

对于 RS485 ,大家应该都很熟悉了,在 modbus 协议中最常用。
但最近鱼鹰在调试 RS485 时遇到了不少问题。
首先,我们知道 RS485 属于半双工,同一时刻,只能收或者发。
像这种情况,我们需要一种机制控制它的收发,既可以是软件,也可以是硬件。
硬件
一般RS485芯片,都会提供一个控制引脚完成收发工作。
这个引脚可能由用户控制,也可能由芯片自动控制(一般比较贵),还有第三种可能是,设计一种自动收发的电路(应该没有超脱三界之外的吧)。
自动收发电路很多,有用三极管控制的,也有用缓冲器的(好像是吧),电路大致如下:
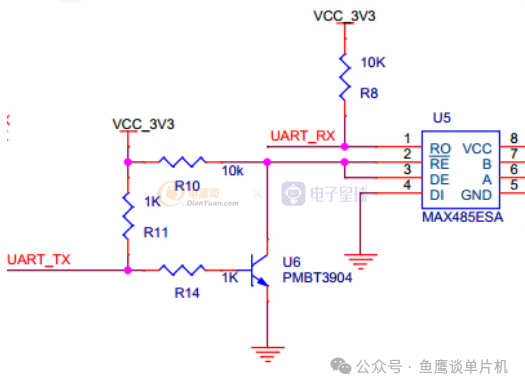
图来源于网络
因为 UART_TX 空闲电平为高,因此三极管导通,RE 接地,默认为发。
但是我还看过一种用 S8550 实现的电路,基极接地,三极管默认(空闲)不导通。
我不是电子工程师,无法判断两者电路的好坏,但我感觉默认不导通更好,功耗更低,另外即使引脚未配置(刚上电,肯定没那么快配置),那么也不会影响到总线上的其它节点通信,这个涉及到各个 485 节点上电时序问题。
这种电路好像因为三极管开关频率限制,无法做到很高频率(一般115200,市面上购买的模块基本都是类似这种电路)。
总之一句话,电路需要默认处于接收状态,保证不会干扰总线通信,否则只要其中一个节点默认状态不是接收,那么无法通信(因此,如果无法通信,不如查一查是否有节点状态不对,而不是首先怀疑芯片烧掉了)。
另外其中一个节点发送,其它节点必须保持接收,不要发送数据,否则数据肯定不是你想要的。
这种有频率限制,那是否有那种频率没限制,同时不需要买贵的 RS485 自动收发芯片的方案呢?
还真有,这要看你的 MCU 芯片本身是否支持了。
比如 IMX93,就可以实现(参考 IMX93RM.pdf,62.3.4)。
官网论坛也有对此实现方法:
https://community.nxp.com/t5/i-MX-Processors/RS485-iMX93/m-p/1896764#M225674特别注意这里使用 RTS 引脚,而不是 CTS(其它芯片可能是用RTS)。
设备树配置如下(一般在arch/arm64/boot/dts/freescale/xxx 下,引脚描述文件
pinctrl_uart7: uart7grp {fsl,pins =
;};&lpuart7 { uart-has-rtscts; rts-gpios = <&gpio2 7 GPIO_ACTIVE_HIGH>; linux,rs485-enabled-at-boot-time;
// rs485 abilitata fin da subito al boot rs485-rts-active-high; rs485-rts-delay = <1 1>;};最终的效果是:
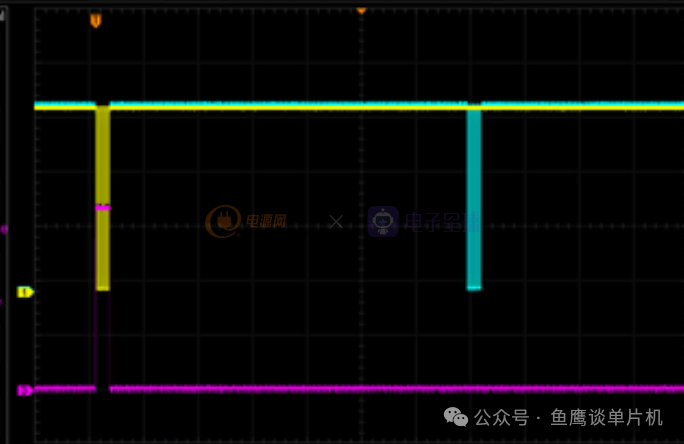
来源官网论坛
当你发送数据时,DE 引脚会被芯片自动控制电平状态(默认为低电平),从而实现不需要由用户控制的自动收发功能,并且没有频率限制(但受串口自身频率限制)。
软件
说完硬件,再说软件。
其实很多软件或驱动是会带上 DE 引脚的控制(硬件挖坑,软件负责填坑),比如如果你的开发板不支持上面的功能,那大概率这颗芯片的Linux串口驱动会带上该功能。
还有开源软件 libmodbus 也考虑了这个引脚的控制。只是从效率和省心的角度,当然是自动收发爽了。
为了使用 485 的功能,不管 MCU 是否支持,都需要使能 485 模式,只是可能参数上需要进行调整。下面是硬件支持的配置:
#include #include #include #include #include int fd = open("/dev/ttyLP7", O_RDWR); if (fd < 0) { } struct serial_rs485 rs485conf = {0}; /* enable RS485 mode: */ rs485conf.flags |= SER_RS485_ENABLED; /* set logical level for RTS pin equal to 1 when sending: */ rs485conf.flags |= SER_RS485_RTS_ON_SEND; /* set logical level for RTS pin equal to 0 after sending: */ rs485conf.flags &= ~(SER_RS485_RTS_AFTER_SEND); /* Set delays for RTS if needed */ rs485conf.delay_rts_before_send = 0; rs485conf.delay_rts_after_send = 0; /* Enable full-duplex mode if supported */ // rs485conf.flags |= SER_RS485_RX_DURING_TX; if (ioctl(fd, TIOCSRS485, &rs485conf) < 0) { /* Error handling */ } Python代码
port = serial.Serial(port="/dev/ttyLP6", baudrate=115200, timeout=2, write_timeout=2)port.rs485_mode = serial.rs485.RS485Settings()shell 脚本,注意关闭回显:
stty -F /dev/ttyLP6 115200 cs8 -cstopb -parenb -echoecho "dddd" > /dev/ttyLP6系统
从系统角度,我们也要知道一些基础知识。
比如,串口设备名称一般是 /dev/tty*。
通过命令 udevadm info 可以反查看该设备的硬件(设备树)信息:
udevadm info /dev/tty* |grep DEVPATH=/devices/platform输出:
DEVPATH=/devices/platform/soc/107d001000.serial/tty/ttyAMA10这样我们可以知道,ttyAMA10 设备是芯片上的 107d001000 串口。
另外,我们可以通过系统启动信息查看挂载的串口:
dmesg | grep -i fsl-lpuart刚插入的设备不知道挂载在哪个/dev/tty* 目录下,同样可以通过上面的类似命令找到:
dmesg | grep -i tty设备树节点查看路径:
/sys/firmware/devicetree/base/soc@xx/bus@xxx/serial@xxxx脚本直接控制 IO:
gpioset gpiochip0 14=1 gpioset gpiochip0 14=0这里面的 gpiochip0 和 14 也不是随便选的,并且 chip 的选择和我们常规的想法不同,具体可看 SDK 文档说明。
设备树编译:
dtc -I dts -O dtb -o /path/to/your-device-tree.dtbo /path/to/your-device-tree.dts总之,要在 Linux 环境中调试好串口驱动,远比 MCU 环境更复杂,需要掌握知识也更多。