
1091669968.pdf
教材见上面得连接,哪位高手能够分析一下从18页开始得闭环补偿回路得设计思想? 主要是从18-20这3页得计算和分析过程,请高手务必出手相助,不胜感激!
【高手请进】 【有文档】【在线等待】哪位能分析一下这份资料中的 反馈补偿回路.
全部回复(15)
正序查看
倒序查看
现在还没有回复呢,说说你的想法
@天高云清
要先由环路分析仪先测量出当前的增益与相位的关系,分析出交越增益与交越相位的值是不是符合要求,利用外部的补偿网络进行相位和增益调整!
工程师设计了在电源、电动机驱动器或几乎任何功率电子产品内的一个控制回路以后,必须证实回路稳定性已达到规定的技术指标.与在回路上加瞬时负载之后进行纹波、噪声、电压偏移或恢复时间测量不同,你无法用传统的测试仪器,如电压表或示波器,有效地测试回路稳定性.
工程师要使用多种独立的仪器或昂贵的专用设备来进行漫长而又复杂的测试,因此他们常常认为电路仿真能真实地反映制成品的特性.然而,尽管一种表面稳定的设计是以软件仿真为基础的,但工程师们却会发现,印制电路板寄生电抗、生产中的元器件公差以及正常使用时的负载条件变化都会使制成品达不到预期的性能、工作不稳定甚至出故障.
软件仿真虽然是一种有用的工程工具,但它仅仅根据编程员输入程序中的信息,对系统响应进行近似.因此,用软件仿真代替实际测量是不可靠的.如今,现代仪器技术为工程师提供的测试仪器能对这一关键设计特性进行直接测量,而且经济实惠.眼下已有一系列经济实用的技术可用来简化环路稳定性测试(见附文“控制理论是起步之源”).
从测试点开始
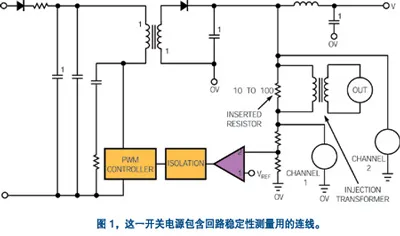
在闭路环境中进行实际测试的第一步是注入一个干扰信号.为达到这一目的,就要在环路中插入一个 10 Ω~ 100Ω 的电阻器,而所选的插入点要使这个小电阻产生的影响可以忽略不计,如与反馈电阻串联(图 1).如果你正在设计一块新印制电路板,最好把这个电阻器永久性地加到电路板的布局里,这样就可以在任何时侯进行这些测试,而不会打乱电路板布线.
 500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140226670.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140226670.jpg');}" onmousewheel="return imgzoom(this);">
为了确定控制环路的增益和相角裕度,要使用一个隔离变压器把一系列离散频率干扰信号加在这一插入的电阻器上,以保证控制回路不会被下拉至地电平(图 2).在每一个被注入的频率点上,要测量插入电阻器两端的相对振幅(单位为dB)和相应相位(单位为度).这两个测量值反映相应测试频率上的闭环增益和回路延迟,并产生一个回路频响图,你依据频响图就可以确定回路稳定性.
为了有效地测量注入信号的相对增益和相位,测量仪器必须抑制除注入频率以外的其它频率成份.实现这种抑制的最好办法,就是在你注入每一个选定的频率时,对在检测电阻器高端(即第1通道)和在检测电阻器低端(即第2通道)测得的数据进行一次 DFT(离散傅立叶变换)(图 3).只要在频率扫描期间直接将经过 DFT 处理的 第 1 和 第2 通道的测量结果绘制成图像,你就不必用 PC 进行处理就可以得到一个完整的频响波德图.例如,尽管图 4 所示系统有好的增益裕度和相角裕度,但却具有很低的增益和交叉频率,从而在负载快速变化时调整率不佳,稳定性降低.与之相反,在满负载时,虽然增益裕度比轻负载时小,但仍然足够大,因而在很宽的频率范围内具有高得多的增益(图 5).这一增益使系统即使在负载快速变化时仍具有出色的调整率和更高的稳定性.
