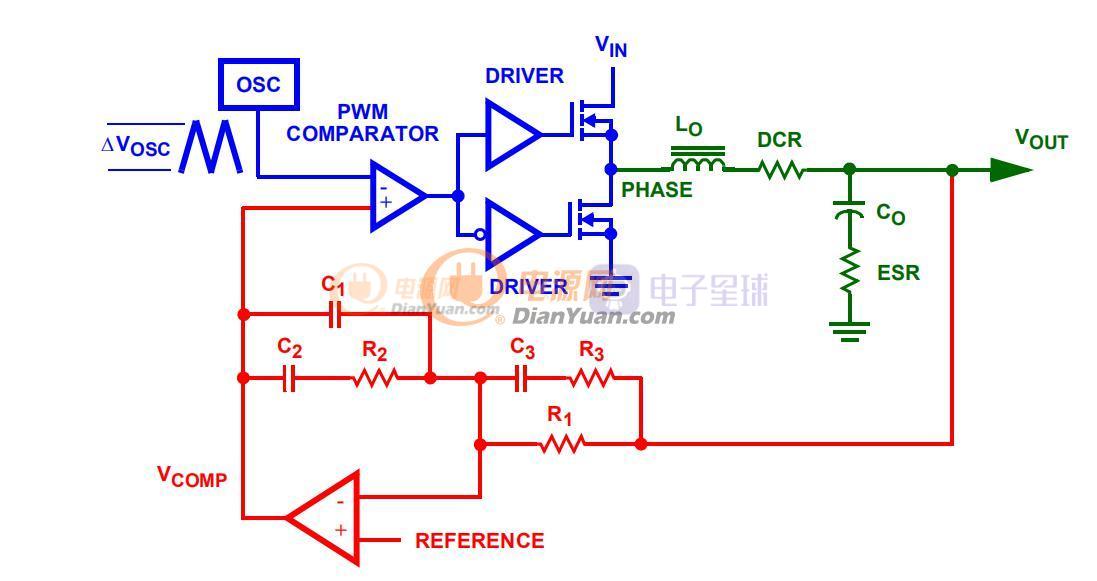
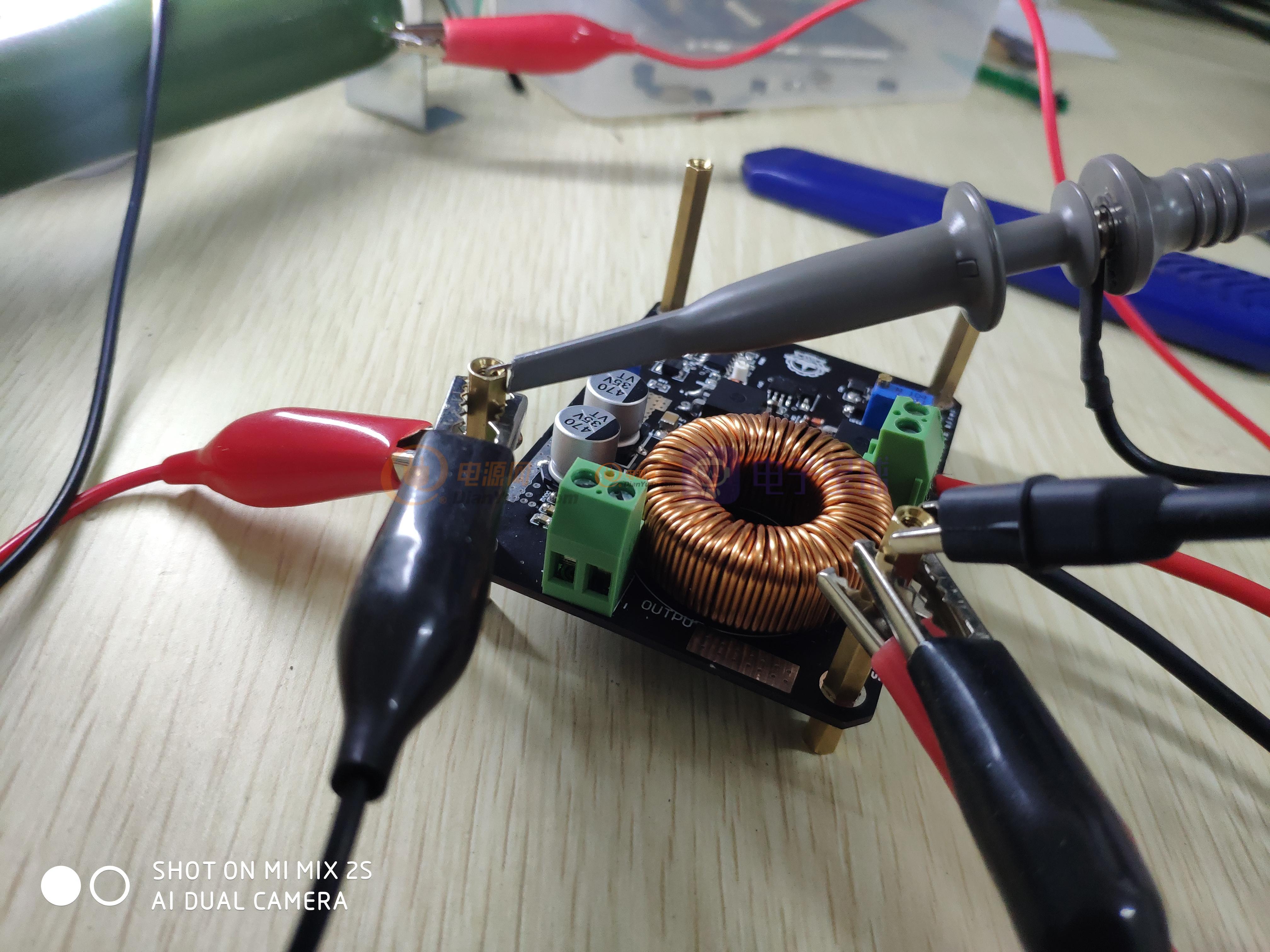
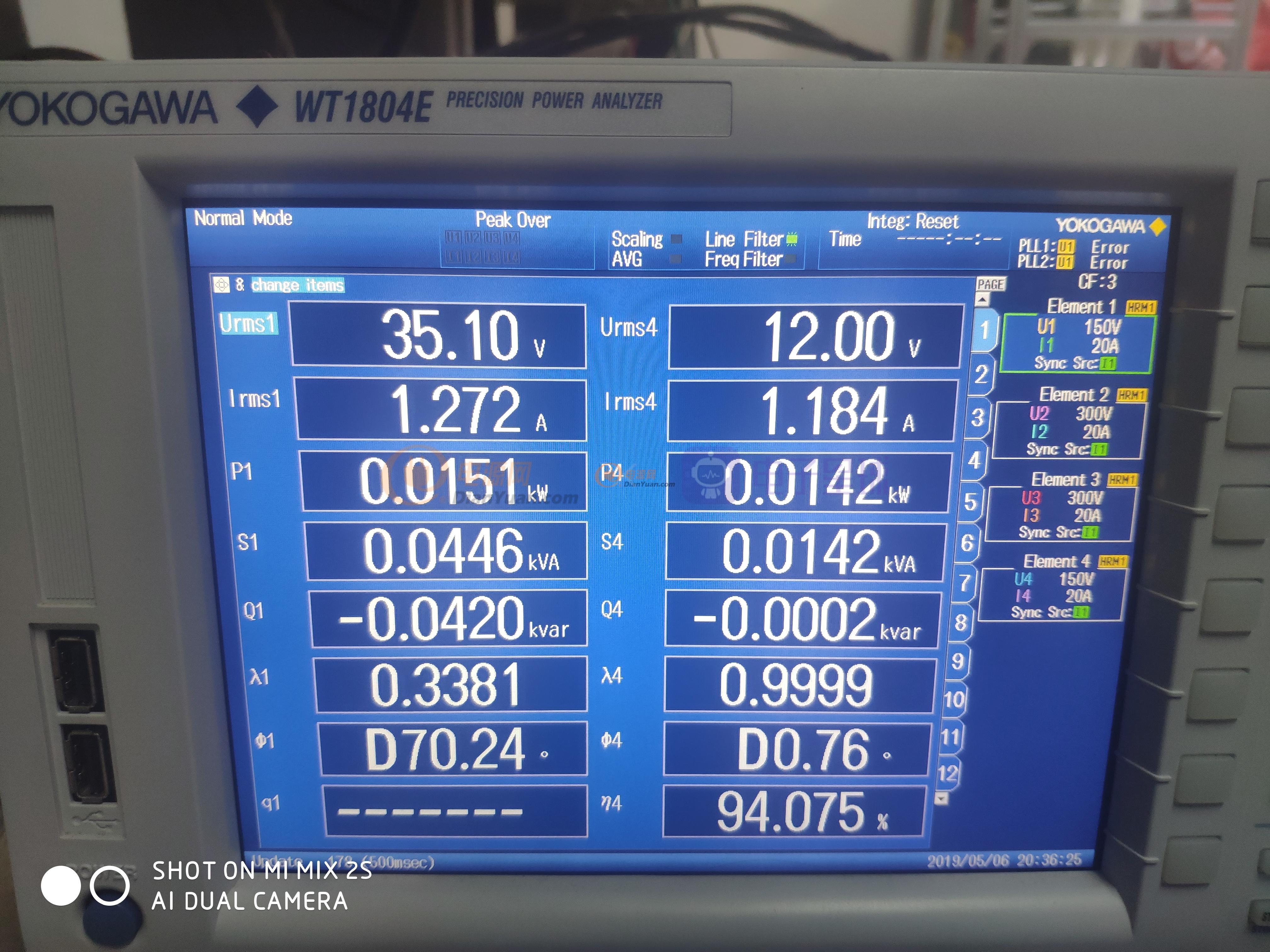
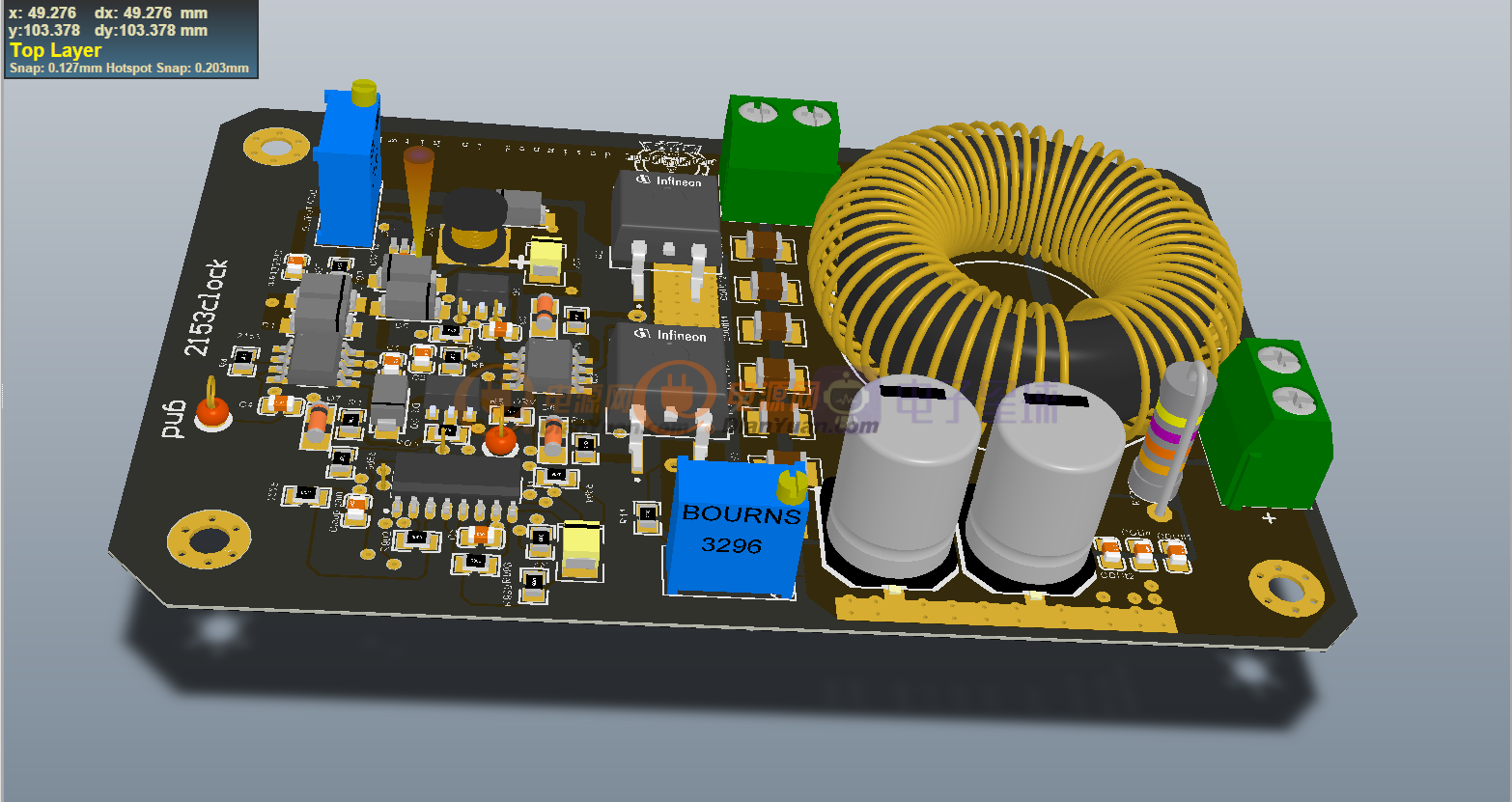
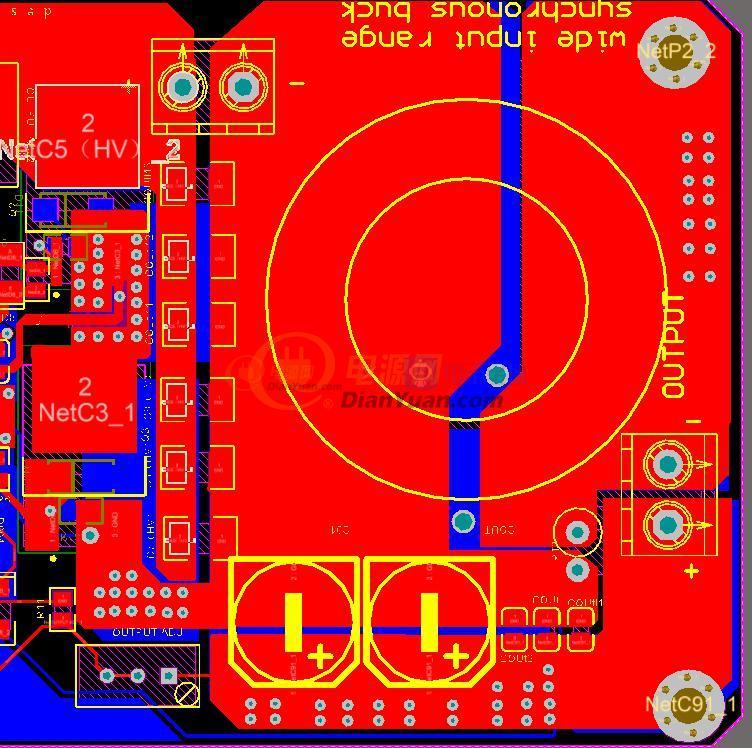
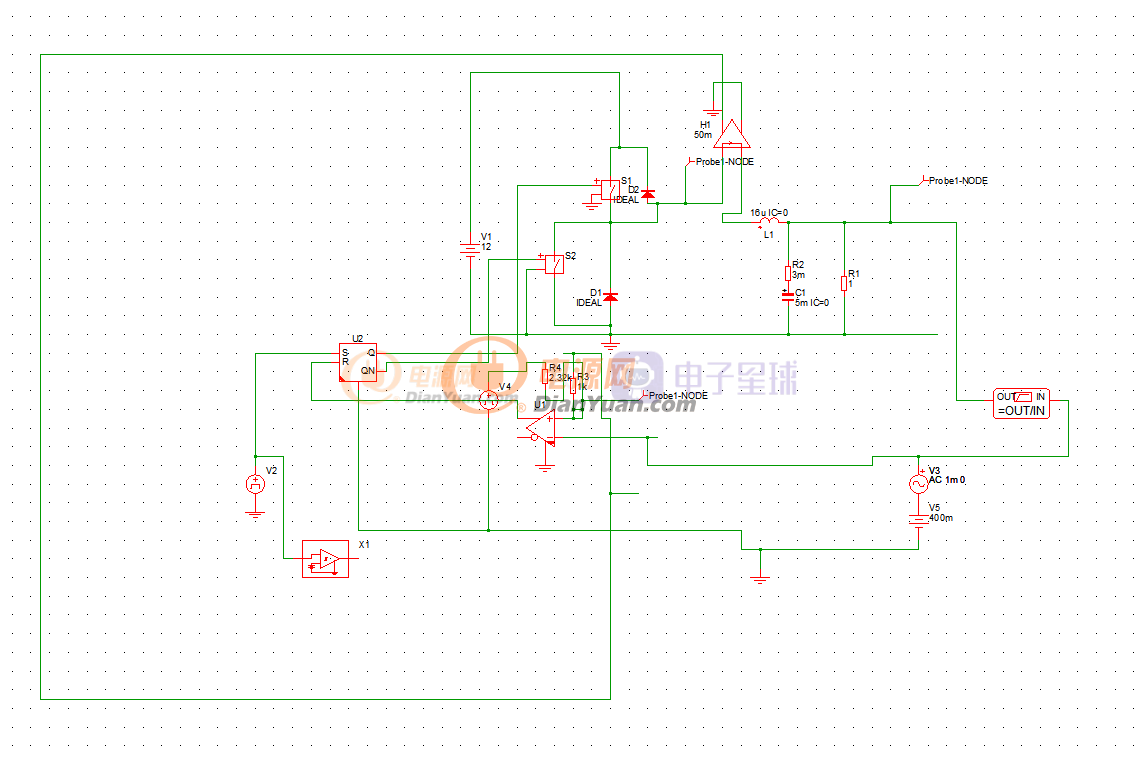
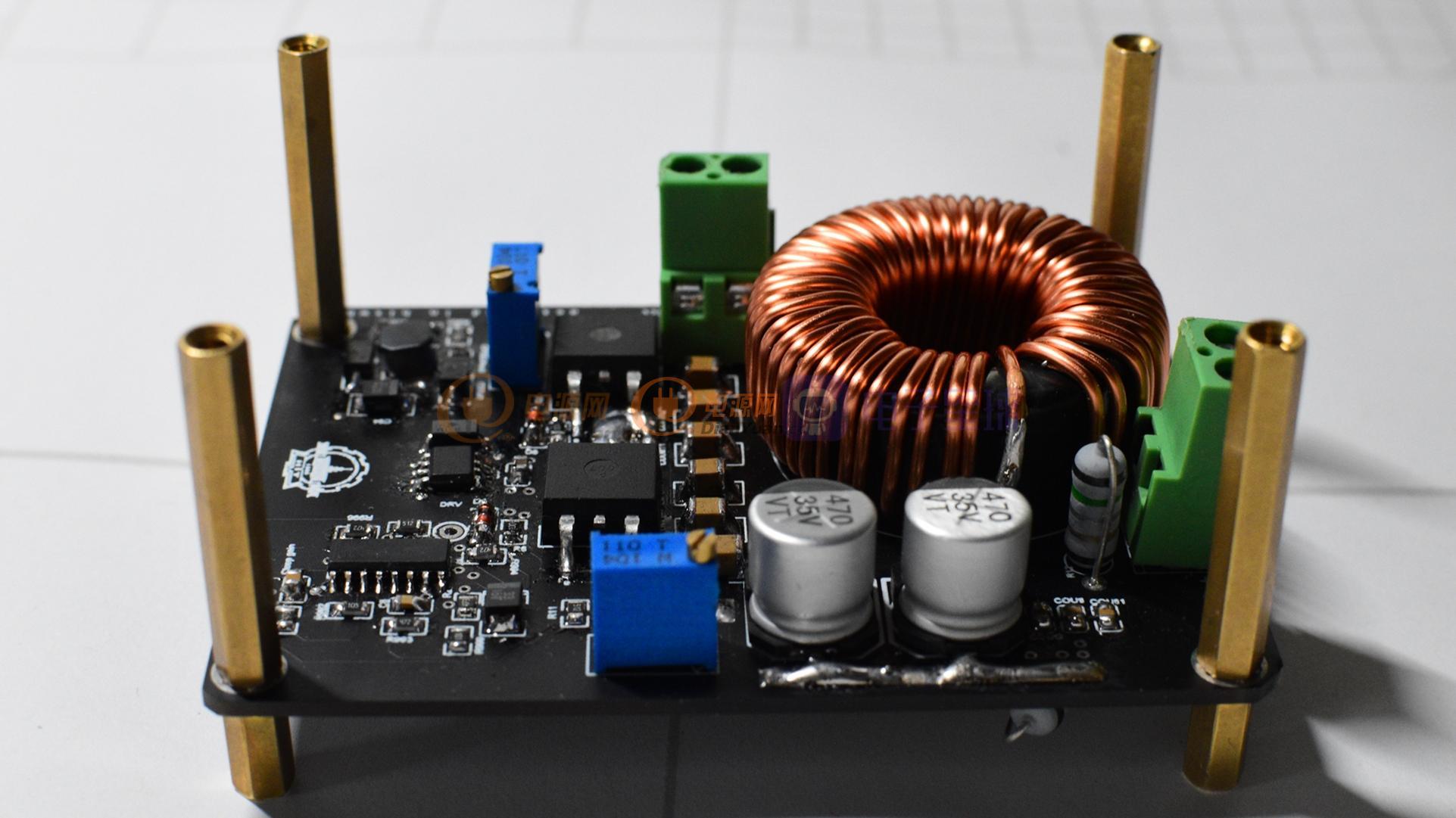
