感谢电源网的璐璐推送了【我的毕设作品】这个活动,感觉很有意义,已经毕业几年,当时的毕设内容和工作内容是一样的,所以想简单聊聊这几年的理解。毕设集结了在大学时几年的精华,单单上传一篇毕设就结束感觉挺浪费的,主要还是探讨下理论知识以及设计中的一些难点吧。其实回过头想一下,当年写的论文和做的东西还有很多缺陷的,甚至还有一些错误,如果能拿出来和同行从业者讨论一下,也很是很有趣的。


感谢电源网的璐璐推送了【我的毕设作品】这个活动,感觉很有意义,已经毕业几年,当时的毕设内容和工作内容是一样的,所以想简单聊聊这几年的理解。毕设集结了在大学时几年的精华,单单上传一篇毕设就结束感觉挺浪费的,主要还是探讨下理论知识以及设计中的一些难点吧。其实回过头想一下,当年写的论文和做的东西还有很多缺陷的,甚至还有一些错误,如果能拿出来和同行从业者讨论一下,也很是很有趣的。
微逆的特点是一块光伏板对应连接一块微逆,商业化的单路微逆功率一般为250W~300W,这也是造成成本高的原因,个板子上至少300以上的元器件,能不贵么?但是这样的好处是具有独立的最大功率点跟踪(MPPT),可以最大化的利用光伏板的电能。现在为了降低成本,一些微逆厂家已经做出了4路独立MPPT,功率在1200W的大个头微逆了,功率等级快赶上小功率的组串逆变器了,其实质上是相当于将4个单板微逆集成到了一起,这样可以连接4个光伏板。从单路到双路,然后是4路,不知道以后会不会有6路、8路或者更多路输入,逐渐组串化发展?!所以,简单说下单路的微逆,也就能对双路和四路有所了解了。