为了确定某一电源有意义的特性,必须在电源预期要工作的负载条件范围内测量其传递函数(图 4 和图 5).然后,一旦确定了在所选负载条件下的传递函数,你就要考虑设计修改对整个传递函数内极点元素和零点元素的影响,以实现最佳的总体性能.
一个极点元素会引入每十倍程-20 dB 的衰减和负相移,而零点元素则会引入每十倍程 20 dB的 衰减和正相移.完整的传递函数包括了控制回路内的极点元素和零点元素.几乎所有系统都会在较高频率下出现衰减,因此,传递函数中的极点元素通常多于零点元素.
在图 4 所示的低端负载传递函数中,频率高至增益交叉频率的衰减是始终如一的,约为每十倍程 20 dB,这表示存在一个主极点.虽然为了说明主题,图 1 没有画出电源的完整原理图,但你要考虑到这一主极点是与控制回路中误差放大器级的电容相关的.减少该级内的这一电容值,就会增加极点频率,进而提高增益,从而改善低频调整率.与这一修改相关的传递函数变化,会影响所有负载条件下的增益和相位,所以你必须在整个负载范围内反复进行测试,以确保增益裕度和相位裕度都保持在目标限度内.
尽管在控制回路设计的早期,PC 仿真是一种有价值的工具,但设计师只有对已完成的设计进行实际测量,才能真正了解真实的控制回路特性.如今,现代测量仪器已能提供一种准确而又经济的手段来应付这一挑战.
--------------------------------------------------------------------------------
附文:控制理论是起步之源
控制回路理论阐述了随时间变化的系统的行为.为了简要复习基础原理,现在考虑这一理论的最常见实例之一,即电源内的控制回路(图 A).
一台稳压电源应为负载提供一个稳定的输出电压,为了实现这一目的,电源在不断变化的负载条件下,必须能调节系统特性来保持所需的输出电压.你可以用一个控制回路来实现这种调节.这种控制回路将电源输出的一部分反馈回去,与一个已知的基准信号进行比较.然后,利用比较产生的误差信号来调整电源系统的增益,从而就能保持所需的输出电压.
只要考虑这个控制回路中的各个元件,你就可以推导出一个表述控制回路对输入端产生影响的基本数学关系式,并利用这一关系式,根据任何输入基准信号计算出输出控制的变量.控制回路包括:一个基准信号 R,即系统的基本输入信号;一个放大器级或增益级 A,即受控系统;一个受控变量 C,即系统的所需输出信号;一个反馈级 B,即一个与系统输出成比例的信号;BC, 即从反馈级送入相加节点的输出信号;相加节点或比较器,在本例中为你从 R 中减去 BC 得到的信号 ;误差信号E,即比较器的输出信号.因此,E=R-BC,而且C=AE;C=A(R-BC)=AR-ABC; C(1+AB)=AR.因此,这一项为系统的传递函数,而且你只要用系统输入乘以传递函数,就可求得任何控制系统的输出.所以,尽管控制理论看来很简单,但在随时间不断变化的条件下对回路稳定性进行分析则是十分复杂的.如果在任意频率下,当回路增益大于 1(0 dB)时,回路相移在 360°以上,则所有闭环反馈系统都可能是不稳定的.当相移接近 360°和增益接近 0 dB时,系统即使没有持续的振荡,也会表现出不稳定的特性.为了维持闭环系统的受控特性,设计师一般都应用增益裕度和相位裕度标准.当回路相位延迟达到 360°时,回路增益应为 -20 dB或低于-20dB.而当回路增益大于 0 dB 时,整个回路的相位延迟应小于 315°,有 45°的裕度.