先用图说话 放上同步buck实物(tl494做主控 2104产生死区时间 并提供高低侧门极驱动)
虽然同步buck电路非常简单,先前论坛也有很多帖子讨论相关技术。
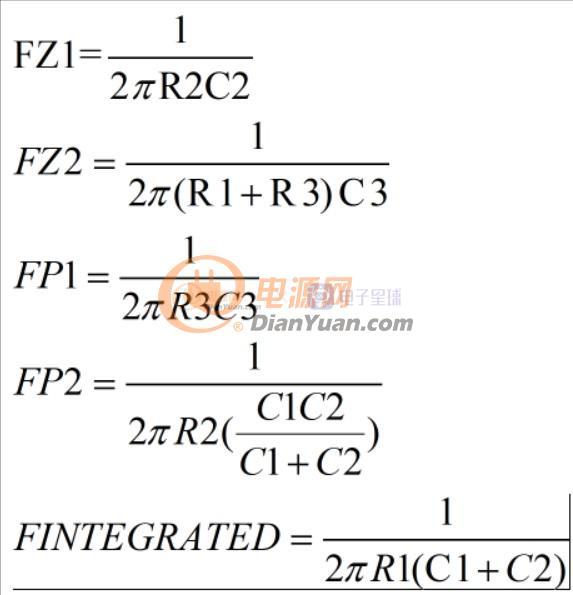
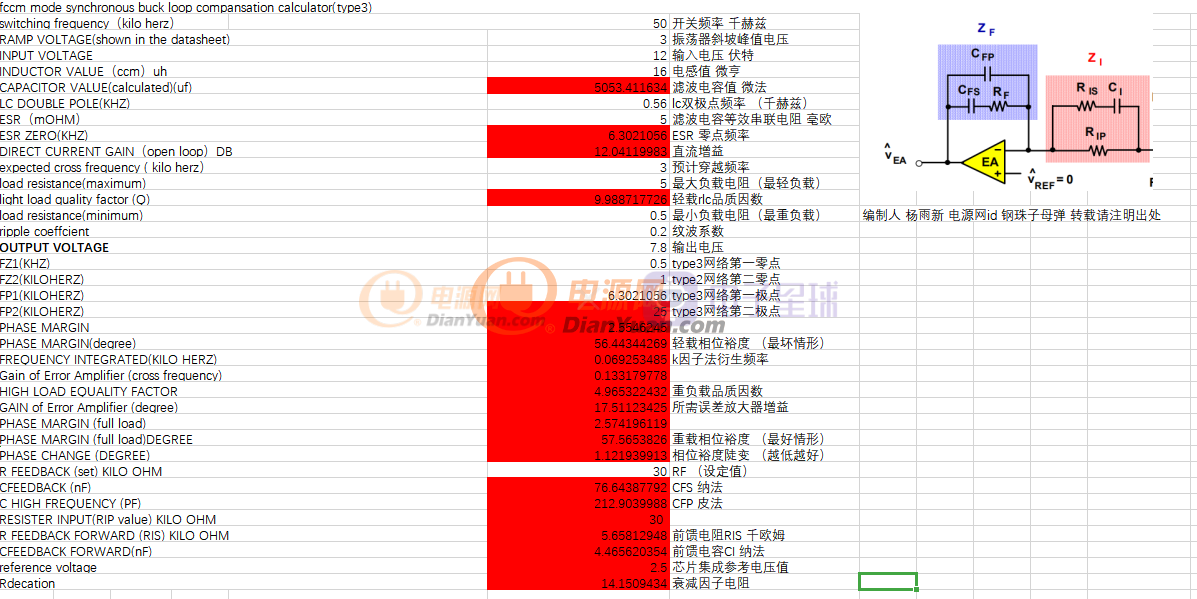
但就环路控制技术而言,buck电路代表了一类拓扑的小信号模型 即降压功率级:
正激 (forward)全桥 半桥 双管正激(double forward)甚至是带上了有源钳位电路的正激变换器,
其小信号模型都和buck电路基本一致。
只要学会buck电路的环路设计 降压功率级的环路设计就迎刃而解。后文中将详细讨论 ,