微逆为什么要用用反激拓扑?
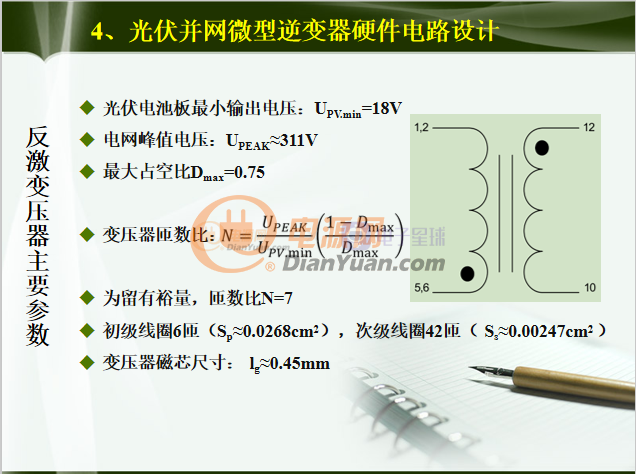
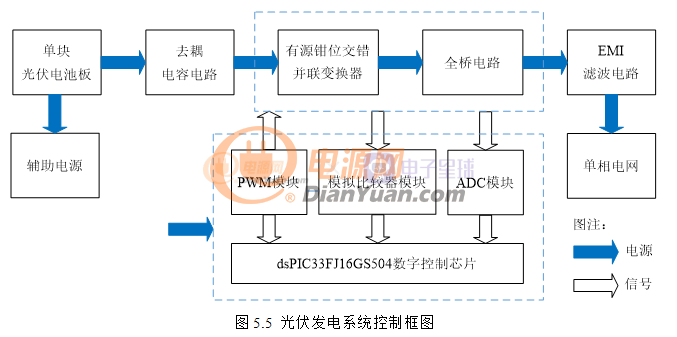
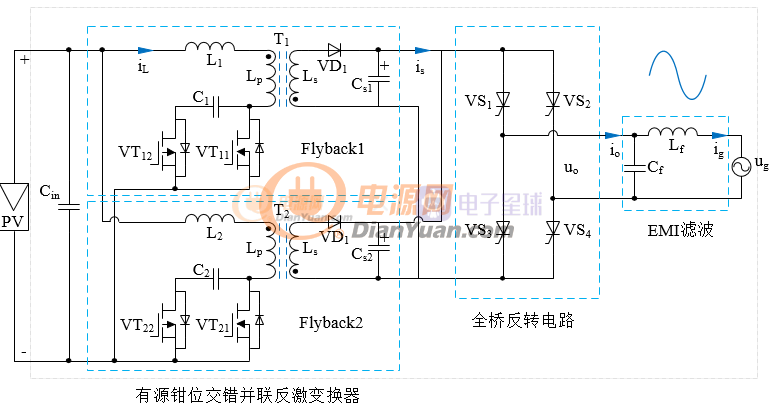
微逆是一个电流源,控制并网电流向电网输送电能,组串和集中式光伏逆变器是一个电压源并网。反激式拓扑如下图所示,主要包括输入端的光伏电池板、反激变换器、全桥反转电路、EMI滤波电路和电网组成:

微逆的主要控制算法就是在反激变换器(FLYBACK)这个环节实现,因此研究微逆的重点应该放在此处。
反激式微型逆变器拓扑电路中的反激式隔离变压器为周期性工作模式,可根据变压器磁通是否连续分为断续导通模式(Discontinuous Current Mode,DCM)、连续导通模式(Continuous Current Mode,CCM)和临界导通模式(Boundary Current Mode,BCM)三种模式。当反激变换器工作在DCM时,具有电流源特性,CCM时具有电压源特性,BCM是介于DCM和CCM的一种特殊模式,工作在BCM时也具有电流源特性。因此作为电流源,反激拓扑的微逆会将反激变换器设定在DCM和BCM两种工作模式下。
我们知道开关电源中,反激拓扑的电能转换效率一般不高,而微逆想在市场上具有竞争力,就需要有高效的电能转换效率,使用反激拓扑采用的控制策略是将该拓扑看成一个准单级,并且反激变换器的开关管使用ZVS,以降低开关损耗。微逆采用反激拓扑还有一个原因是需要小体积,且尽可能的降低硬件成本。