检查一个控制回路的频率响应或传递函数最方便的方法就是使用波德图,你可以根据波德图确定增益与相位裕度.图 B 示出了由仿真软件生成的一个典型波德图,并示出了裕度与交叉频率点.
工程师要使用多种独立的仪器或昂贵的专用设备来进行漫长而又复杂的测试,因此他们常常认为电路仿真能真实地反映制成品的特性.然而,尽管一种表面稳定的设计是以软件仿真为基础的,但工程师们却会发现,印制电路板寄生电抗、生产中的元器件公差以及正常使用时的负载条件变化都会使制成品达不到预期的性能、工作不稳定甚至出故障.
软件仿真虽然是一种有用的工程工具,但它仅仅根据编程员输入程序中的信息,对系统响应进行近似.因此,用软件仿真代替实际测量是不可靠的.如今,现代仪器技术为工程师提供的测试仪器能对这一关键设计特性进行直接测量,而且经济实惠.眼下已有一系列经济实用的技术可用来简化环路稳定性测试(见附文“控制理论是起步之源”).
从测试点开始
在闭路环境中进行实际测试的第一步是注入一个干扰信号.为达到这一目的,就要在环路中插入一个 10 Ω~ 100Ω 的电阻器,而所选的插入点要使这个小电阻产生的影响可以忽略不计,如与反馈电阻串联(图 1).如果你正在设计一块新印制电路板,最好把这个电阻器永久性地加到电路板的布局里,这样就可以在任何时侯进行这些测试,而不会打乱电路板布线.
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140226670.jpg');}" onmousewheel="return imgzoom(this);">
为了确定控制环路的增益和相角裕度,要使用一个隔离变压器把一系列离散频率干扰信号加在这一插入的电阻器上,以保证控制回路不会被下拉至地电平(图 2).在每一个被注入的频率点上,要测量插入电阻器两端的相对振幅(单位为dB)和相应相位(单位为度).这两个测量值反映相应测试频率上的闭环增益和回路延迟,并产生一个回路频响图,你依据频响图就可以确定回路稳定性.
为了有效地测量注入信号的相对增益和相位,测量仪器必须抑制除注入频率以外的其它频率成份.实现这种抑制的最好办法,就是在你注入每一个选定的频率时,对在检测电阻器高端(即第1通道)和在检测电阻器低端(即第2通道)测得的数据进行一次 DFT(离散傅立叶变换)(图 3).只要在频率扫描期间直接将经过 DFT 处理的 第 1 和 第2 通道的测量结果绘制成图像,你就不必用 PC 进行处理就可以得到一个完整的频响波德图.例如,尽管图 4 所示系统有好的增益裕度和相角裕度,但却具有很低的增益和交叉频率,从而在负载快速变化时调整率不佳,稳定性降低.与之相反,在满负载时,虽然增益裕度比轻负载时小,但仍然足够大,因而在很宽的频率范围内具有高得多的增益(图 5).这一增益使系统即使在负载快速变化时仍具有出色的调整率和更高的稳定性.
为了确定某一电源有意义的特性,必须在电源预期要工作的负载条件范围内测量其传递函数(图 4 和图 5).然后,一旦确定了在所选负载条件下的传递函数,你就要考虑设计修改对整个传递函数内极点元素和零点元素的影响,以实现最佳的总体性能.
一个极点元素会引入每十倍程-20 dB 的衰减和负相移,而零点元素则会引入每十倍程 20 dB的 衰减和正相移.完整的传递函数包括了控制回路内的极点元素和零点元素.几乎所有系统都会在较高频率下出现衰减,因此,传递函数中的极点元素通常多于零点元素.