由于专业英语在获取相关资料,理解相关概念时极其重要,我会在解释相关概念时写出相关英文原词。
首先我们需要有一些环路的基本知识:(理解环路的前提是有自动控制原理和伯德图(bode diagram)的基本概念)
1、伯德图
伯德图囊括了系统的两大特性(幅频特性、相频特性)伯德图的横坐标为对数,
但为了方便绘制和看出特性,在坐标中是按照对数分度绘制的,
坐标上的频率代表了负载或基准电压扰动的小信号(small pertubance)频率。
对于工程师而言,对数分度应该是非常自然的事,在分度坐标中
频率每间隔十倍频程(per decade)就会被标定在上面,横坐标每隔一个频度
频率就以十倍速率递增。每两个频率之间的间隔被称之为”十倍频程“
其中幅频特性 纵坐标为环路增益(loopgain)
增益如果以非常主观而容易理解的方法阐述 就是电路输出量中对于扰动信号的放大倍数的绝对值
而后 这个绝对值将以分贝的形式呈现在伯德图上 普通放大倍数取以十为底的对数以后乘以二十 此时的增益单位就转为db
相频特性 表示了控制回路对于小信号扰动的相应信号与扰动信号之间的相位移动(phase shift)。
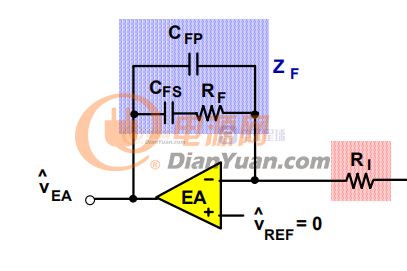
例如 针对一个反相放大器
其增益为RF/RIN
其相移为180度
当增益为1是 对应0db
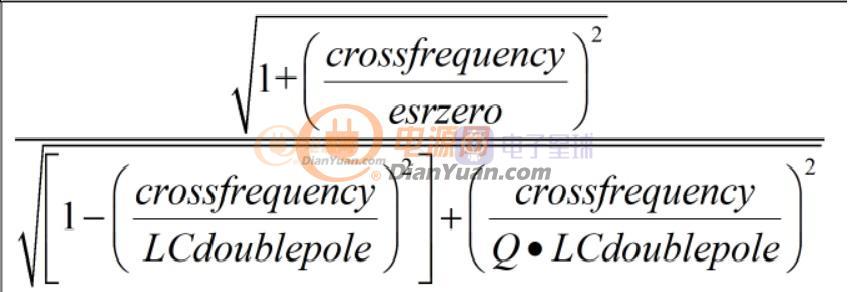
