
开关电源环路学习笔记4:两种误差放大器的传递函数
作者:硬件工程师炼成之路
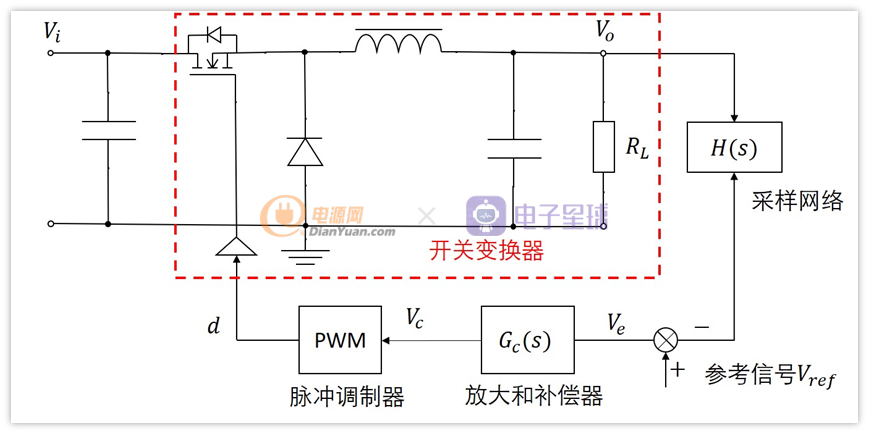
前面几节我们已经说明白了,在满足一定条件的时候,Buck开关电源可以看成是线性系统,并且可以是划分为4级的反馈控制系统。
上期回顾:系统框图
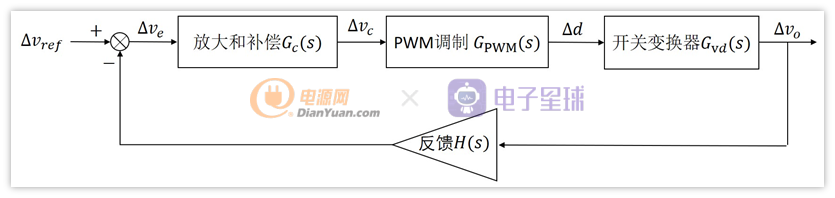
1、反馈级:H(s)
2、放大和补偿级:Gc(s)
3、PWM调制级:Gpwm(s)
4、开关变换级:Gvd(s)
我们要知道整体的传递函数,那么自然需要知道每一级的-传递函数,这一节就先来看反馈级和补偿级的传递函数。
反馈级H(s)和放大补偿级Gc(s)
这两级放到一起说吧,我们分析系统稳不稳定,就要分析开环传递函数T(s)。
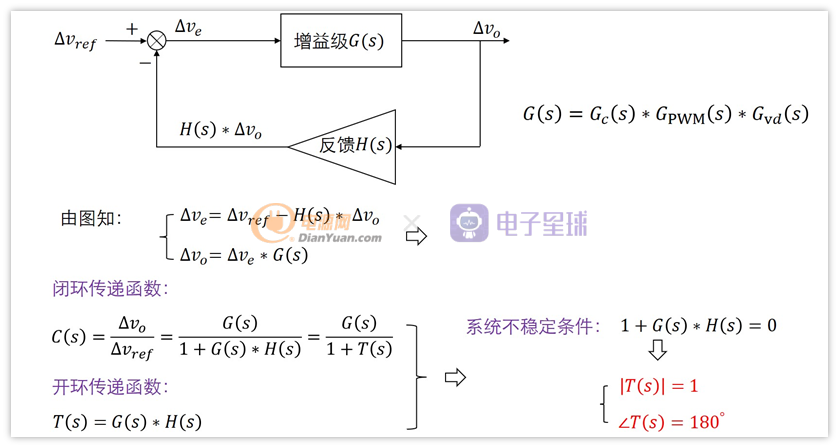
而T(s)等于四级相乘:
T(s)= H(s)*Gc(s)*Gpwm(s)*Gvd(s)
另一方面,反馈和补偿很多时候是揉合在一起的,所以把H(s)和Gc(s)放到一起,求整体H(s)*Gc(s)就可以了,这样更方便计算。
一个问题
Buck我相信每个人都用过,而且应该都会见过下面电路的R3和C3,它们是用作环路补偿的。

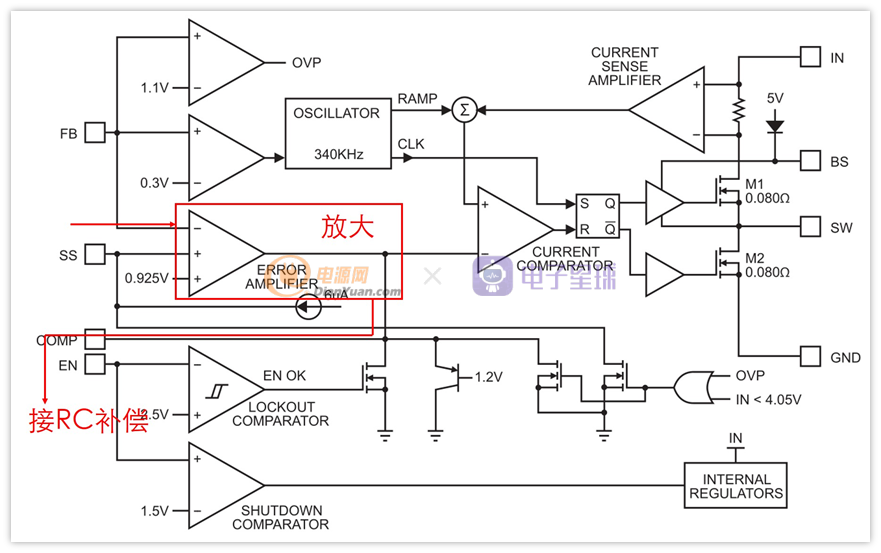