在图 4 所示的低端负载传递函数中,频率高至增益交叉频率的衰减是始终如一的,约为每十倍程 20 dB,这表示存在一个主极点.虽然为了说明主题,图 1 没有画出电源的完整原理图,但你要考虑到这一主极点是与控制回路中误差放大器级的电容相关的.减少该级内的这一电容值,就会增加极点频率,进而提高增益,从而改善低频调整率.与这一修改相关的传递函数变化,会影响所有负载条件下的增益和相位,所以你必须在整个负载范围内反复进行测试,以确保增益裕度和相位裕度都保持在目标限度内.
尽管在控制回路设计的早期,PC 仿真是一种有价值的工具,但设计师只有对已完成的设计进行实际测量,才能真正了解真实的控制回路特性.如今,现代测量仪器已能提供一种准确而又经济的手段来应付这一挑战.
--------------------------------------------------------------------------------
附文:控制理论是起步之源
控制回路理论阐述了随时间变化的系统的行为.为了简要复习基础原理,现在考虑这一理论的最常见实例之一,即电源内的控制回路(图 A).
一台稳压电源应为负载提供一个稳定的输出电压,为了实现这一目的,电源在不断变化的负载条件下,必须能调节系统特性来保持所需的输出电压.你可以用一个控制回路来实现这种调节.这种控制回路将电源输出的一部分反馈回去,与一个已知的基准信号进行比较.然后,利用比较产生的误差信号来调整电源系统的增益,从而就能保持所需的输出电压.
只要考虑这个控制回路中的各个元件,你就可以推导出一个表述控制回路对输入端产生影响的基本数学关系式,并利用这一关系式,根据任何输入基准信号计算出输出控制的变量.控制回路包括:一个基准信号 R,即系统的基本输入信号;一个放大器级或增益级 A,即受控系统;一个受控变量 C,即系统的所需输出信号;一个反馈级 B,即一个与系统输出成比例的信号;BC, 即从反馈级送入相加节点的输出信号;相加节点或比较器,在本例中为你从 R 中减去 BC 得到的信号 ;误差信号E,即比较器的输出信号.因此,E=R-BC,而且C=AE;C=A(R-BC)=AR-ABC; C(1+AB)=AR.因此,这一项为系统的传递函数,而且你只要用系统输入乘以传递函数,就可求得任何控制系统的输出.所以,尽管控制理论看来很简单,但在随时间不断变化的条件下对回路稳定性进行分析则是十分复杂的.如果在任意频率下,当回路增益大于 1(0 dB)时,回路相移在 360°以上,则所有闭环反馈系统都可能是不稳定的.当相移接近 360°和增益接近 0 dB时,系统即使没有持续的振荡,也会表现出不稳定的特性.为了维持闭环系统的受控特性,设计师一般都应用增益裕度和相位裕度标准.当回路相位延迟达到 360°时,回路增益应为 -20 dB或低于-20dB.而当回路增益大于 0 dB 时,整个回路的相位延迟应小于 315°,有 45°的裕度.
检查一个控制回路的频率响应或传递函数最方便的方法就是使用波德图,你可以根据波德图确定增益与相位裕度.图 B 示出了由仿真软件生成的一个典型波德图,并示出了裕度与交叉频率点.
0
回复
提示
@log1
这个问题几句话讲不清楚的,得写篇长文章才可能.所以你干脆给出个案,帮你算出参数算了.
 500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140411715.gif');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140411715.gif');}" onmousewheel="return imgzoom(this);">
就如图所示的补偿回路,按照什么顺序,怎样一个过程来确定电路中的电阻和电容值.其中,开关频率为500kHz.谢谢!
