由于效率要求的不断增长,许多电源制造厂商开始将注意力转向无桥功率因数校正 (PFC) 拓扑结构。一般而言,无桥接 PFC可以通过减少线路电流通路中的半导体组件数目来降低传导损耗。尽管无桥接 PFC 的概念已经提出了许多年,但因其实施的难度和控制的复杂程度,阻碍了其成为一种主流。
一些专为电源而设计的低成本、高性能数字控制器上市以后,越来越多的电源公司开始为 PFC 设计选择使用这些新型数字控制器。相比传统的模拟控制器,数字控制器拥有许多优势,例如:可编程配置、非线性控制、低组件数目,以及最为重要的复杂功能实施能力(模拟方法通常较难实现)。
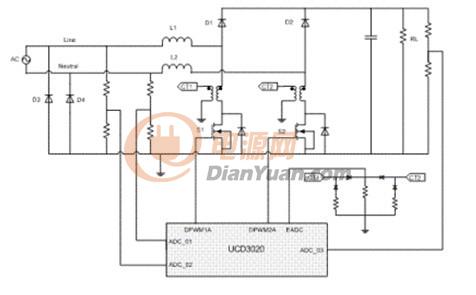
大多数现今的数字电源控制器,例如:TI 的融合数字电源 (Fusion Digital PowerTM) 控制器 UCD30xx 等都有许多集成电源控制外设和一个电源管理内核,例如:数字环路补偿器、快速模数转换器 (ADC)、内置停滞时间的高分辨率数字脉宽调制器 (DPWM)、低功耗微控制器等。它们是如无桥接 PFC 等复杂高性能电源设计的较好选择。