

大家好,今天我们来学习一下斜率补偿的问题,斜率补偿也被叫做斜坡补偿,那为什么会出现斜率补偿以及怎么解决这个问题呢?今天我们来一探究竟。
在开关电源DCDC变换器中,在采用电压模式控制中,由输出电压反馈与电源芯片内部锯齿波载波信号比较产生PWM波进而控制开关管的占空比来实现输出电压的控制,这种控制方式并不需要考虑斜坡补偿,而在电流模式控制中,控制环路中存在电压控制外环和电流控制内环两个反馈环。其中的电流环为流过开关管的斜坡电流信号,它经过采样电阻转换为斜坡电压信号,斜坡电压信号和反馈比较电压一起决定PWM的占空比。
1.为什么需要斜率补偿
下面以Buck峰值电流控制为例,分析斜坡补偿的原理:图1中正常无扰动电感电流波形,电流的上升斜率为m1,下降斜率为-m2,m1和m2的值和电路拓扑有关,以Buck变换器为例,电感的上升斜率m1=(Vin-Vout)/L,下降斜率-m2=-Vout/L。
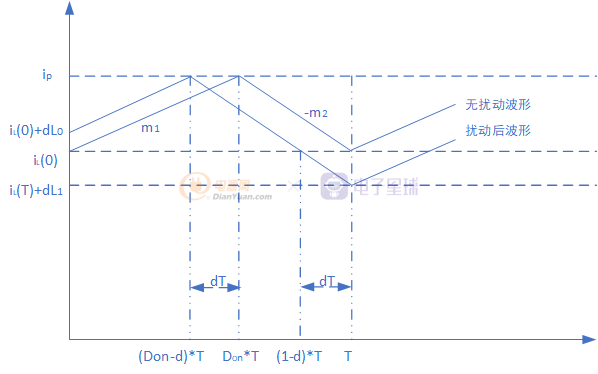
图 1 电感电流波形
无扰动情况下,在电路工作的0~Don*T时间内,开关管导通,二极管截止,电感电流线性增加,在Don*T时刻,电流达到峰值,电感电流为
在Don*T~T时间内,开关管关断,电感电流通过二极管续流,电感电流线性下降,在T时刻,电感电流为
当电路工作在稳定状态下,
因此,在理想状态下
图1中电感电流不存在扰动情况下的电流变化的波形:在没有扰动时,电感电流在开关周期初始时电流为iL(0);在Don*T时,电感电流达到最大值ip;在T时刻,电感电流为iL(T)。
图1中电感电流在存在扰动下的电流波形:在t=0时刻存在一扰动dL,其值在初始时变为iL(0)=iL0+dL0,于是Buck电路的占空比由扰动情况下的Don变为Don-d,在t=(Don-d)*T,电感电流达到峰值;当t=T时,电感电流下降到iL(T)-dL1,电感电流在一个周期中的初始和结束时刻电流值不等,
由前面的分析可得
同理可得
结合前面的公式可得
上式表明每个周期结束时的电感电流扰动量等于周期开始时刻的电感电流扰动量与-m2/m1的乘积,可以得到
因此,只有当时,电感电流变化量才能趋向于0,由于
可得
综上,在存在扰动情况下必须满足Don<0.5,如果想要解决这个限制条件,就需要斜率补偿。
2.斜率补偿
斜率补偿一般是在iL上叠加一个电流ik,此时ip=iL+ik,如下图所示
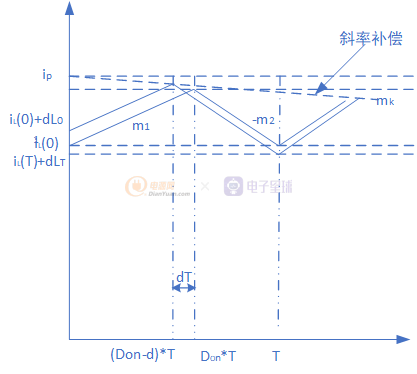
图 2 加入斜率补偿后电感电流波形
由上图可得
由此可得,所以当
时,扰动就可以被逐渐减小并消除。n个开关周期后
则或
时方能满足收敛。
假设,则可得
所以

图 3 占空比和斜率补偿关系
从图3可以看出,在占空比0~1的范围内,只有当补偿量在0.5~1范围内才能满足扰动量收敛。