0
回复
提示
@天高云清
工程师设计了在电源、电动机驱动器或几乎任何功率电子产品内的一个控制回路以后,必须证实回路稳定性已达到规定的技术指标.与在回路上加瞬时负载之后进行纹波、噪声、电压偏移或恢复时间测量不同,你无法用传统的测试仪器,如电压表或示波器,有效地测试回路稳定性. 工程师要使用多种独立的仪器或昂贵的专用设备来进行漫长而又复杂的测试,因此他们常常认为电路仿真能真实地反映制成品的特性.然而,尽管一种表面稳定的设计是以软件仿真为基础的,但工程师们却会发现,印制电路板寄生电抗、生产中的元器件公差以及正常使用时的负载条件变化都会使制成品达不到预期的性能、工作不稳定甚至出故障. 软件仿真虽然是一种有用的工程工具,但它仅仅根据编程员输入程序中的信息,对系统响应进行近似.因此,用软件仿真代替实际测量是不可靠的.如今,现代仪器技术为工程师提供的测试仪器能对这一关键设计特性进行直接测量,而且经济实惠.眼下已有一系列经济实用的技术可用来简化环路稳定性测试(见附文“控制理论是起步之源”). 从测试点开始 在闭路环境中进行实际测试的第一步是注入一个干扰信号.为达到这一目的,就要在环路中插入一个10Ω~100Ω的电阻器,而所选的插入点要使这个小电阻产生的影响可以忽略不计,如与反馈电阻串联(图1).如果你正在设计一块新印制电路板,最好把这个电阻器永久性地加到电路板的布局里,这样就可以在任何时侯进行这些测试,而不会打乱电路板布线.[图片]500){this.resized=true;this.width=500;this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/38/1140226670.jpg');}"onmousewheel="returnimgzoom(this);"> 为了确定控制环路的增益和相角裕度,要使用一个隔离变压器把一系列离散频率干扰信号加在这一插入的电阻器上,以保证控制回路不会被下拉至地电平(图2).在每一个被注入的频率点上,要测量插入电阻器两端的相对振幅(单位为dB)和相应相位(单位为度).这两个测量值反映相应测试频率上的闭环增益和回路延迟,并产生一个回路频响图,你依据频响图就可以确定回路稳定性. 为了有效地测量注入信号的相对增益和相位,测量仪器必须抑制除注入频率以外的其它频率成份.实现这种抑制的最好办法,就是在你注入每一个选定的频率时,对在检测电阻器高端(即第1通道)和在检测电阻器低端(即第2通道)测得的数据进行一次DFT(离散傅立叶变换)(图3).只要在频率扫描期间直接将经过DFT处理的第1和第2通道的测量结果绘制成图像,你就不必用PC进行处理就可以得到一个完整的频响波德图.例如,尽管图4所示系统有好的增益裕度和相角裕度,但却具有很低的增益和交叉频率,从而在负载快速变化时调整率不佳,稳定性降低.与之相反,在满负载时,虽然增益裕度比轻负载时小,但仍然足够大,因而在很宽的频率范围内具有高得多的增益(图5).这一增益使系统即使在负载快速变化时仍具有出色的调整率和更高的稳定性. 为了确定某一电源有意义的特性,必须在电源预期要工作的负载条件范围内测量其传递函数(图4和图5).然后,一旦确定了在所选负载条件下的传递函数,你就要考虑设计修改对整个传递函数内极点元素和零点元素的影响,以实现最佳的总体性能. 一个极点元素会引入每十倍程-20dB的衰减和负相移,而零点元素则会引入每十倍程20dB的衰减和正相移.