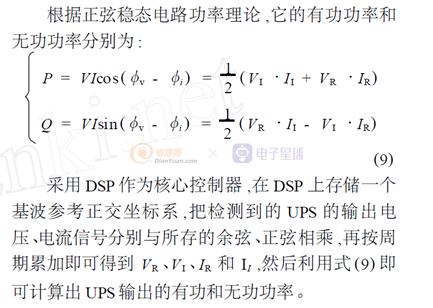
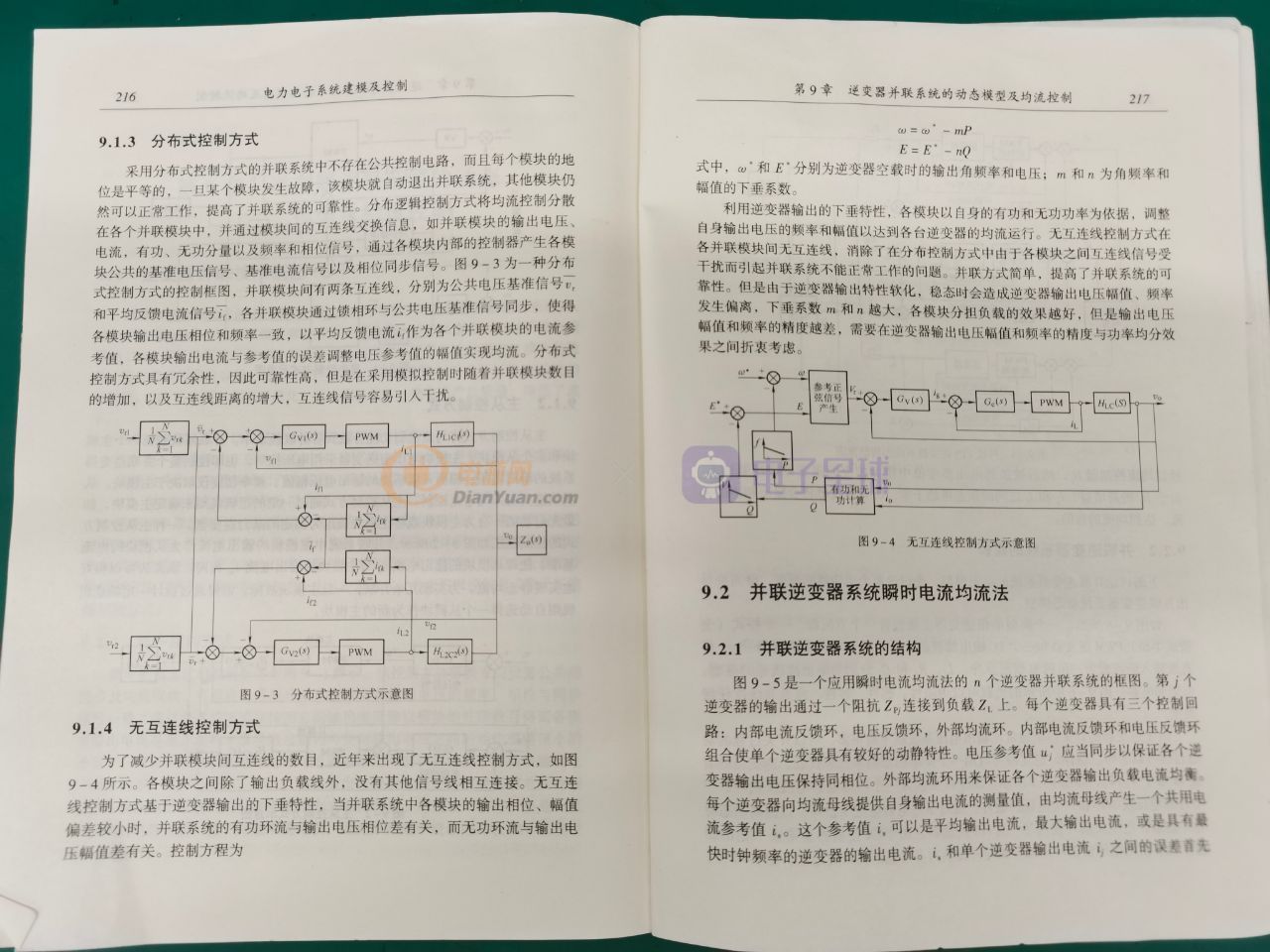
最近看到徐老师《电力电子系统建模及控制》,书中9.1.4章节无互连线并机控制方式,刚好跟要预研的无线并机课题有密切的联系;
通过大量的资料收集,总结如下:
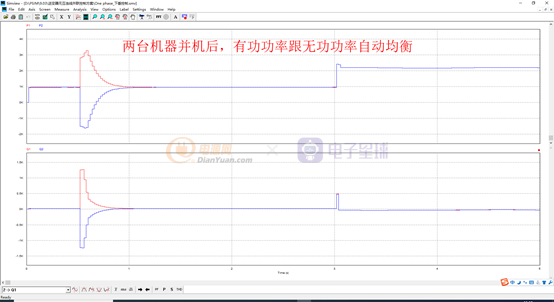
我们可以得出两台离网逆变器在并机的时候:
1、 各输出电压间的相位差主要造成有功功率的差异,有功环流的方向是从相位超前的单元流向相位滞后的单元,即相位超前的发出正有功环流,相位滞后的发出负有功环流。
2、 各输出电压间的幅值差主要造成无功功率的差异,无功环流的方向是从幅值较大的单元流向幅值较小的单元,即幅值大的发出正无功功率,幅值较大的发出正无功环流,幅值较小的发出负无功环流。
考虑在逆变器的控制中加入下垂特性作为逆变器无互连线的均流控制策略。实际上,逆变器的有功功率环流主要取决于输出电压的相位差,而无功功率环流主要取决于输出电压的幅值差,若希望负载在并联的各台逆变电源之间合理分配,那么在下垂特性中就可以像同步发电机一样,分别以有功功率和无功功率作为下垂量,响应的以相位(频率)和电压幅值作为被垂量,只要下垂的参数选取恰当,那么久可以实现在并联逆变电源之间负责的合理分配。
