

前言:最近一直在学习多模式的PFC控制策略,本文是NCP1605的的学习笔记。下面是它的简单介绍,这个控制器提出频率钳位DCM控制方法,同时使用DCM补偿可以优化在轻负载的thd,确实是值得学习和研究。
在const on time control的CRM PFC上,在轻负载和AC过零点附近会出现较高的开关频率,这能恶化轻负载效率是需要改善的方向。其示意图可见:

如果钳位住CRM的最大开关频率,则可以自动让系统工作在DCM模式,但是存在的问题是DCM的电流波形的平均值计算方法和CRM的不一致,为了优化DCM情况的ithd则需要考虑去补偿DCM的电流。可见:

S1 电流补偿:可知,CRM的电流平均值为ipk/2,而DCM则是Ipk*(ton+toff)/(ton+toff+td)。所以如果要让DCM的电流平均值与CRM一致就需要把td时间考虑进去,因此需要抓到Td时间在tsw内的占比,然后用除法换算进去即可实现,这也是ncp1605的控制思想。
S2 FMAX频率钳位:需设置系统最大工作频率,使用一个固定的定时器来进行判断,当电感电流ZCD出现在FMAX振荡器一个周期以内,则需要等定时器结束后才能产生pwm set开启新的周期
S3 DCM/CRM过渡:如果电感电流ZCD出现后,并且开关周期长于FMAX振荡器的周期,则使用ZCD作为pwm set开启新的PWM周期。
S4 使用CONST ON TIME CTRL ,无需采样AC电压。
系统:
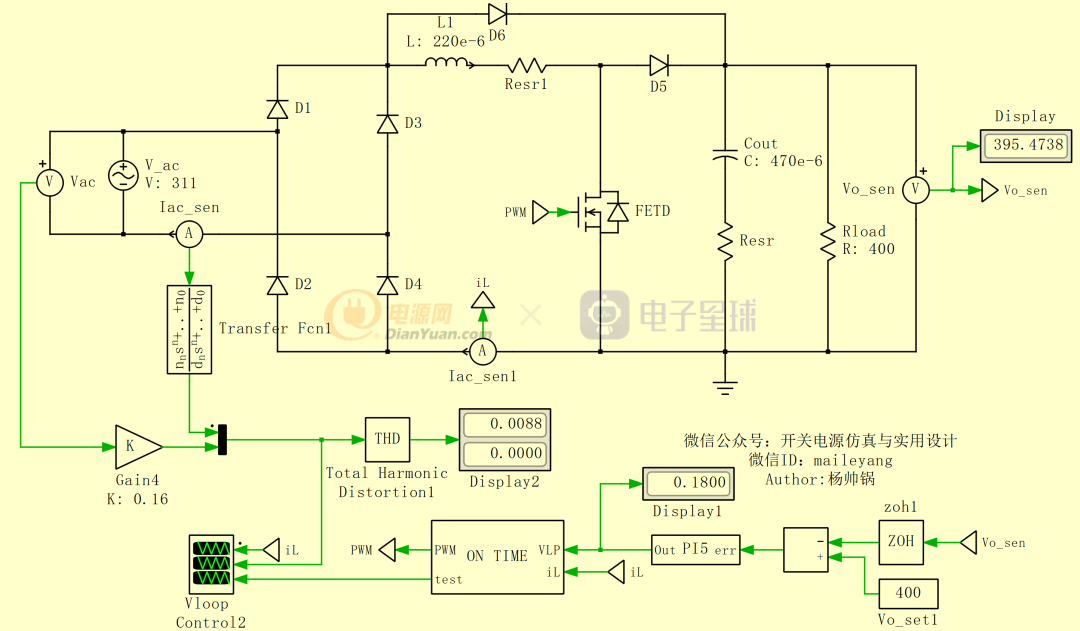
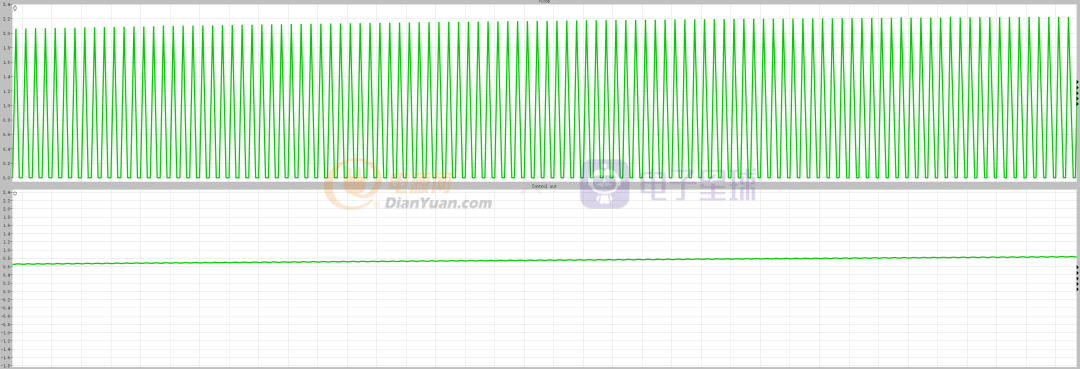
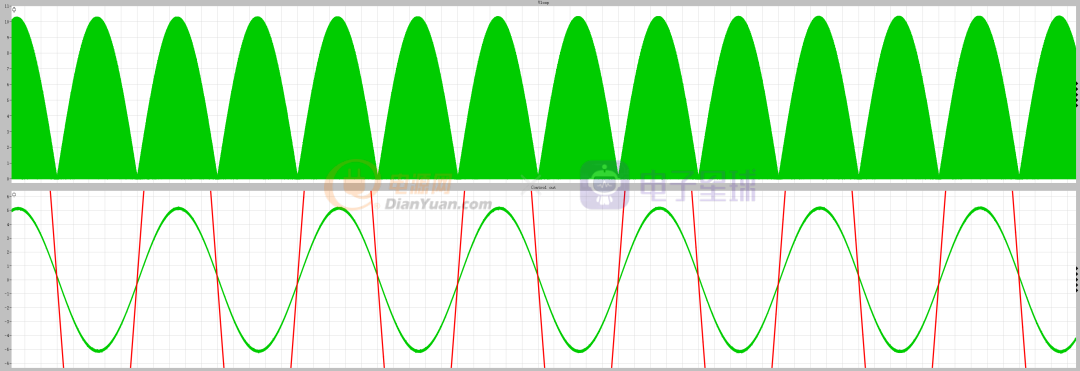
AC 220V PO 400W