完整的传递函数包括了控制回路内的极点元素和零点元素.几乎所有系统都会在较高频率下出现衰减,因此,传递函数中的极点元素通常多于零点元素. 在图4所示的低端负载传递函数中,频率高至增益交叉频率的衰减是始终如一的,约为每十倍程20dB,这表示存在一个主极点.虽然为了说明主题,图1没有画出电源的完整原理图,但你要考虑到这一主极点是与控制回路中误差放大器级的电容相关的.减少该级内的这一电容值,就会增加极点频率,进而提高增益,从而改善低频调整率.与这一修改相关的传递函数变化,会影响所有负载条件下的增益和相位,所以你必须在整个负载范围内反复进行测试,以确保增益裕度和相位裕度都保持在目标限度内. 尽管在控制回路设计的早期,PC仿真是一种有价值的工具,但设计师只有对已完成的设计进行实际测量,才能真正了解真实的控制回路特性.如今,现代测量仪器已能提供一种准确而又经济的手段来应付这一挑战.-------------------------------------------------------------------------------- 附文:控制理论是起步之源 控制回路理论阐述了随时间变化的系统的行为.为了简要复习基础原理,现在考虑这一理论的最常见实例之一,即电源内的控制回路(图A). 一台稳压电源应为负载提供一个稳定的输出电压,为了实现这一目的,电源在不断变化的负载条件下,必须能调节系统特性来保持所需的输出电压.你可以用一个控制回路来实现这种调节.这种控制回路将电源输出的一部分反馈回去,与一个已知的基准信号进行比较.然后,利用比较产生的误差信号来调整电源系统的增益,从而就能保持所需的输出电压. 只要考虑这个控制回路中的各个元件,你就可以推导出一个表述控制回路对输入端产生影响的基本数学关系式,并利用这一关系式,根据任何输入基准信号计算出输出控制的变量.控制回路包括:一个基准信号R,即系统的基本输入信号;一个放大器级或增益级A,即受控系统;一个受控变量C,即系统的所需输出信号;一个反馈级B,即一个与系统输出成比例的信号;BC,即从反馈级送入相加节点的输出信号;相加节点或比较器,在本例中为你从R中减去BC得到的信号;误差信号E,即比较器的输出信号.因此,E=R-BC,而且C=AE;C=A(R-BC)=AR-ABC;C(1+AB)=AR.因此,这一项为系统的传递函数,而且你只要用系统输入乘以传递函数,就可求得任何控制系统的输出.所以,尽管控制理论看来很简单,但在随时间不断变化的条件下对回路稳定性进行分析则是十分复杂的.如果在任意频率下,当回路增益大于1(0dB)时,回路相移在360°以上,则所有闭环反馈系统都可能是不稳定的.当相移接近360°和增益接近0dB时,系统即使没有持续的振荡,也会表现出不稳定的特性.为了维持闭环系统的受控特性,设计师一般都应用增益裕度和相位裕度标准.当回路相位延迟达到360°时,回路增益应为-20dB或低于-20dB.而当回路增益大于0dB时,整个回路的相位延迟应小于315°,有45°的裕度. 检查一个控制回路的频率响应或传递函数最方便的方法就是使用波德图,你可以根据波德图确定增益与相位裕度.图B示出了由仿真软件生成的一个典型波德图,并示出了裕度与交叉频率点.
谢谢你得回帖,可是文中的内容不紧凑,而且好多图都没有贴出来,让我看了更晕了,能否直接把整篇文章附贴上,谢谢!