可以看到,上图的补偿电阻和电容的一头都是接地GND的。
另外,我们也会看到一些环路补偿的资料,比如下面的三种补偿……【继续阅读】
负载电流控制频率反走DCM CRM混合PFC的控制策略实现与思考
作者:杨帅锅
CRM的PFC在轻负载下存在开关频率变高,带来开关损耗和磁损耗的问题。虽然有最高频率钳位的DCM/CRM混合控制方法,可见:《频率钳位的CRM/DCM PFC控制方法学习和思考》。目前还有一种方法,那就是负载电流控制频率反走DCM/CRM混合PFC的控制策略,在安森美的NCP1612上就是使用这种控制方法,可以最大程度提升在10%,20%的负载点上的效率。
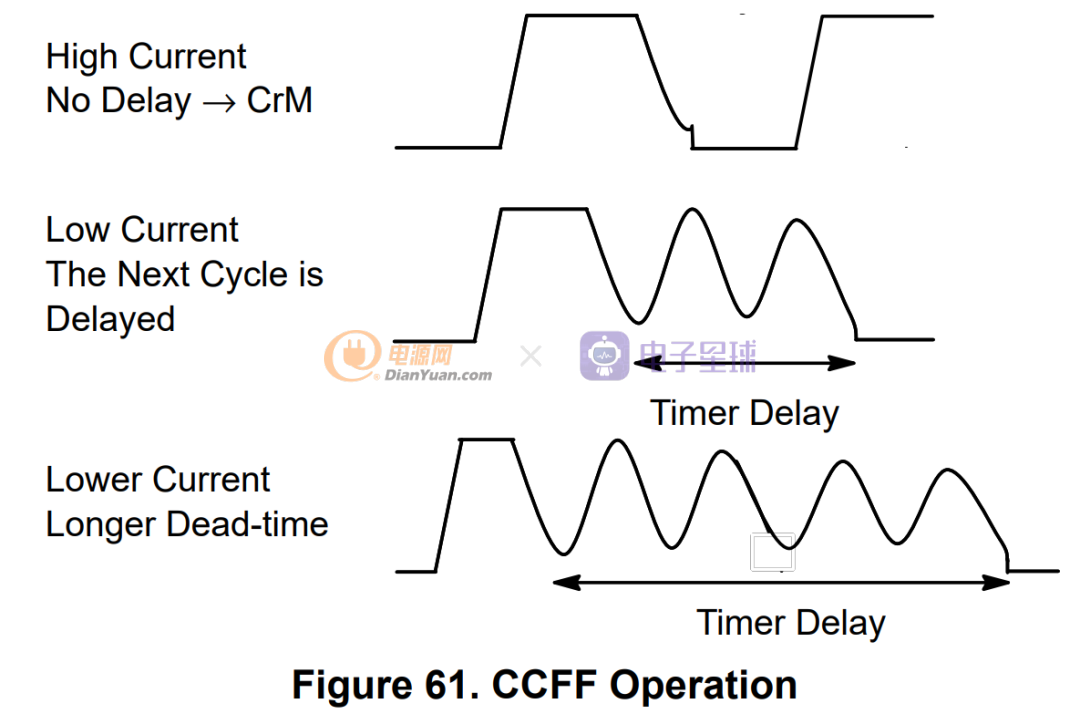
The NCP1612 is designed to drive PFC boost stages based on an innovative Current Controlled Frequency Fold-back (CCFF) method. In this mode, the circuit classically operates in Critical conduction Mode (CrM) when the inductor current exceeds a programmable value. When the current