增益达到0db时对应频率被称为穿越频率(cross frequency)(这个概念极为重要!)
2、环路的稳定性判据(stability criteria)
1、发生自激振荡的条件
环路进入正反馈状态(特指增益为0db 相移达到360度)就会出现振荡
但由于负反馈系统本身带有180度的相移 若再添加180度相移将进入相位上的正反馈状态。
而增益为0db时为增益上的正反馈状态
对此 就出现了稳定性的两个条件:增益大于0db 相移小于180度
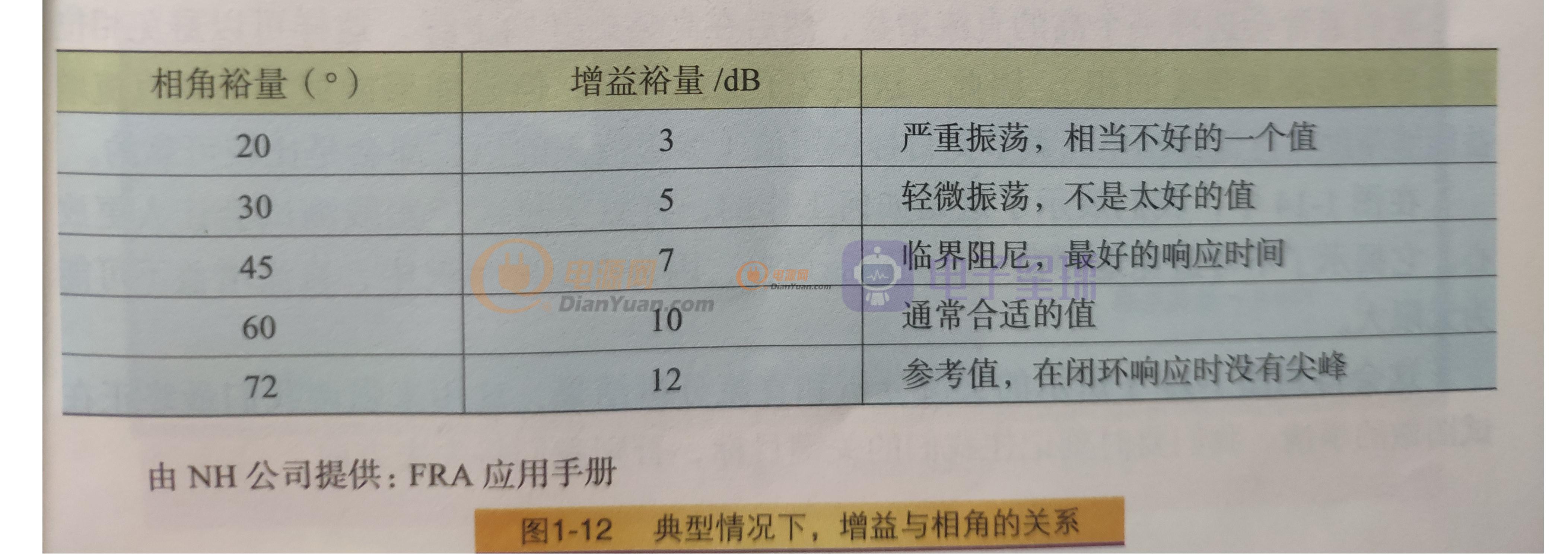
为了防止系统同时满足两个振荡条件 系统要有对应的裕度
1、相位裕度