0
回复
提示
@天高云清
工程师设计了在电源、电动机驱动器或几乎任何功率电子产品内的一个控制回路以后,必须证实回路稳定性已达到规定的技术指标.与在回路上加瞬时负载之后进行纹波、噪声、电压偏移或恢复时间测量不同,你无法用传统的测试仪器,如电压表或示波器,有效地测试回路稳定性. 工程师要使用多种独立的仪器或昂贵的专用设备来进行漫长而又复杂的测试,因此他们常常认为电路仿真能真实地反映制成品的特性.然而,尽管一种表面稳定的设计是以软件仿真为基础的,但工程师们却会发现,印制电路板寄生电抗、生产中的元器件公差以及正常使用时的负载条件变化都会使制成品达不到预期的性能、工作不稳定甚至出故障. 软件仿真虽然是一种有用的工程工具,但它仅仅根据编程员输入程序中的信息,对系统响应进行近似.因此,用软件仿真代替实际测量是不可靠的.如今,现代仪器技术为工程师提供的测试仪器能对这一关键设计特性进行直接测量,而且经济实惠.眼下已有一系列经济实用的技术可用来简化环路稳定性测试(见附文“控制理论是起步之源”). 从测试点开始 在闭路环境中进行实际测试的第一步是注入一个干扰信号.为达到这一目的,就要在环路中插入一个10Ω~100Ω的电阻器,而所选的插入点要使这个小电阻产生的影响可以忽略不计,如与反馈电阻串联(图1).如果你正在设计一块新印制电路板,最好把这个电阻器永久性地加到电路板的布局里,这样就可以在任何时侯进行这些测试,而不会打乱电路板布线.[图片]500){this.resized=true;this.width=500;this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/38/1140226670.jpg');}"onmousewheel="returnimgzoom(this);"> 为了确定控制环路的增益和相角裕度,要使用一个隔离变压器把一系列离散频率干扰信号加在这一插入的电阻器上,以保证控制回路不会被下拉至地电平(图2).在每一个被注入的频率点上,要测量插入电阻器两端的相对振幅(单位为dB)和相应相位(单位为度).这两个测量值反映相应测试频率上的闭环增益和回路延迟,并产生一个回路频响图,你依据频响图就可以确定回路稳定性. 为了有效地测量注入信号的相对增益和相位,测量仪器必须抑制除注入频率以外的其它频率成份.实现这种抑制的最好办法,就是在你注入每一个选定的频率时,对在检测电阻器高端(即第1通道)和在检测电阻器低端(即第2通道)测得的数据进行一次DFT(离散傅立叶变换)(图3).只要在频率扫描期间直接将经过DFT处理的第1和第2通道的测量结果绘制成图像,你就不必用PC进行处理就可以得到一个完整的频响波德图.例如,尽管图4所示系统有好的增益裕度和相角裕度,但却具有很低的增益和交叉频率,从而在负载快速变化时调整率不佳,稳定性降低.与之相反,在满负载时,虽然增益裕度比轻负载时小,但仍然足够大,因而在很宽的频率范围内具有高得多的增益(图5).这一增益使系统即使在负载快速变化时仍具有出色的调整率和更高的稳定性. 为了确定某一电源有意义的特性,必须在电源预期要工作的负载条件范围内测量其传递函数(图4和图5).然后,一旦确定了在所选负载条件下的传递函数,你就要考虑设计修改对整个传递函数内极点元素和零点元素的影响,以实现最佳的总体性能. 一个极点元素会引入每十倍程-20dB的衰减和负相移,而零点元素则会引入每十倍程20dB的衰减和正相移.完整的传递函数包括了控制回路内的极点元素和零点元素.几乎所有系统都会在较高频率下出现衰减,因此,传递函数中的极点元素通常多于零点元素. 在图4所示的低端负载传递函数中,频率高至增益交叉频率的衰减是始终如一的,约为每十倍程20dB,这表示存在一个主极点.虽然为了说明主题,图1没有画出电源的完整原理图,但你要考虑到这一主极点是与控制回路中误差放大器级的电容相关的.减少该级内的这一电容值,就会增加极点频率,进而提高增益,从而改善低频调整率.与这一修改相关的传递函数变化,会影响所有负载条件下的增益和相位,所以你必须在整个负载范围内反复进行测试,以确保增益裕度和相位裕度都保持在目标限度内. 尽管在控制回路设计的早期,PC仿真是一种有价值的工具,但设计师只有对已完成的设计进行实际测量,才能真正了解真实的控制回路特性.如今,现代测量仪器已能提供一种准确而又经济的手段来应付这一挑战.-------------------------------------------------------------------------------- 附文:控制理论是起步之源 控制回路理论阐述了随时间变化的系统的行为.