为什么选这么老掉牙的IC?
UC384x尽管古老,但其应用仍然是相当的广泛。不完全概况,它至少有以下优点:
1. 足够的稳定成熟
2. 廉价
3. 可调整的开关频率
4. 较强的驱动能力
5. 多选的启动电压
这个帖子主要讲什么?
UC384x的控制原理绝大多数电源界从业人士都很熟悉,帖子主要介绍384x应用于各个常规拓扑的应用实用电路,初步计划包含但不限于以下拓扑:
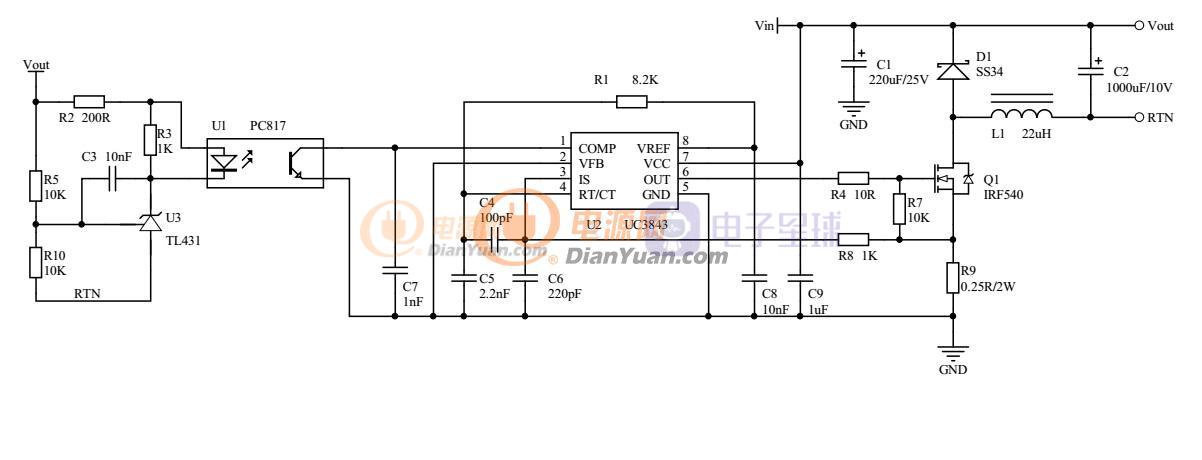
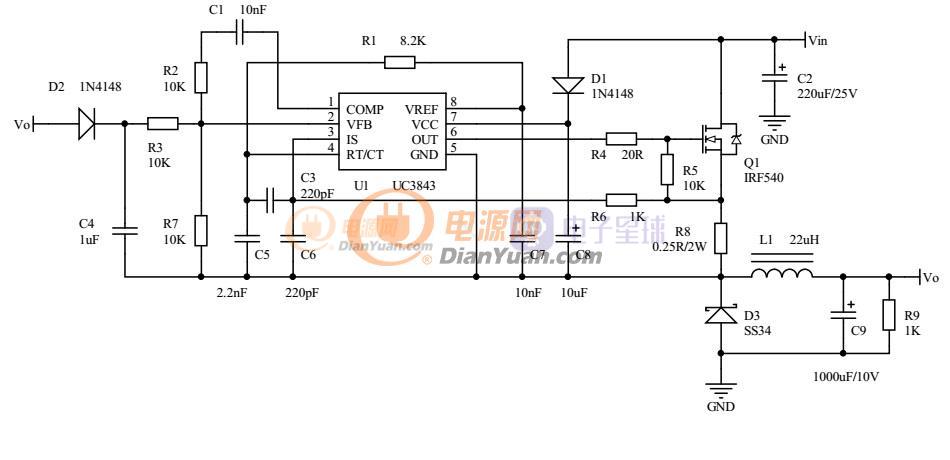
1. buck(低边开关&高边开关)
2. boost
3. buck-boost(反极性)
4. flyback
5. 单管/双管正激
......
由于完成多个实用电路需要时间,楼主可能不一定能够以网友预期的速度更新帖子,如果有网友比较空闲,可以帮忙搭搭电路,测试测试,楼主来画原理图,提供器件。