is below this preset level, the NCP1612 linearly decays the frequency down to about 20 kHz when the current is null. CCFF maximizes the efficiency at both nominal and light load. In particular, the stand-by losses are reduced to a minimum.
其控制策略的典型波形为,当负载较重时,会以CRM工作,当负载减弱后会以DCM的TOFF时间长度作为频率调节手段来进行降低频率的控制。可知在DCM的情况下会存在导通损耗增大的问题,这种需要用户自己去平衡DCM/CRM的工作点切换来,来优化DCM的工作范围。但是一般的情况下,低频DCM的工作时的损耗还是要低于高频DCM的磁损和开关损耗。
在之前分析过DCM的电流补偿方法,那么频率反走的CRM控制则主要是关注如何来实现以负载电流来调节TOFF的长度。在DS中ON解释了这种策略的实现方法,就是以VACSEN和VLOOP的乘法后去与CRM比较点比较,来决定进入CRM模式。在DCM则是以固定的ramp与负载电流的叠加来与该点进行比较,来实现DCM的TOFF调节,可见:
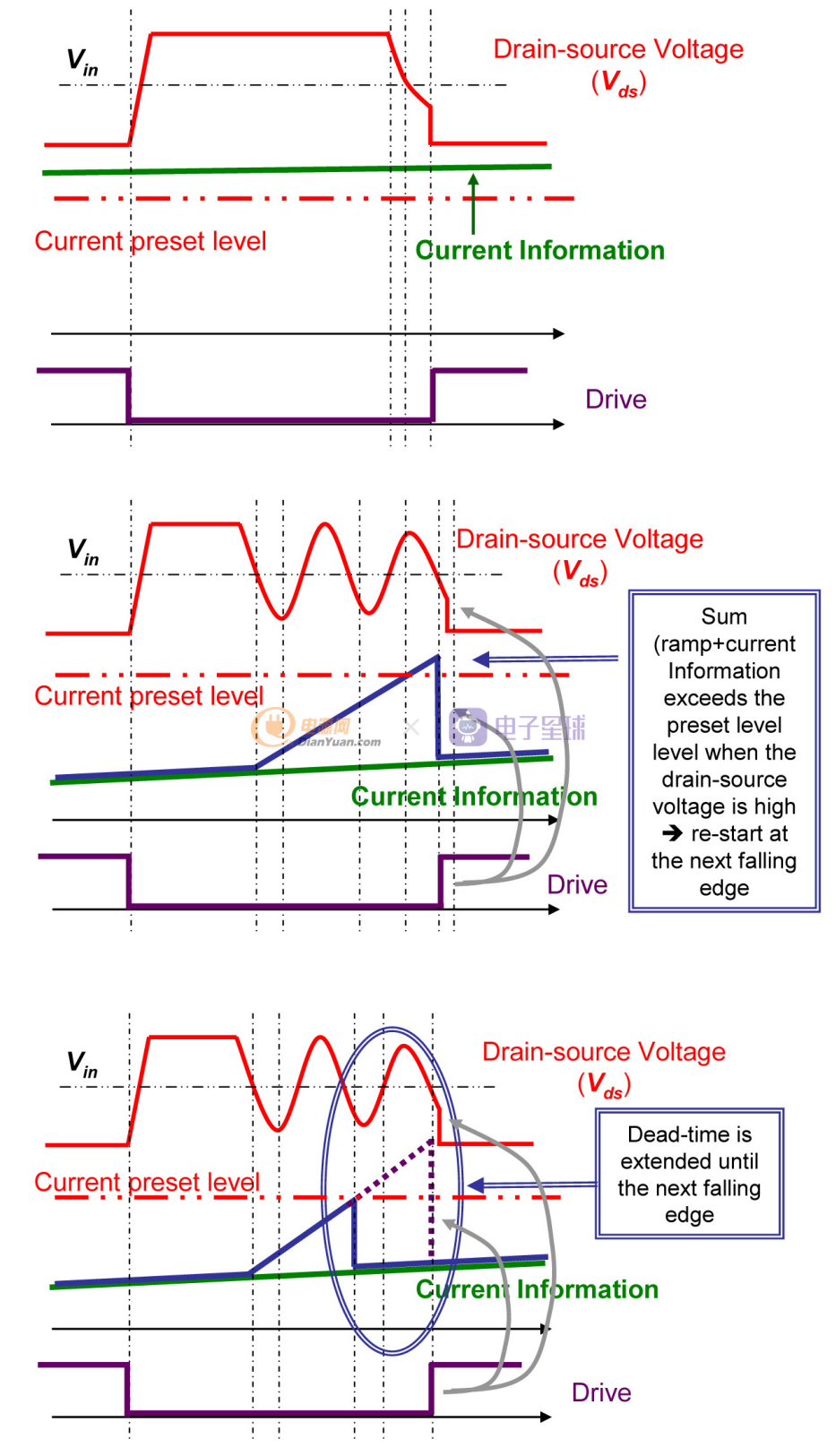