当系统增益到达0db时 相移与180度的距离称为相位裕度
2、增益裕度
当系统相移达到-180度时 增益与0db之间的距离
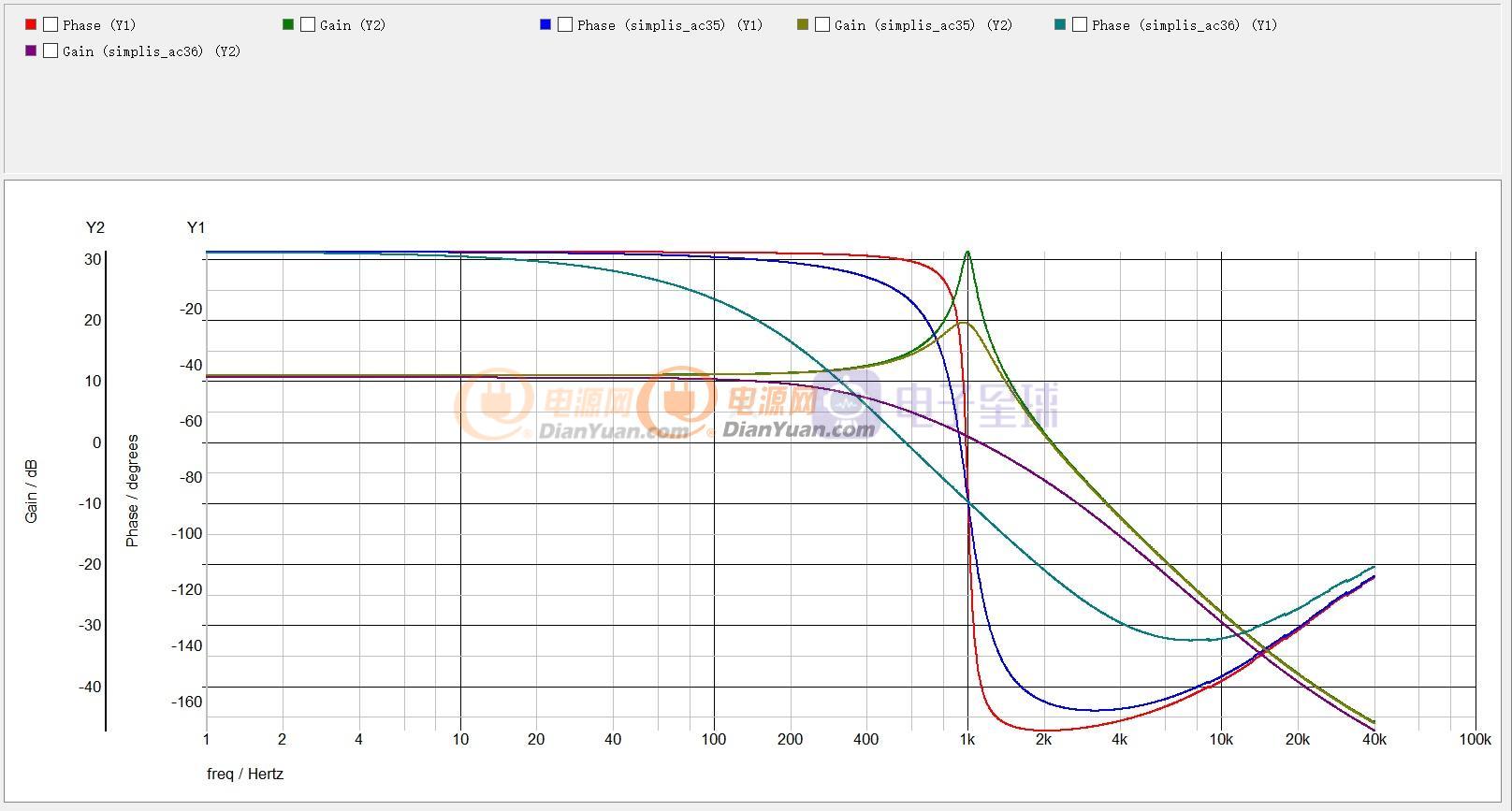
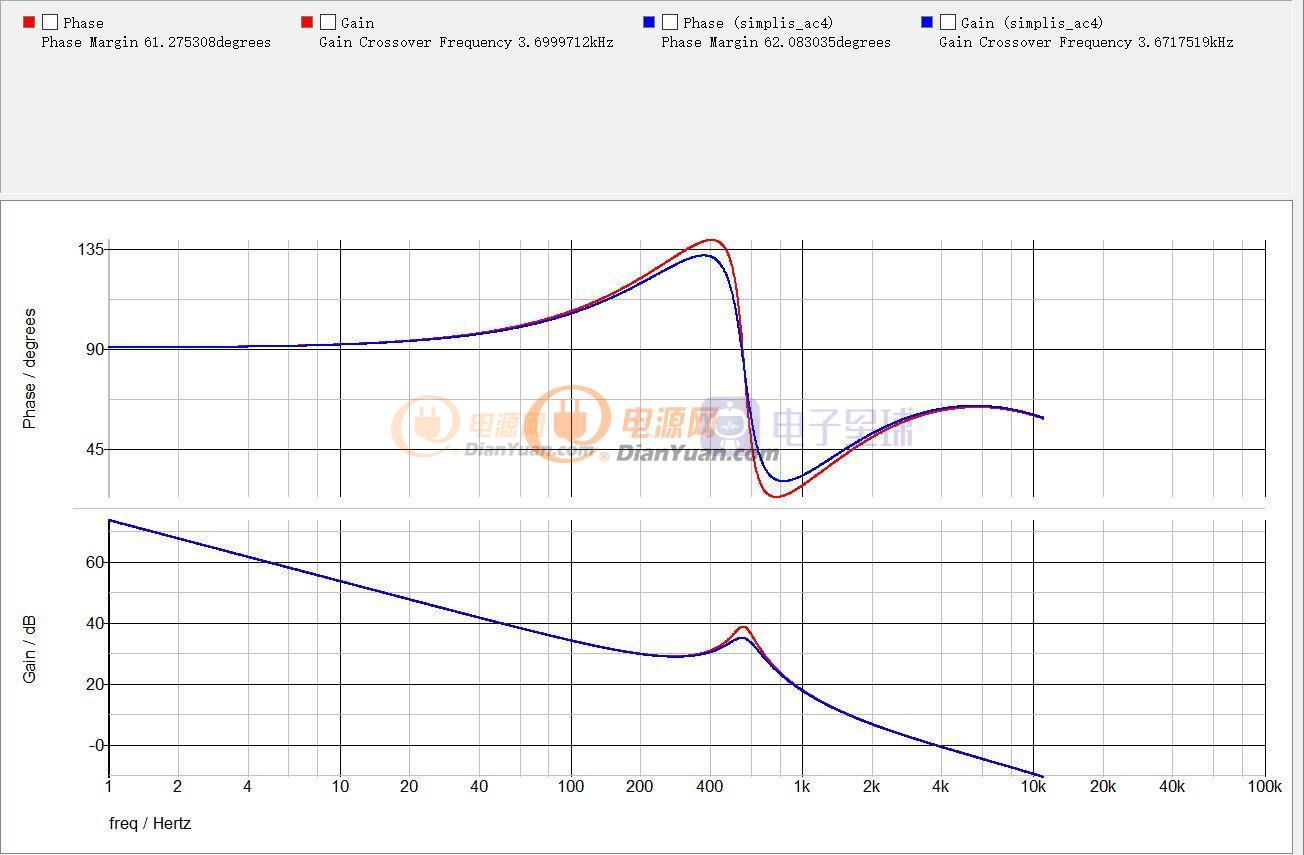
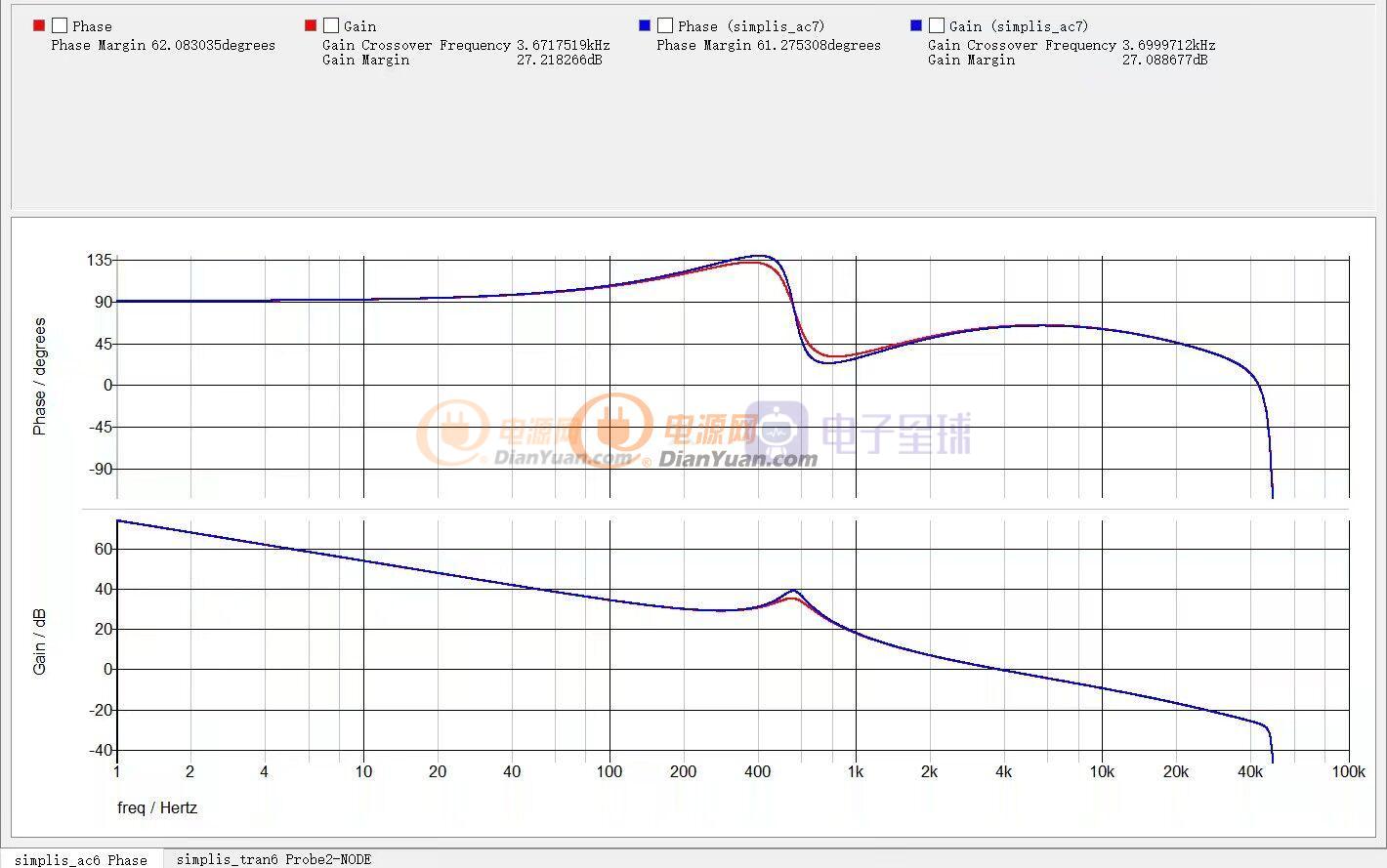
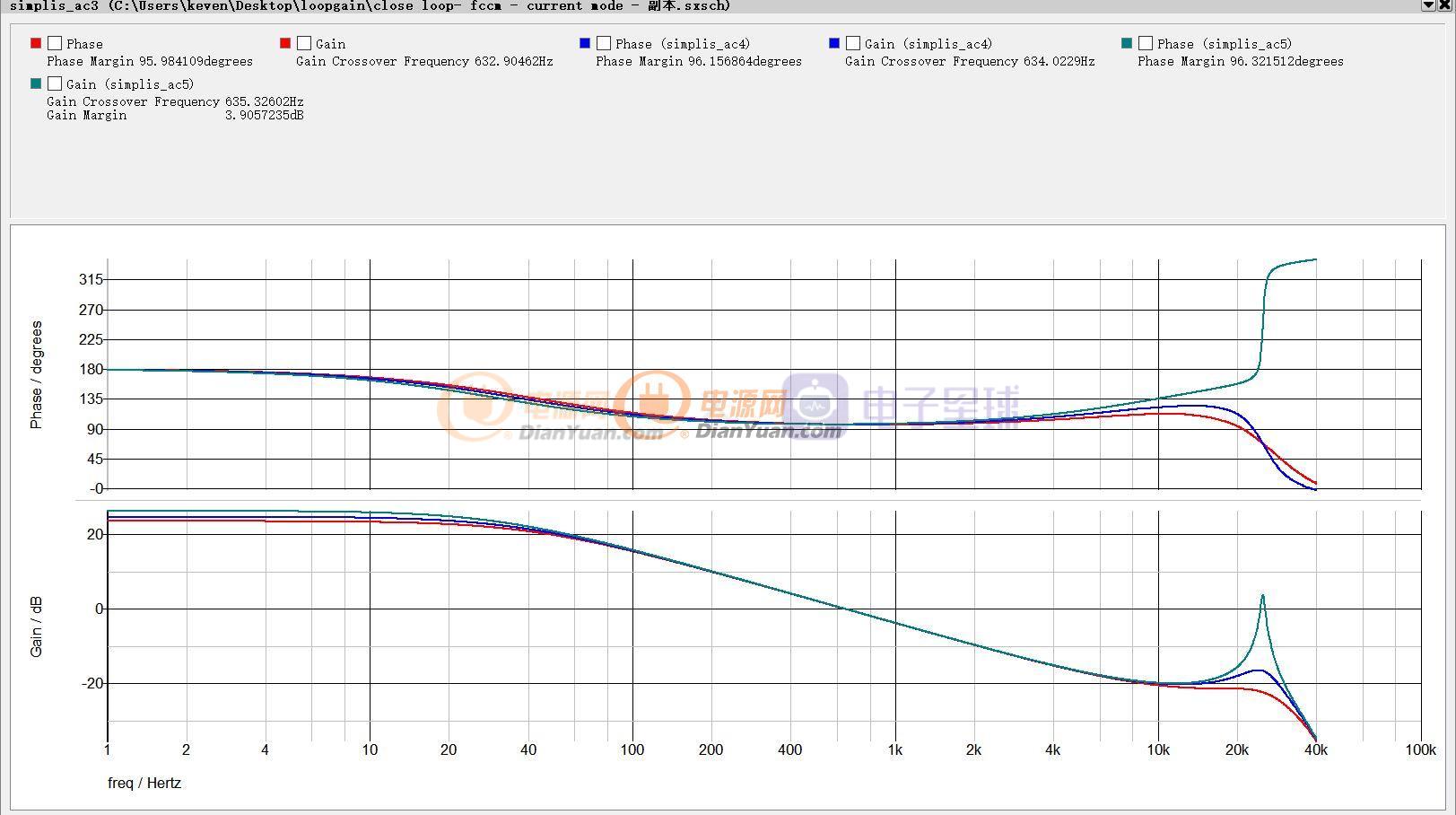
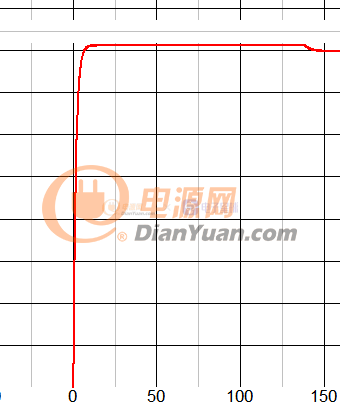
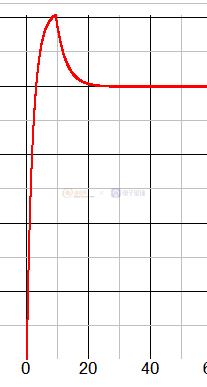