为了简要复习基础原理,现在考虑这一理论的最常见实例之一,即电源内的控制回路(图A). 一台稳压电源应为负载提供一个稳定的输出电压,为了实现这一目的,电源在不断变化的负载条件下,必须能调节系统特性来保持所需的输出电压.你可以用一个控制回路来实现这种调节.这种控制回路将电源输出的一部分反馈回去,与一个已知的基准信号进行比较.然后,利用比较产生的误差信号来调整电源系统的增益,从而就能保持所需的输出电压. 只要考虑这个控制回路中的各个元件,你就可以推导出一个表述控制回路对输入端产生影响的基本数学关系式,并利用这一关系式,根据任何输入基准信号计算出输出控制的变量.控制回路包括:一个基准信号R,即系统的基本输入信号;一个放大器级或增益级A,即受控系统;一个受控变量C,即系统的所需输出信号;一个反馈级B,即一个与系统输出成比例的信号;BC,即从反馈级送入相加节点的输出信号;相加节点或比较器,在本例中为你从R中减去BC得到的信号;误差信号E,即比较器的输出信号.因此,E=R-BC,而且C=AE;C=A(R-BC)=AR-ABC;C(1+AB)=AR.因此,这一项为系统的传递函数,而且你只要用系统输入乘以传递函数,就可求得任何控制系统的输出.所以,尽管控制理论看来很简单,但在随时间不断变化的条件下对回路稳定性进行分析则是十分复杂的.如果在任意频率下,当回路增益大于1(0dB)时,回路相移在360°以上,则所有闭环反馈系统都可能是不稳定的.当相移接近360°和增益接近0dB时,系统即使没有持续的振荡,也会表现出不稳定的特性.为了维持闭环系统的受控特性,设计师一般都应用增益裕度和相位裕度标准.当回路相位延迟达到360°时,回路增益应为-20dB或低于-20dB.而当回路增益大于0dB时,整个回路的相位延迟应小于315°,有45°的裕度. 检查一个控制回路的频率响应或传递函数最方便的方法就是使用波德图,你可以根据波德图确定增益与相位裕度.图B示出了由仿真软件生成的一个典型波德图,并示出了裕度与交叉频率点.
哈,我找到这篇文章了,网址:http://210.51.166.125/Article/html/2005-2/AtcShow2005216151553.htm
需要的朋友可以看看.
需要的朋友可以看看.
0
回复
提示
@keenfang
[图片]500){this.resized=true;this.width=500;this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/38/1140411715.gif');}"onmousewheel="returnimgzoom(this);">就如图所示的补偿回路,按照什么顺序,怎样一个过程来确定电路中的电阻和电容值.其中,开关频率为500kHz.谢谢!
设计过程大致是这样的,先由测量设备如N4L厂家,得到回路的增益和相位曲线,根据此曲线设计不同的补偿网络,使整个系统进入稳定状态!
0
回复
提示
@keenfang
[图片]500){this.resized=true;this.width=500;this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/38/1140411715.gif');}"onmousewheel="returnimgzoom(this);">就如图所示的补偿回路,按照什么顺序,怎样一个过程来确定电路中的电阻和电容值.其中,开关频率为500kHz.谢谢!
还需要以下参数,电源主电路类型,整流滤波和输出电路和参数,最差可以接受的响应时间,PWM控制芯片型号.
0
回复
提示
@log1
我设计电源补偿电路从来没用过LOOP测试仪,网络分析仪什么的,基本上算出来就OK,没一个不稳定的.
如果图15中,没用R1和C1,这样的补偿回路是不是相当于只提供了频率为2*pi*R2*C2的零点,系统的相位裕度得以提高,但是增加了系统的高频干扰?还请log1兄能详细的解释一下,你是怎么计算的?据我所知,有的补偿系统只追加一个系统零点,而有些系统追加了两个极点和两个零点,补偿回路很多形式,如何确定应该给系统加以什么样的补偿回路?主要是电源回路的负载是不确定的,原来的开环系统本身的零点和(或)极点的位置就很难确定,所以,不知道该如何下手阿?还请log1兄把整个设计思路好好讲讲,谢谢了!
0
回复
提示
