在上一篇的基础上实现恒压恒流输出
1)输出恒压恒流
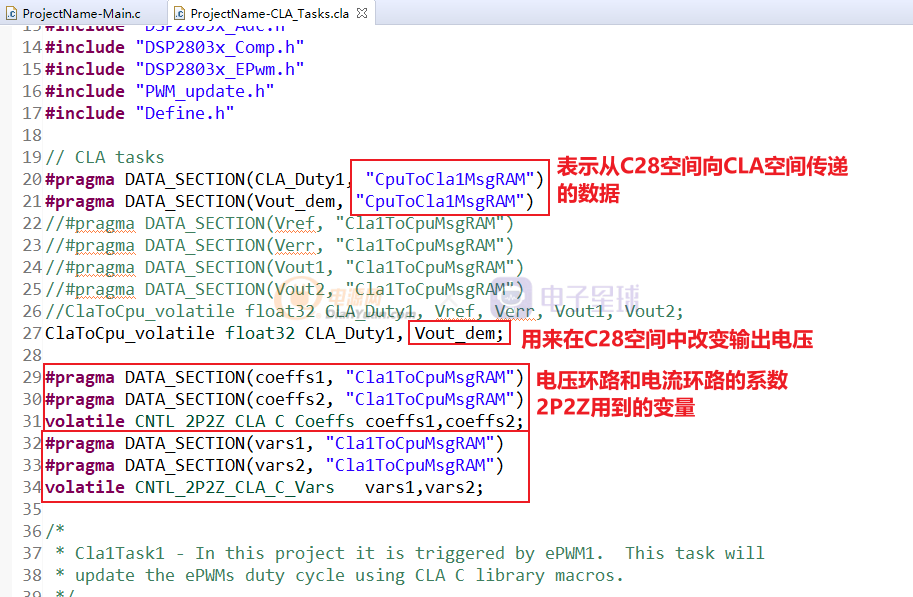
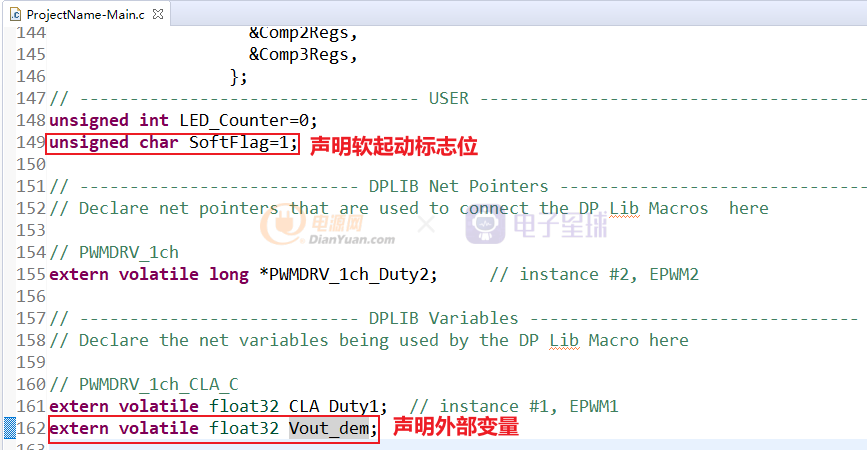
实现输出恒压恒流的控制算法都是在CLA任务中进行的,因为CLA内核与C28内核的RAM空间是相互独立的,不能相互访问。为了实现在C28程序中修改CLA的变量值,就需要将这些变量特殊的定义一下。
然后进入到CLA的任务1中。任务1由ADC的中断1触发,采样电源的输出电压,进行电压环路的计算。

任务2,进行输出电流环路的计算。

从控制模式可知,DAC的输出值直接决定了PWM的实际占空比。
要在任务1中同时更新DAC1和DAC2,以确保在一个开关周期内左下桥臂与右下桥臂的占空比一致,防止变压器的初级产生偏磁。
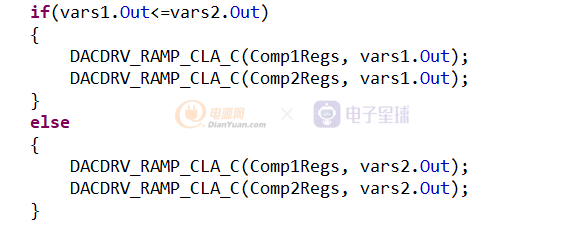