下面 我们用一个电流模式buck电路的环路分析bode diagram 做例子

在这个伯德图例子中 我们可以看到横坐标相邻两个大刻度间就是十倍的关系
图中穿越频率为1.16khz 相位裕度86度(-94度等效而来)
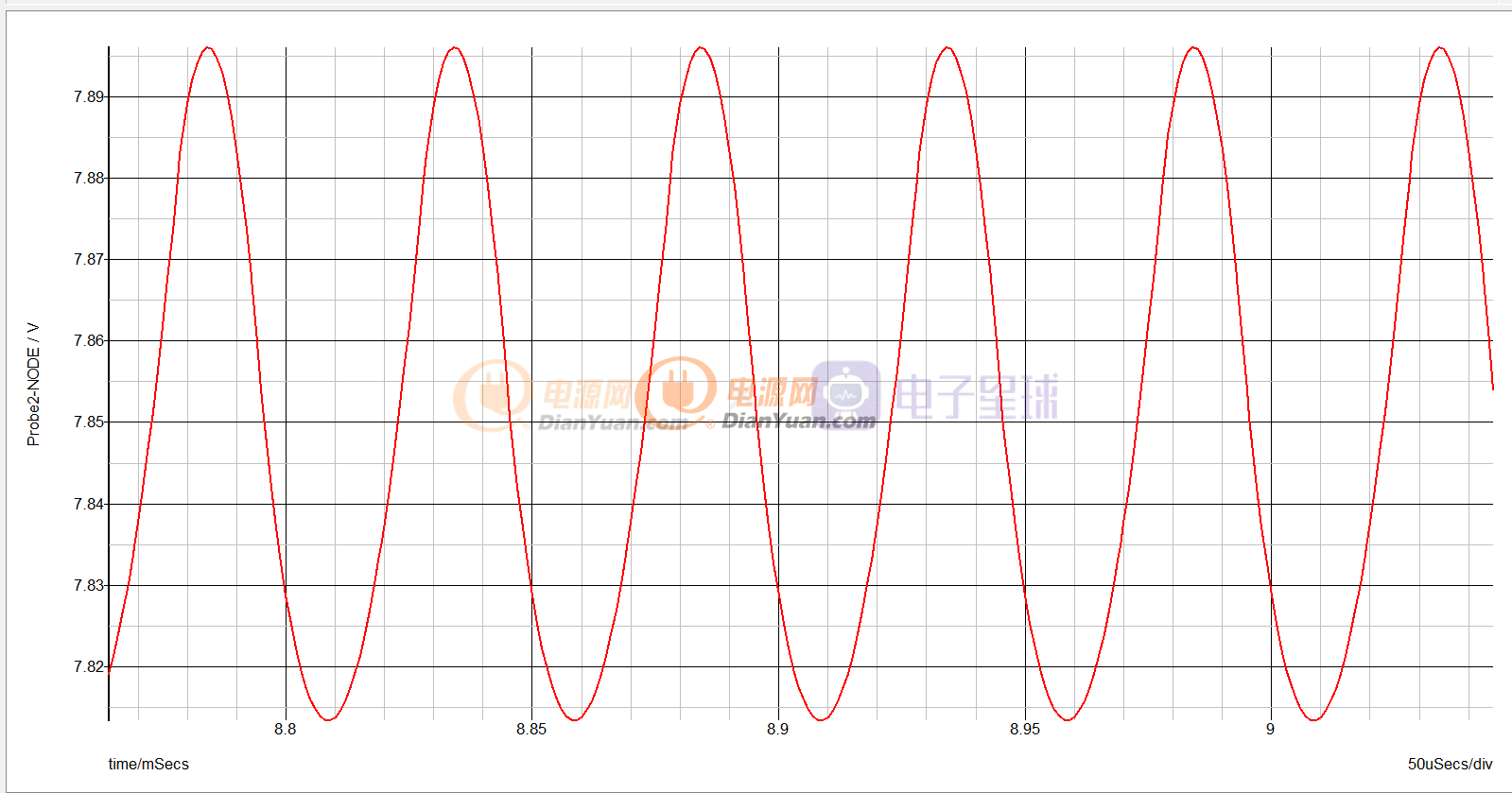
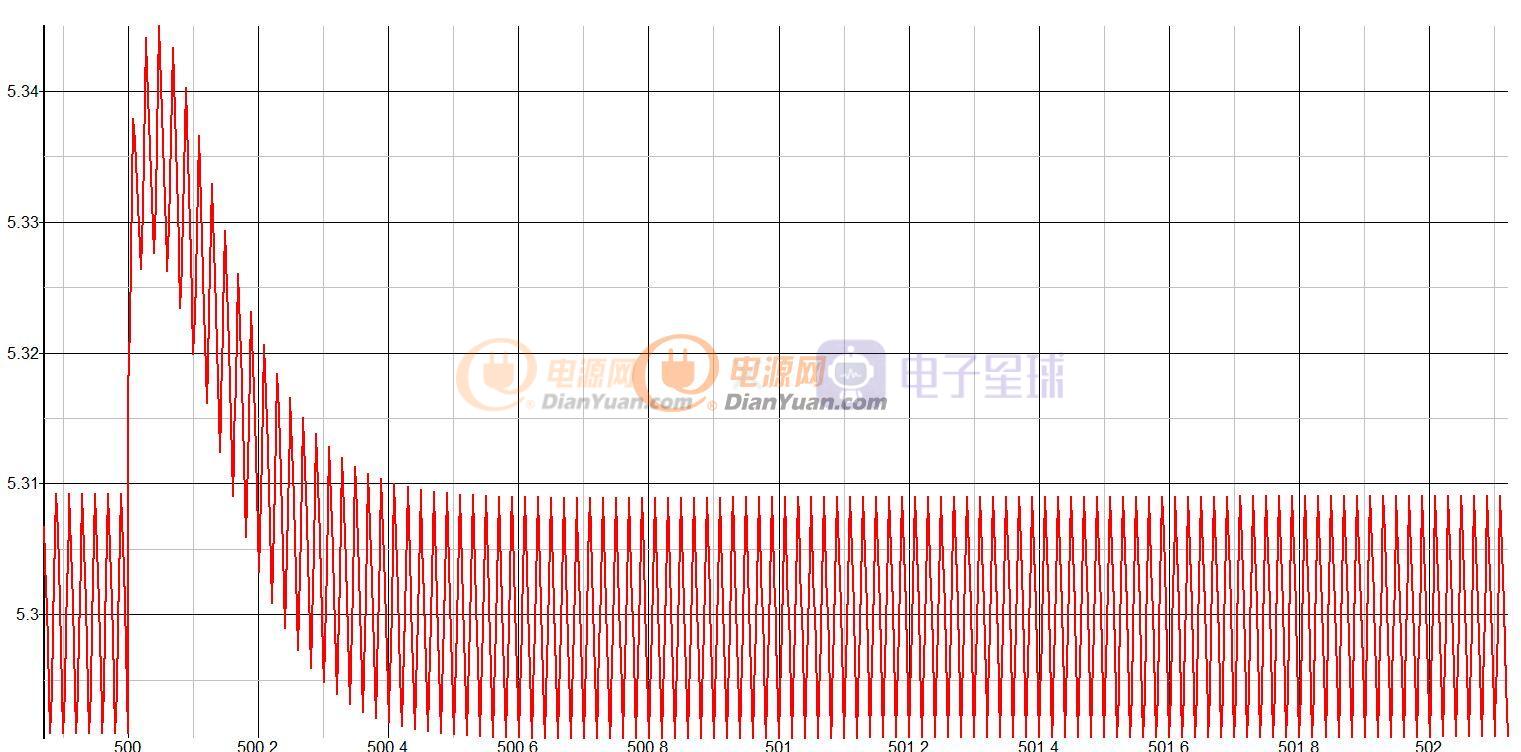
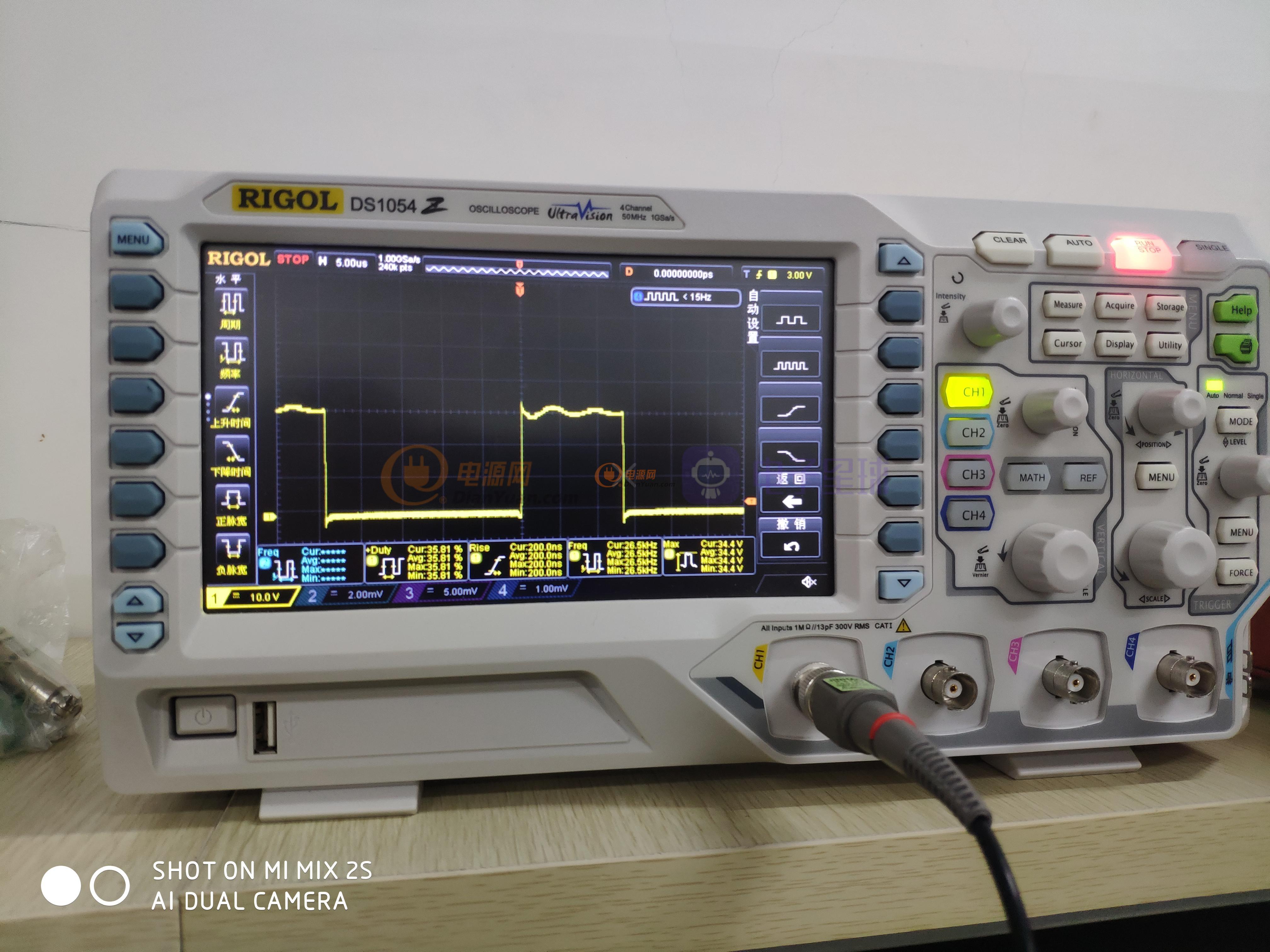
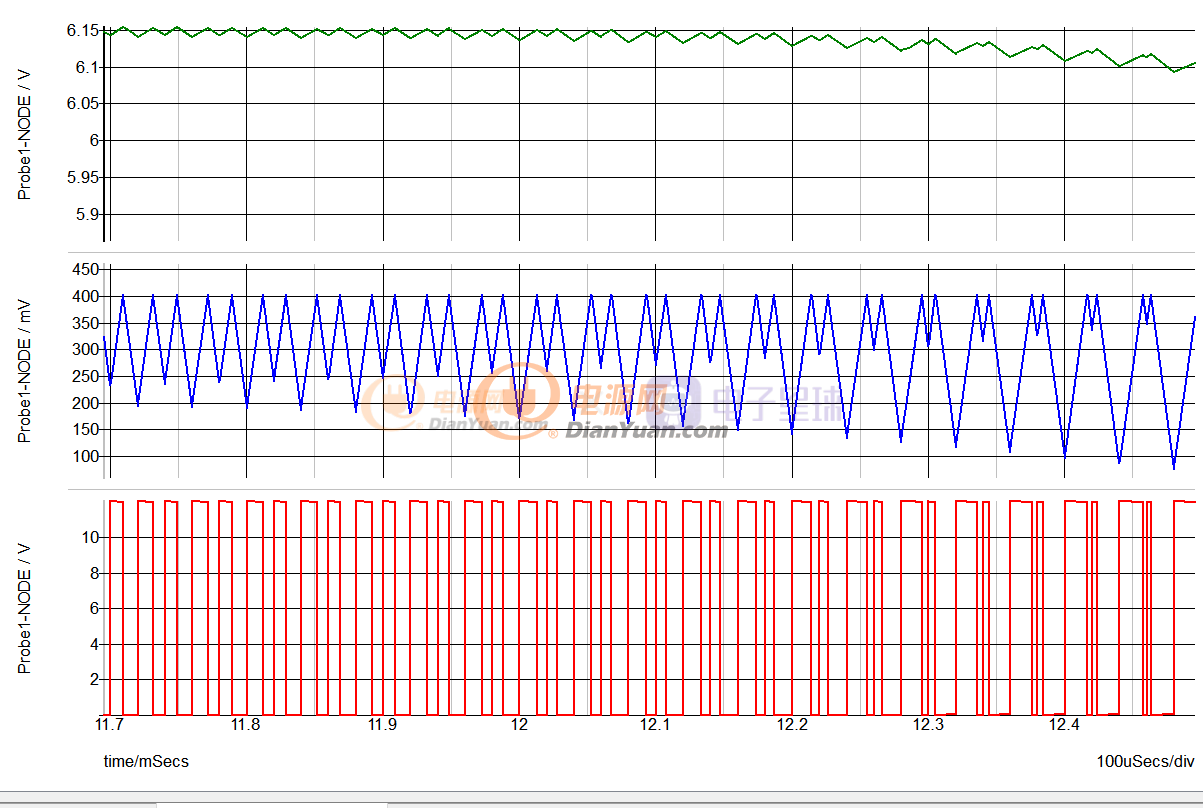
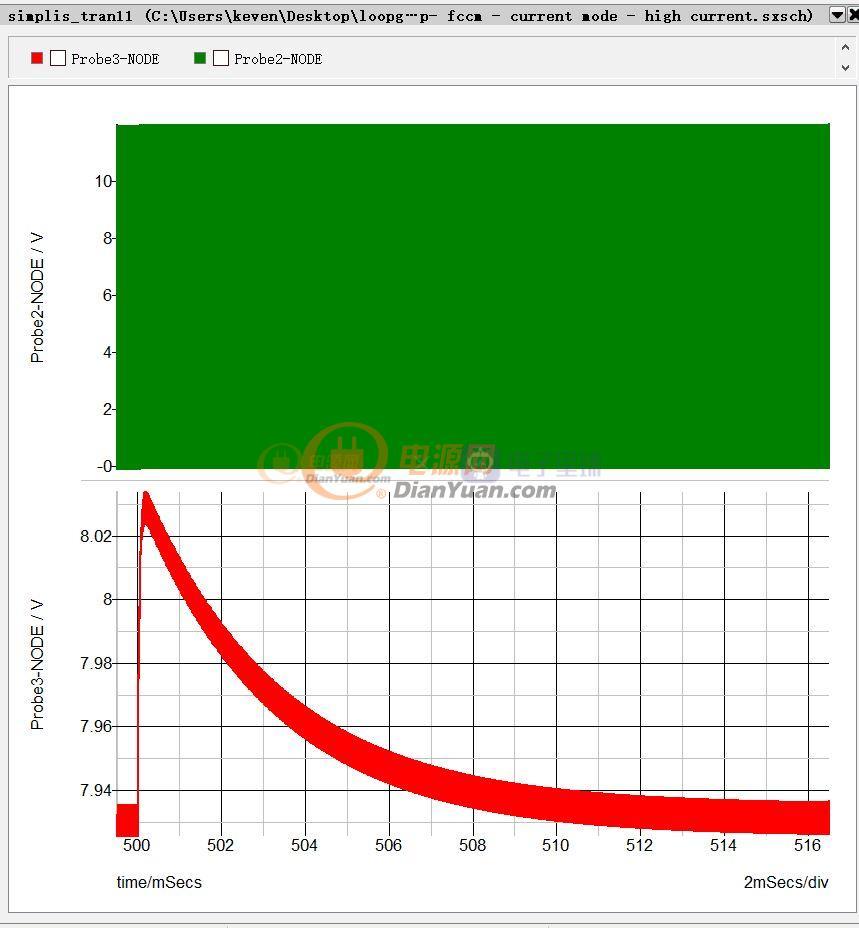