为什么用交错并联反激方式?
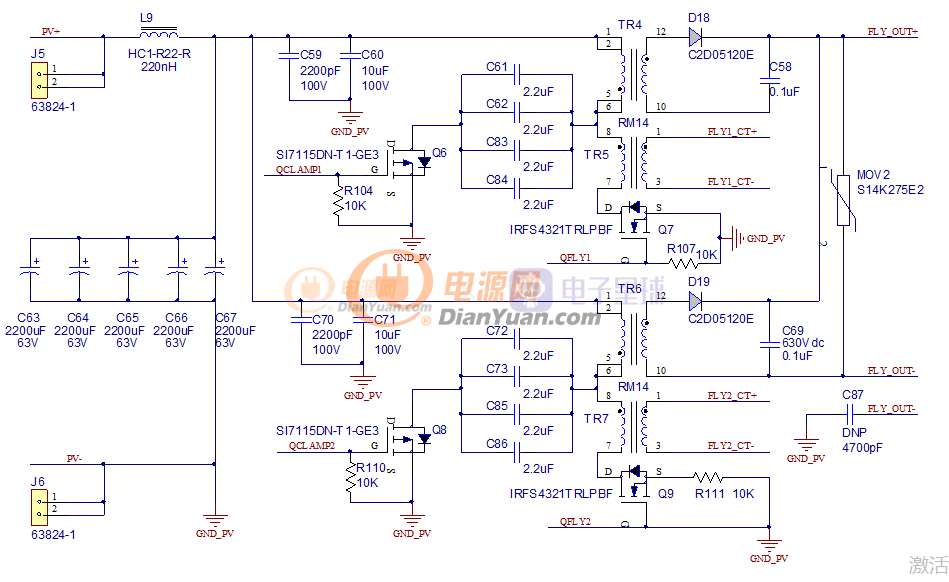
单端反激式变换电路的输出端纹波电压较大,因此限制了输出功率,该拓扑结构多用于较小功率范围的电路中。为提高反激变换电路输出功率,改善电路的纹波现象,交错并联反激式变换电路应运而生。交错并联式拓扑结构是在单端反激式拓扑结构基础上,将两个单端反激电路并联,该拓扑结构能减小输入端开关器件的电流应力,输出电流是两个单端反激电路输出电流的和,同时输出端电压保持不变,因此可以提高系统的输出功率。反激式变换电路输出的峰值功率等于并网逆变器输出的峰值功率,采用交错并联方式时变压器的峰值功率能成倍减小,从而减小变压器的体积和磁芯损耗。另外,交错并联反激式拓扑结构还可降低系统输出电流谐波、减小输出端的滤波电路设计、减小系统装置体积、降低硬件设计成本。
激变换器的特征是:当开关管导通时,反激变换器储能;当开关管关断时,反激变换器释放电能。那么在同一个开关周期内,将两个反激变换器交错并联:FLYBACK1导通时,FLYBACK2关断;FLYBACK1关断时,FLYBACK2导通;这样在一个开关周期内,时时刻刻都有能量从原边输送到副边,单端反激变换器一般功率在100W~150W,通过这种交错并联方式直接将输出功率翻倍,因此大大的提高反激变换器的功率密度。