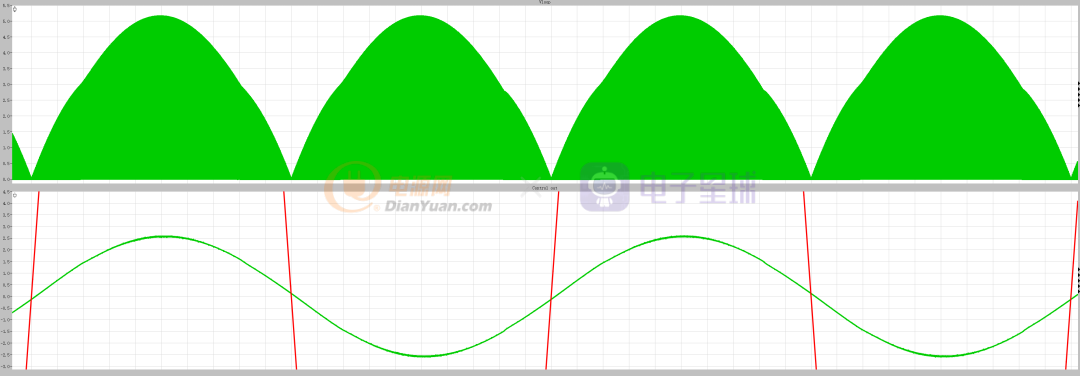
DCM/CRM工况
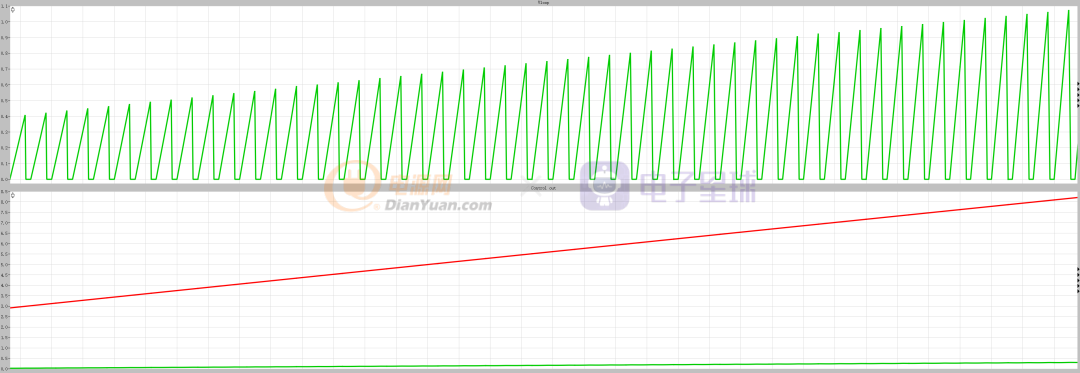
AC 220V PO 160W

全部在DCM运行
AC 110V PO 400W
全部CRM

小结:根据NCP1605的规格书,理解了CRM/DCM频率钳位PFC的控制的实现方法,理解了DCM/CRM电流的补偿方法,并建立了仿真模型,进行了测试,取得了很好的控制效果,这对我后面的工作大有裨益。感谢观看,感谢支持。本人能力有限,如有错误恳请帮忙指正,谢谢。