接下来是测试视频 信号由500hz到3khz加到tl494reference端
我的示波器的频率计有点问题 下方频率无视就好
可以看到在3khz 系统输出幅度 频率 都没有崩盘
符合3khz穿越频率设计
图中穿越频率为1.16khz 相位裕度86度(-94度等效而来)
接下来是测试视频 信号由500hz到3khz加到tl494reference端
我的示波器的频率计有点问题 下方频率无视就好
可以看到在3khz 系统输出幅度 频率 都没有崩盘
符合3khz穿越频率设计
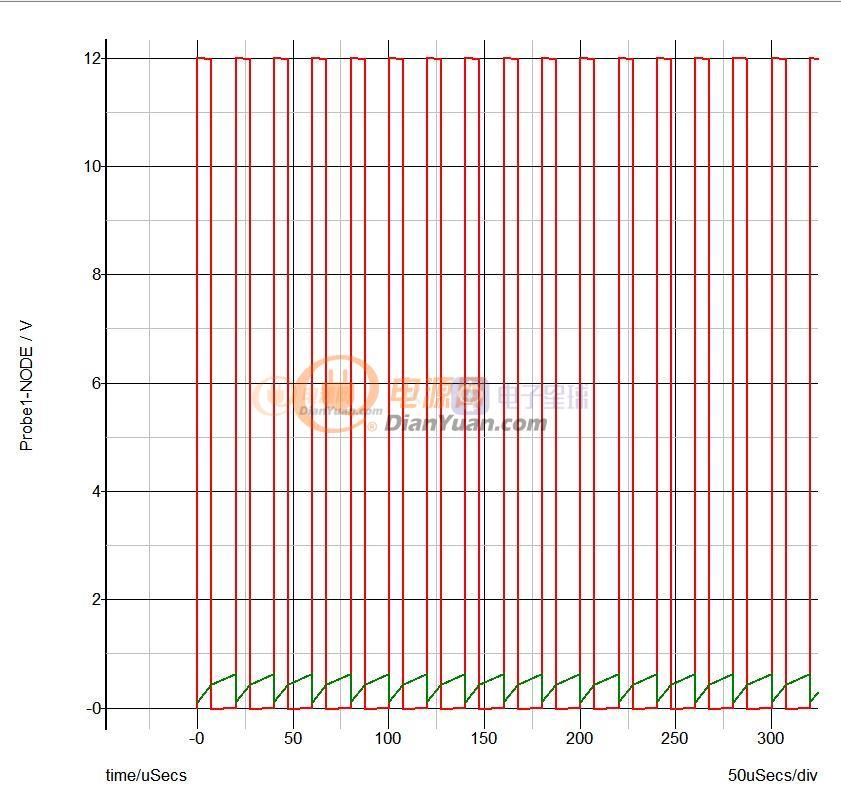
此方法是除了注入小信号纹波外另一种测试环路
带宽的方法:再直流参考量上叠加交流分量