在反激变换器中加入了有源钳位电路:有源钳位电路的原理是利用变压器的电感电流短时间内不能突变的特性,来抑制开关器件的电流上升率,再利用电容电压短时间内不能突变的特性,来抑制开关器件的电压上升率,钳位电路可以抑制尖峰电压和尖峰电流,减少开关器件损耗,提高系统转换效率。
微逆的控制的核心算法有哪些?
微逆的控制算法主要是三大块:峰值功率控制、最大功率点跟踪(MPPT)和锁相环,三者紧密相连,共同组成了准单级反激式光伏并网微型逆变器。由于微逆需要处理的数据较多,因此需要选择高性能的DSP,常见是常见选择的是TI或者FREESCALE的32位DSP,有的直接选择使用FPGA。
DSP/FPGA将硬件电路检测到的电网电压进行D/A转换,使用软件锁相环实时运算,将检测到电网的电角度θ、电网电压和频率,最关键的一环就是这个电网电角度θ,θ是用于计算反激变换器开关周期的关键参数。
因为反激变换器开关周期表达式TS是:
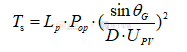
其中,Lp是反激变压器原边感量、Pop是输出功率、D是占空比、UPV是光伏电池板输出的电压,以上这几个量是常数或者可以使用硬件电路检测得到。sinθG即是由电网电角度计算得到。
一个电网周期如下图:

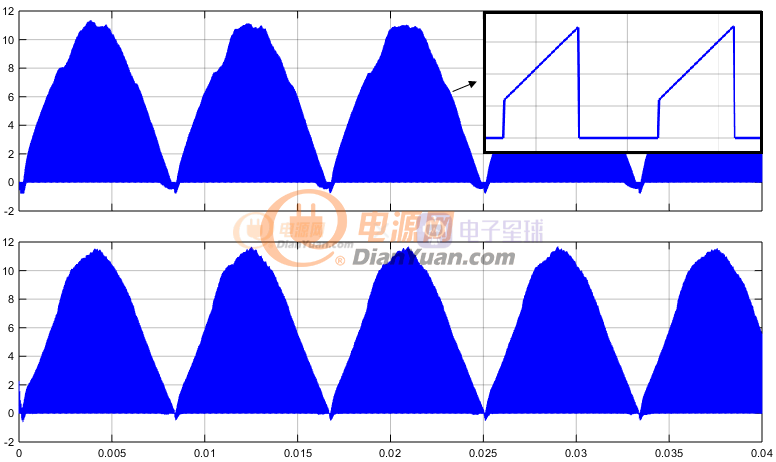
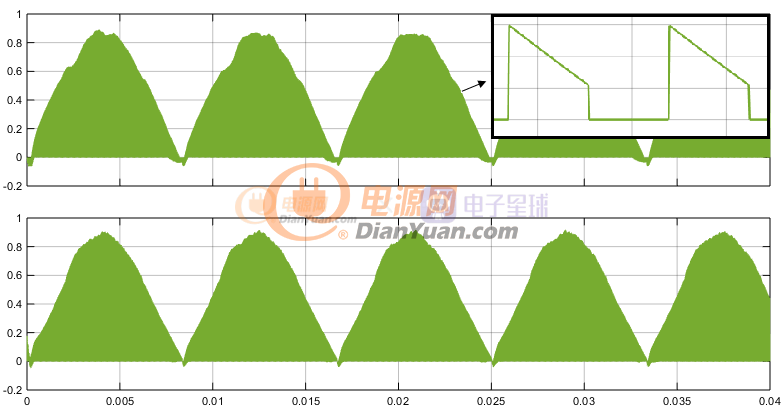
因此在一个电网周期内,不同时刻的电网电角度θ是不同的,那么反激变换器开关周期Ts也是跟随者变化的,所以反激变换器输出的电网半个周期的电流波形呈现为“馒头波”,其包络线就是正弦半波,如下图:
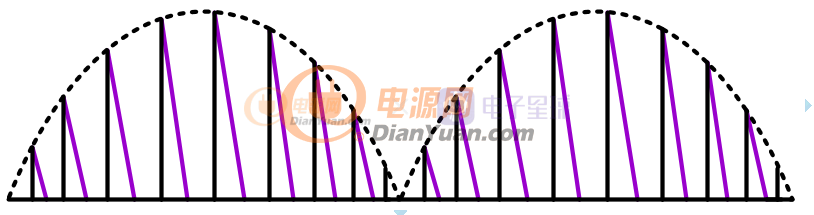
简单点说,就是半个电网的波形长什么样子,由电网电角度反馈到反激变换器的开关周期形成的包络线就长什么样子。
主要控制波形如下图所示:UGS1和UGS2是交错并联反激变换器的开关控制波形,UG3(UG5)和UG4(UG6)是全桥反转电路控制波形,iD1和iD2是两个反激变换器的整流二极管输出的电流波形,uG是电网电压,iG是并网电流
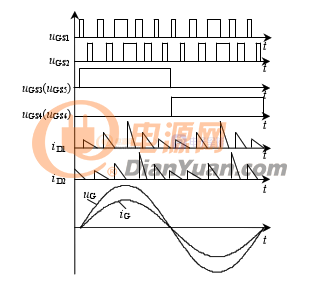
注:上图借用于网络,不是我自己画的,我之前画的比这个详细的多,但是笔记本换硬盘了,一时之间没有找到。
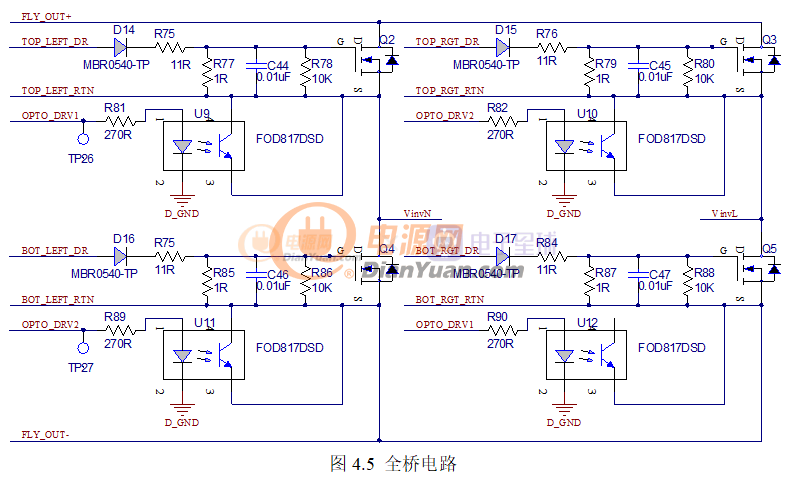
这个时候,全桥反转电路就登场了,反激变换器经过整流二极管输出的是包络线为正弦半波的馒头波,此时通过一个工频(50Hz/60Hz)控制,在两个馒头波的交接处(就是过零点的地方)进行反转,即可将正弦半波反转为标准的正弦交流,PWM也就是上图中的UG3(UG5)和UG4(UG6)。
4
最大功率点跟踪:
最大功率点跟踪的目的是:将光伏电池板上的电能,最大化的送给光伏逆变器。由于光伏电池板不是电流源也不是电压源,表现光伏电池板主要特性是曲线如下图:
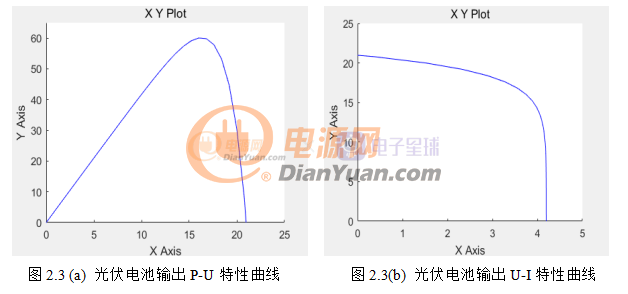
