
我现在在做一个逆变器,输入180-300VDC,输出220VAC/1000VA.先用DCDC电路把电池电压升至350V左右,然后再DCAC输出,都采用全桥电路.DCAC工作频率20KHz.
我们先用MSP430产生基准正弦波的半个周期,采用整流电路把交流输出的负半周翻成正半周,然后再和基准正弦波的半周期进行PI调节.调节之后的波形和三角波进行比较得到驱动波形.(先只考虑电压环)PI调节的时间是1ms.
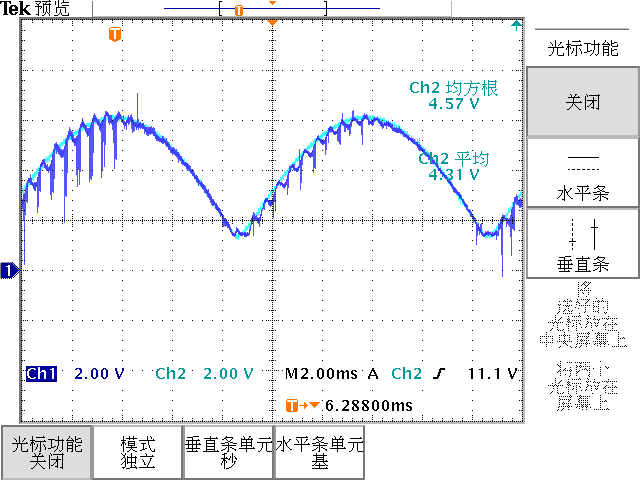
现在的问题是输出波形不能完全跟随参考波形,出现了比较大的锯齿形.见图:
请教各位大虾,怎样才能解决这个问题.谢谢先.
 500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/0/1070507448.bmp');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/0/1070507448.bmp');}" onmousewheel="return imgzoom(this);">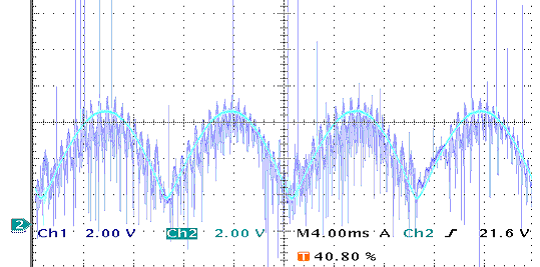 500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/0/1071038713.bmp');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/0/1071038713.bmp');}" onmousewheel="return imgzoom(this);">
