

一、系统框图
系统中的反馈回路可以使用以下众所周知的框图进行建模。
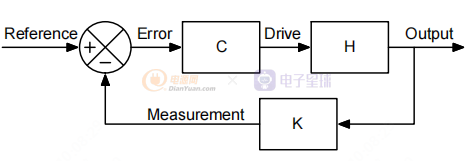 图 1. 反馈回路框图
图 1. 反馈回路框图
H 块代表要控制的工厂或系统。 它提供由反馈回路控制的输出。K 块在将系统输出与参考值进行比较之前测量和缩放系统输出。 缩放的结果称为测量,比较结果称为误差。 C(用于补偿器)放大比较误差以获得输出中的预期值。 它生成控制设备 H 的驱动信号。
二、系统公式
如果我们写一些描述系统关系的方程,我们得到:
如果我们解决它,我们可以写出输出方程:

通常,在补偿器 C 中,我们构建一个积分器(或在原点放置一个极点)以减少静态输出误差。 在这种情况下,准静态增益(或直流增益)是无限的,所以我们得到:

将(3)代入(2),我们可以得到静态或DC的输出值:

这个方程是众所周知的,并且用于通过电阻分压器来缩放输出值,例如在 TL431 应用中。 使用(1)中的方程组,我们可以推导出另外两个公式。 首先,我们可以提取作为误差函数的测量。 这就像通过排除比较器来打开系统。

系统开环方程:

其次,我们可以将 Measure 提取为 Reference 的函数。 使用(2),我们得到:

这个公式描述了我们可以称之为 S 的系统闭环方程。

然后我们可以不同地组合这些术语,并获得闭环表达式和开环表达式,反之亦然。

三、稳定性标准
在系统方程(8)中,我们可以清楚地看到,如果分母为零,则 S 是不确定的。 这是系统输出值存在的条件之一。 实际上,如果不满足此条件,系统将变得不稳定(并振荡)或饱和至电源轨之一。
拥有稳定系统的最低要求是:

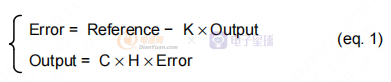
Nyquist是第一个使用图形方法研究反馈回路稳定性的人,以确定系统是否稳定。 开环传递函数 T(jω) 作为脉动频率 2πf 的函数绘制在虚轴上。 如果该曲线在频率增加时环绕 (-1 + j0) 点,则系统(通过闭合反馈回路制成) 不稳定。 如果不是,显然系统是稳定的。
该奈奎斯特准则为我们提供了以下稳定和不稳定系统的图表。
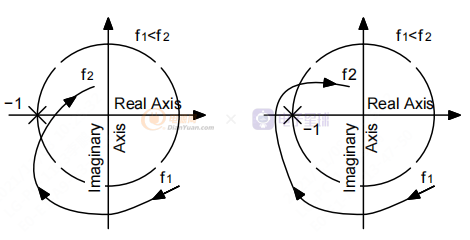 图 2. 奈奎斯特准则
图 2. 奈奎斯特准则
为了具有更好的鲁棒性和确保稳定性,定义了两个主要标准。 它们基于开环传递函数图分析。 对于绘图,我们可以使用 Nyquist 、Bode 或 Black-Nichols 图。
相位裕度定义为开环传递函数相位与交叉频率下的 -180° 之间的差值(即,当开环传递函数增益为 1 或 0 dB 时)。
增益裕度定义为开环传递函数增益与 0 dB 增益之间的差值,当开环传递函数相位等于 -180 时。
这给出了以下图表来评估这些标准。
 图 3. 奈奎斯特图中的边距
图 3. 奈奎斯特图中的边距
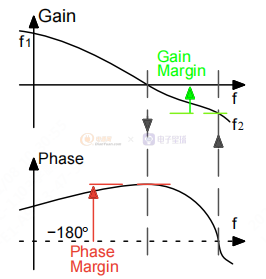
图 4. 波特图中的边距
Black-Nichols 图是测量相位和增益裕度的最简单方法。 一开始,没有与频率的链接会干扰用户,但这是一个简单的测量方法,因为稳定性很重要。
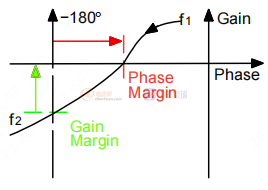 图 5. Black-Nichols 图中的边距
图 5. Black-Nichols 图中的边距
Black-Nichols 图的另一个优点是,如果增益发生变化,它只是曲线的向上或向下移动。 当光耦合器的电流传输比 (CTR) 随工作条件变化时,会发生这种类型的偏移。因此,很容易预测下图所示的剩余余量。
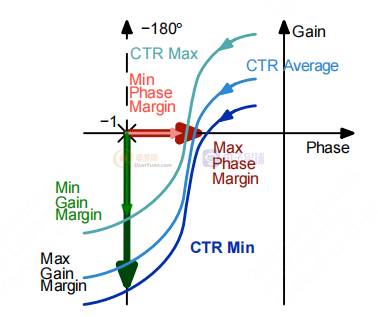 图 6. 增益和相位裕度变化与传递函数增益变化
图 6. 增益和相位裕度变化与传递函数增益变化