电压环路与电流环路计算出的值,哪个小,就用这个较小的值更新DAC,以实现输出的恒压恒流。
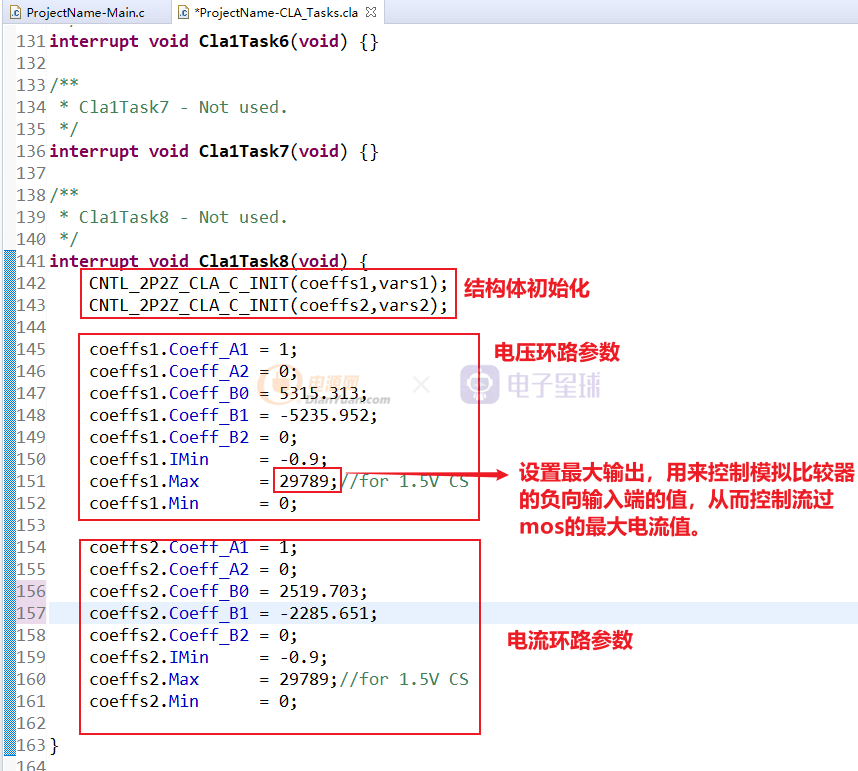
最后要将计算出来的差分方程的系数填入到任务8中,用来做2p2z结构体的初始化
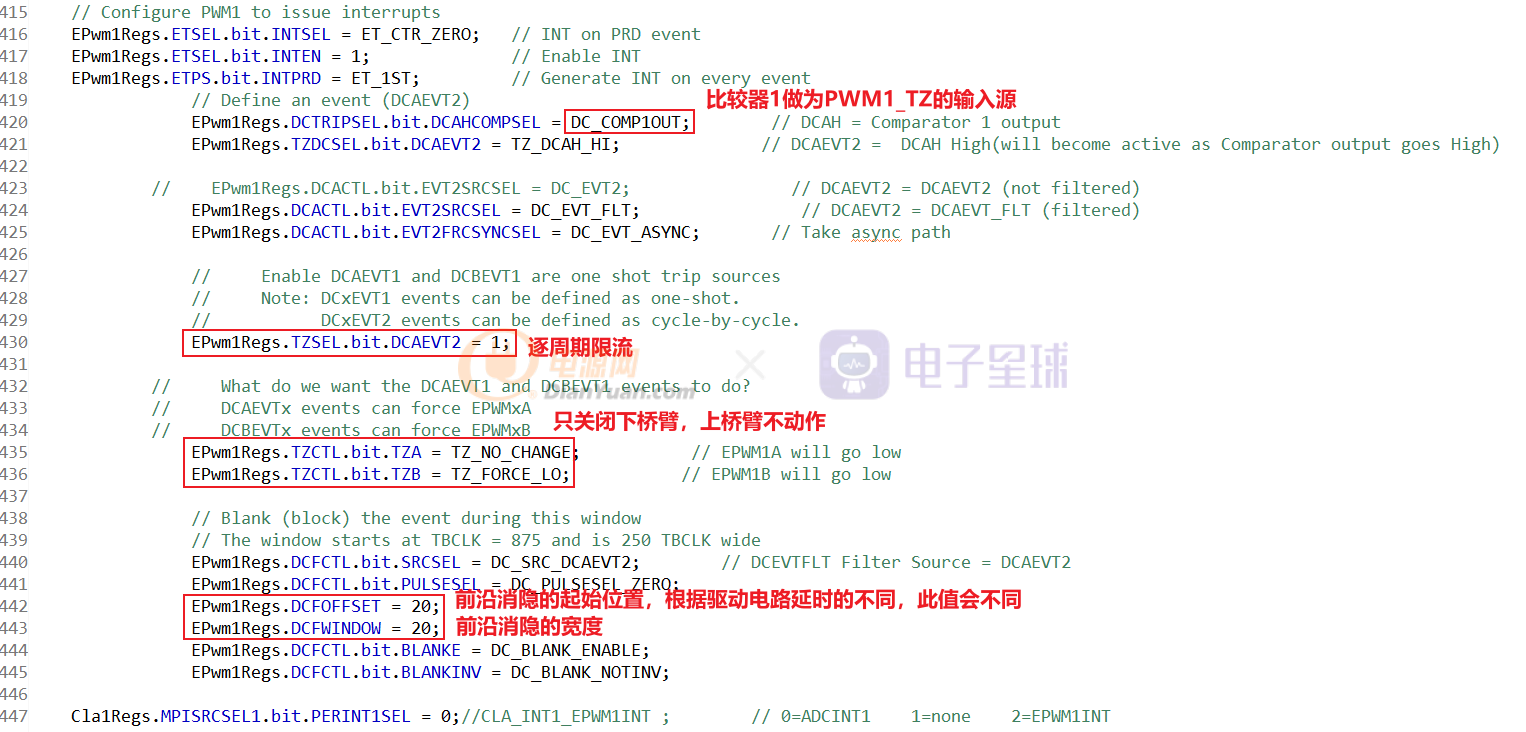
另外PWM和TZ也要配置,否则模拟比较器将不能控制PWM的占空比

2)软启动
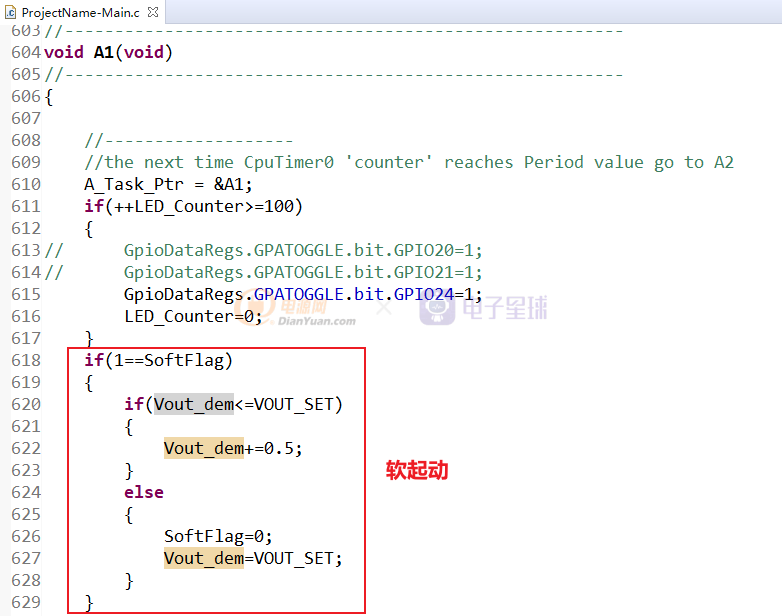
电源上电后的软启动也是必要的。通过缓慢增加输出电压设定Vout_dem这个变量的值,来实现软启动的功能。
然后在主循环中
3)急停功能
急停信号是通过GPIO29的状态来实现的,高电平关机,低电平开机。
关机可以用禁用PWM时钟的方式实现。

4)上电运行
当输入电压270V,输出电压300V2.5A的条件下波形如下:
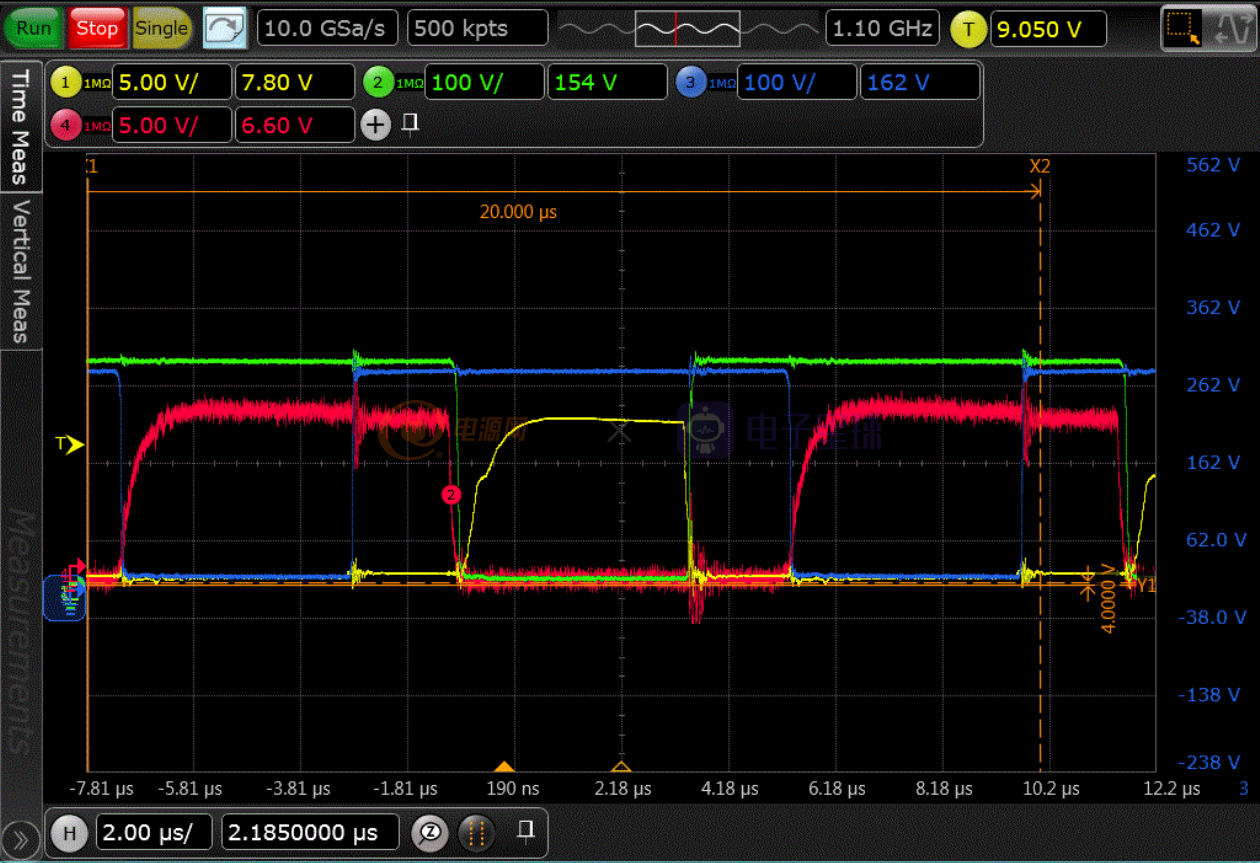
1黄色:左下桥臂MOS驱动波形
2绿色:左下桥臂MOS漏极波形
3蓝色:右下桥臂MOS漏极波形
4红色:左上桥臂MOS驱动波形
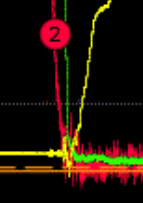
从上图中的细节可知,在左下桥臂MOS的漏极(绿色)降到0V后,左下桥臂MOS的驱动(黄色)才开始导通。所以在MOS开通的瞬间,MOS处于ZVS(零电压开通)状态,达到软开关的目地。

再来看左上桥臂的开通情况,从上图显示的细节分析,当左上桥臂的MOS驱动(红色)导通时,左上桥臂的源极(即左下桥臂的漏极,绿色)已经处于输入电压的高度,也就是说左上桥臂的漏源之间的电压为0V,所以左上桥臂开通时也处于ZVS状态。
笔者通过增减负载,发现在输出电流大于2A后,全桥变换器四个桥臂开通时都处于ZVS状态。负载小于2A,就会因为谐振电感电流不足以给左边上下两个桥臂的漏源寄生电容充放电,导致下桥臂开通时,下桥臂的MOS漏源无法谐振到0V,会导致MOS硬开关状态。
适当增加谐振电感的电感量,可以扩展软开关状态的负载范围。但是随着谐振电感量的增大,也会带来一些问题,比如,固定的磁芯如果要想增大电感量,只有多绕圈数,并还要保证磁芯不饱合,这样会增大磁损和线圈上的铜损。
综上所述:
isl6753的软开关拓普是定频PWM条件下,一种有效的降低MOS的开关损耗的电路。基于该电路拓普的数字电源在灵活性上要优于isl6753,后期还可以将次级同步整流功能代码加入到程序中。因为电源输出实现了恒流,在多模块并联时,能更好的实现均流控制,用通讯线替代均流信号线,简便性和抗干扰都要优于isl6753。
该拓普还有一个优点就是,在实现谐振软开关的同时可以用峰值电流控制模式,这对于负载是超级电容的情况是非常理想的一种控制方式。