决定光伏电池板输出的电能大小的因素中,光照强度是影响最大的因素,因此光照好的时候自然发电也最多,其他影响光伏发电量的还有温度、湿度和海拔等。但是,总会有阴天、多云或者其他天气状态存在,还有建筑物和树木遮挡,鸟粪、污点和粉尘等,这时就需要使用到了MPPT。在任何时刻,有且仅有一个点使得光伏电池板输出功率最大,即是PPV=UPV×IPV。
常见的MPPT算法有恒定电压跟踪法、电导增量法和扰动观察法,还有像神经网络、模糊控制和电流扫描法等。常见的,而且用于商用的MPPT是观察法居多,或者在扰动观察法进一步优化的算法。
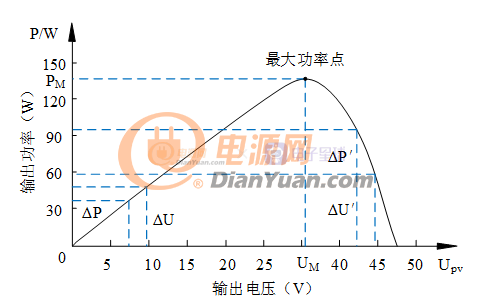
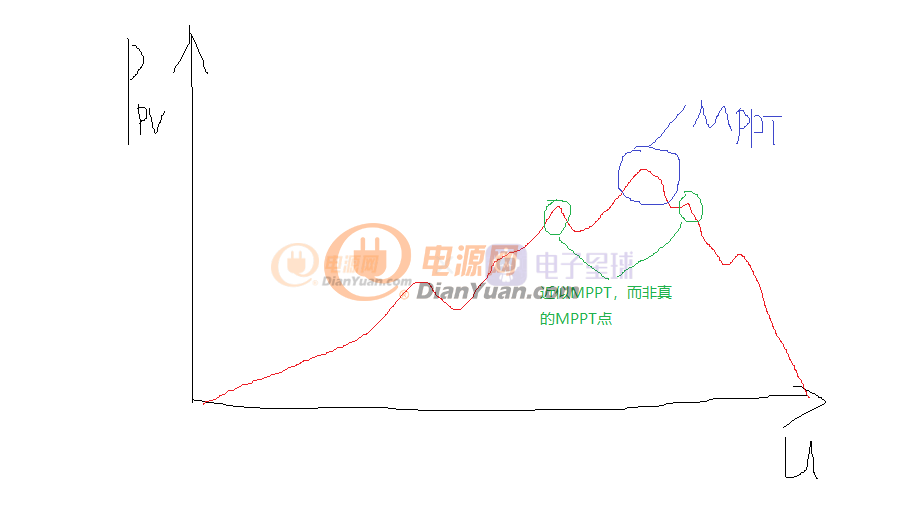
简单点说,就是计算某时刻的PPV,然后和下一时刻的PPV做对比,看看这俩值的大小,然后左右移动,不挺的计算对比,一直移动到两个差值非常接近的时候,就是最大功率点了。不过这种方式的弊端是,如果有两个以上峰值时,可能会掉落在近似最大功率点上,而非真正的最大功率点。如下图:
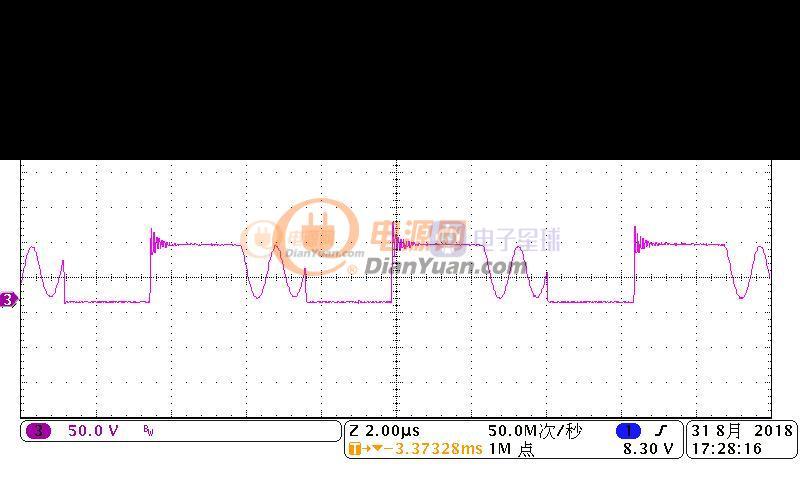
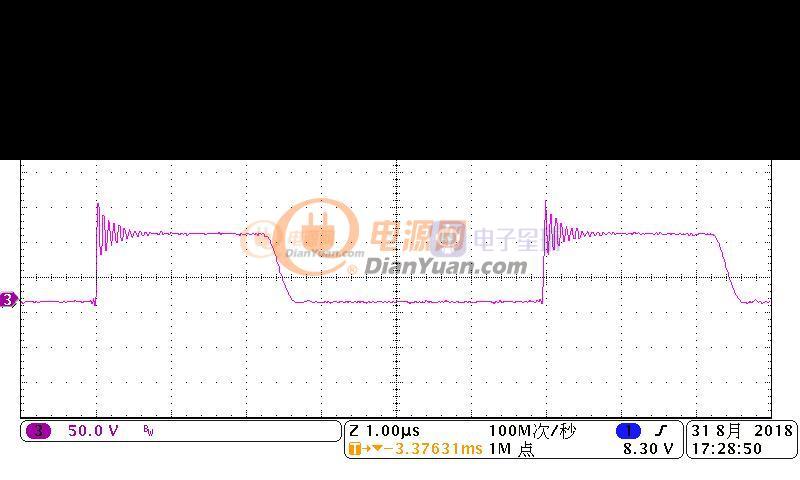
并网电流和电网电压的仿真波形如下图所示。
其中,红色的波形为电网电压,粉色的波形是逆变器输出的并网电流。
并网电流和电网电压呈现的是同频同相的状态,这时需要注意,根据国家相关规定,并网的电流总谐波含量(THDi)应该小于等于5%才允许并网。
否则,谐波太大了会对电网造成污染,而且也会损坏用电器。


 继续继续
继续继续