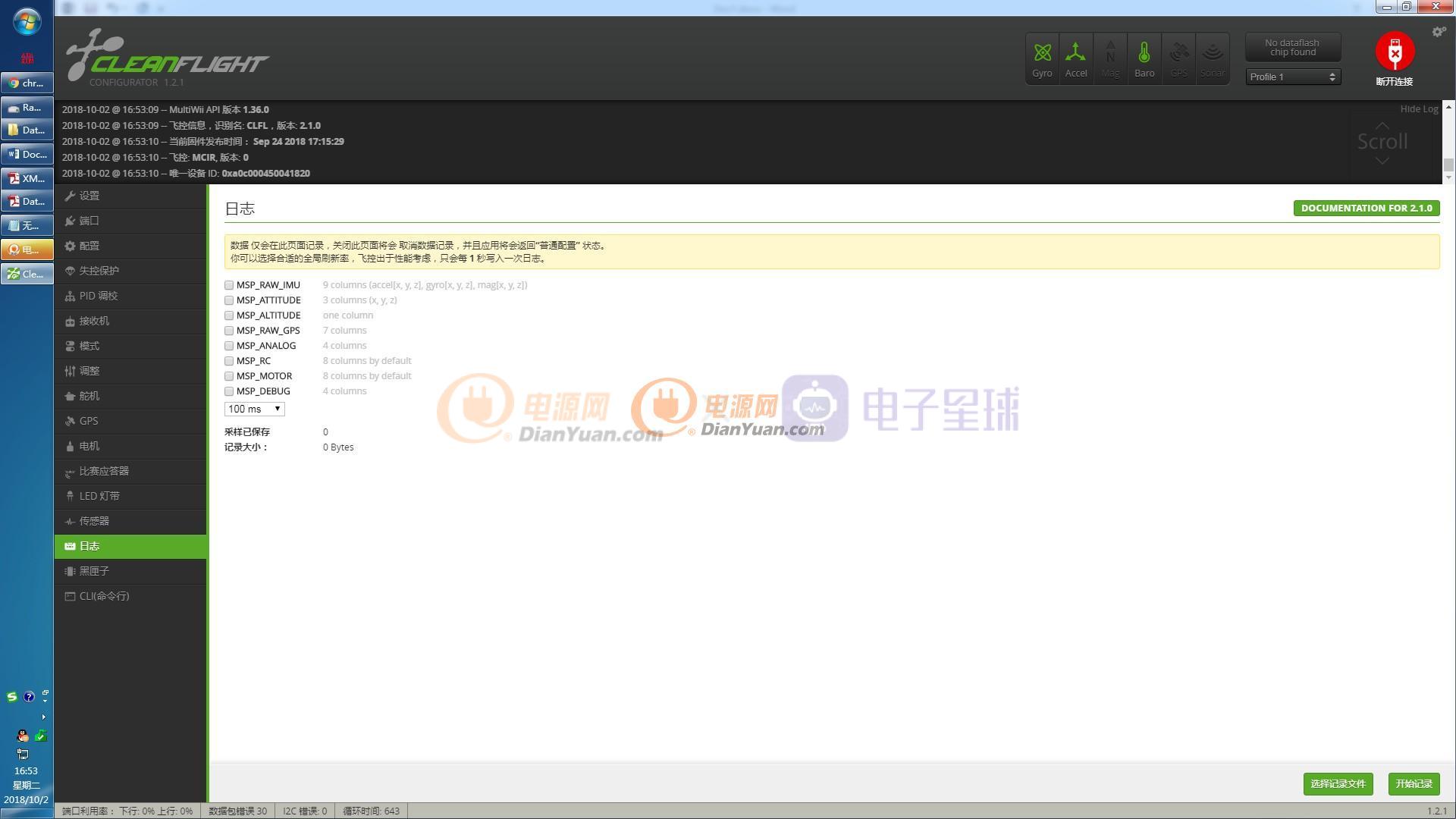
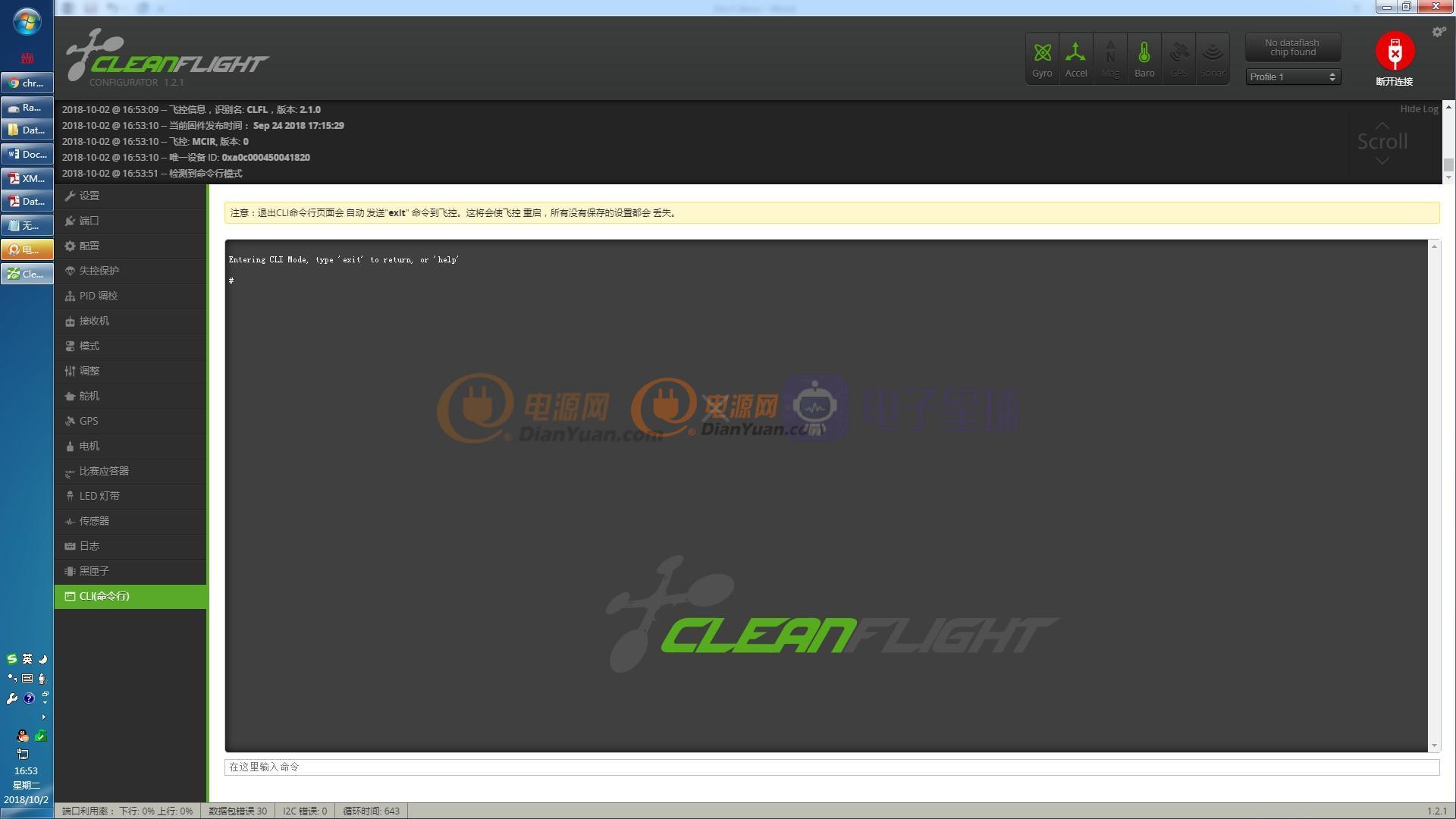
其原因是:默认CONFIG.multiType=0,所以-1后数据溢出了。套件是四轴飞行棋,我直接改了‘quad_x’了。当然改CONFIG.multiType是最好的方法。我有些懒惰。可能会有潜在问题。改成quad_x后,显示的就是四轴飞行器3D模型。打开上位机后,操作界面如下图所示:


具休芯片和程序还没有研究透,因为程序实在是太大了。不过英飞凌写的程序结构非常好,适合模仿借鉴。这个以后新开一贴详细介绍。
更多无人机方案请参考网址:http://www.dianyuan.com/infineon
 雅兄厉害!
雅兄厉害!