如下为下垂特性方程:
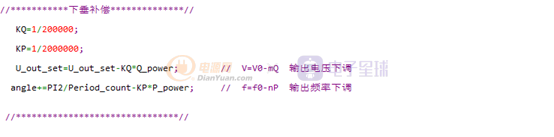
f=f0-mP
V=V0-nQ
式中 f0、V0分别为逆变器空载输出电压的频率和幅值;f、V 分别为逆变器并联运行时实时计算的输出电压频率和幅值;m、n 分别为有功电压频率下垂系数和无功电压幅值下垂系数。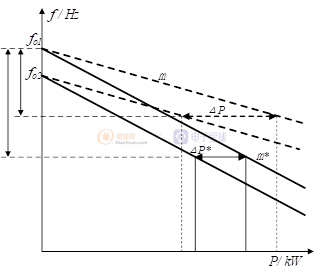
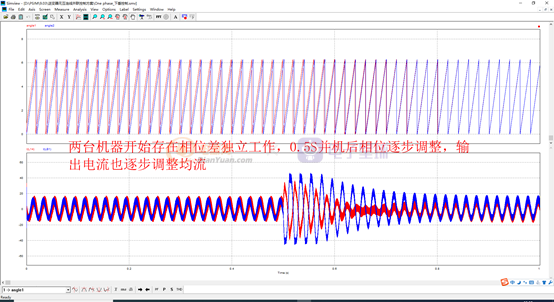
并联逆变器的通信机制:逆变电源并联在一起的逆变器稳态时其频率(或者幅值)的相互一致性,否则系统处于过渡状态或者趋于崩溃(如果频率不一致,则两台逆变器的相位差一直在变化)。
根据有功电压频率下垂方程可知,当输出电压相位差逐渐增大时,相位超前的模块发出有功功率越多,此时其频率下降也越多;相位滞后的模块输出功率小,频率下降也越少。因此发出功率少的模块电压频率高于发出功率多的模块电压频率,经过一段时间后,两台逆变器相位差缩小,最终两台逆变器的相位一致,有功功率偏差得到抑制,无功功率偏差的抑制过程类似。其下垂控制框图如图 4‑2所示:
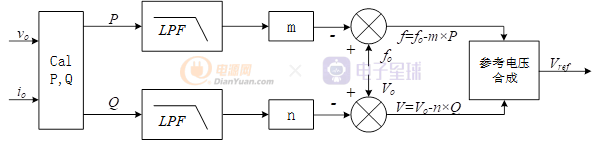
图 4‑2传统下垂控制框图

图 4‑3逆变器电压外环电流内环控制框图