了解频率反走的思想后则可以开始考虑仿真模型中的实现……【继续阅读】
柔性数组在实际项目中的应用
作者:嵌入式大杂烩
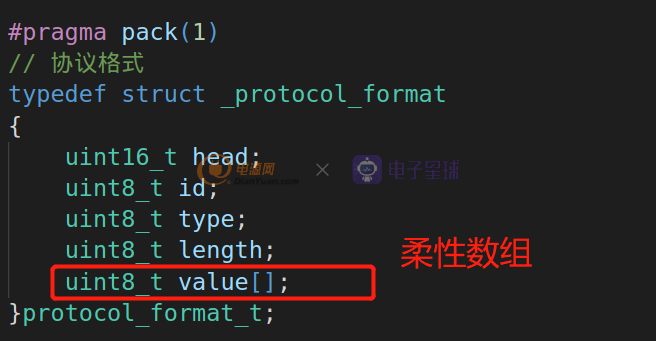
柔性数组在实际中应用还是挺多的,看过上一篇文章一种灵活性很高的协议格式(内附代码例子)的小伙伴不知有没有注意到我们有使用了柔性数组:
本篇文章我们就来一起学习柔性数组。
什么是柔性数组?
C99中,结构体中的最后一个元素允许是未知大小的数组,这就叫作 柔性数组 。
柔性数组的特点:
- 结构体中柔性数组成员前面必须至少有一个其他成员。
- sizeof返回的这种结构大小不包括柔性数组的内存。
- 包含柔性数组成员的结构用malloc()函数进行内存的动态分配。
例子……【继续阅读】
开关电源环路学习笔记6:开关变换器传递函数Gvd(s)推导过程
作者:硬件工程师炼成之路
终于到了最关键的环节,也是最难的环节,如何求出开关级的传递函数?
上期回顾:脉冲调制级传递函数
也就是下图这一级。
哎,不得不说,太难了。。。
不过没办法,先前夸下海口,跟兄弟们说我要把环路搞清楚,现在搞不动也得搞啊。
这一级之所以这么难,主要是有开关元器件,本身是非线性的。
当然了,前面第2小节我们已经阐明了,在满足低频,小信号等条件下,也可以看成是线性的,这里就不再说了。
那么如何求解传递函数呢?
求解方法
求的方法有很多种,常见的有下面这几种:
1、小信号模型的建模思路——基本建模法
2、状态空间平均法
3、开关元件平均模型法
4、开关网络平均模型法
上面这几种方法在《开关变换器的建模与控制+张卫平编著》这本书中都有非常专业详细的讲解。其实我此章也主要是看这本书进行的一个总结。
我个人觉得最好的应该是第4种——开关网络平均模型法,或者说这是我最喜欢的方法吧,也是我深入去看的一种方法。
不过原书中的方法会画出有变压器的等效电路,我不喜欢引入变压器,所以我下面介绍的过程是没有引入变压器的,直接推导出的公式。
Buck的CCM模式求解过程
求解过程主要有这么几步:
1、二端口等效
2、端口参数关系,推导出两个式子
3、代入电路,结合原理推导出传递函数
二端口等效
先来看二端口等效是怎么回事,下面是buck的拓扑。
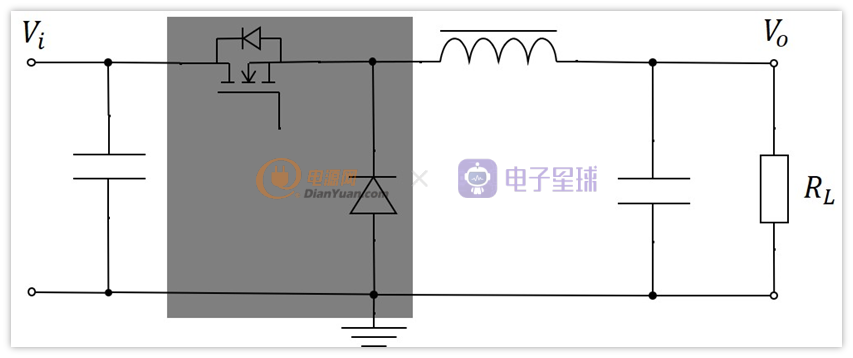
最难搞的就是里面这个MOS管和二极管了,那咋整呢?
干脆就把它看作一个整体,对外有四根线,同时底下两根线接地,所以也就是说有两个端口,是一个二端口网络……【继续阅读】
串口通信与波特率
作者:小小的电子之路
串口是串行接口的简称,串行接口是采用串行通信方式的接口。串行通信是一种将需要传输的数据由低位到高位一位一位地在一条传输线上逐个传输的通信方式。
一、串行通信的数据格式
首先来了解一下串行通信的数据格式,如下图所示,串行通信的一帧数据由起始位、数据位、校验位以及停止位组成。

起始位:低电平,标志着一帧数据的开始;
数据位:数据内容,可选择为5、6、7、8位;
校验位:用于确保传输数据的正确性,可分为奇校验和偶校验。奇校验时数据位和校验位中1的总数应为奇数,同理,偶校验时数据位和校验位中1的总数应为偶数;
停止位:高电平,标志着一帧数据的结束。
二、异步串行通信的波特率
串行通信可以分为两种形式:同步串行通信和异步串行通信。
同步串行通信:通信双方在同一时钟控制下同步传输数据;
异步串行通信:通信双方使用各自的时钟控制数据传输。
对于异步串行通信来说,虽然没有同步时钟,但是通信双方必须约定并遵循同样的设置,这就需要异步串行通信中一个重要的参数来设置,该参数即波特率。
波特率即串口通信的速率,它表示每秒传输二进制数据的位数,单位是bps,即位/秒,常用的波特率有9600、19200、38400、57600和115200等。
以115200的波特率为例,即一秒传输115200个二进制数据位,那么每一位的持续时间
因此,在通信双方约定波特率为115200的情况下,只要发送方发送的每位比特位的持续时间为8.68us,那么正常情况下接收方就能准确无误地解析数据。
三、实验测试
接下来利用实验来简单验证一下上述分析:波特率为115200,一位停止位,八位数据位,无奇偶校验位,发送数据为10110101,每组发送间隔100us……【继续阅读】