一 、在搭建模型之前,需要明确这几个概念:
“等量”坐标变换:指某一坐标系中的通用矢量与变幻后的另一坐标系中的通用矢量相等的坐标变换。
通用矢量:指三相物理量可以用一个空间旋转矢量在三个静止对称轴(a,b,c)上的投影来表示,这个表示三相对称物理量的矢量即称为通用矢量。
最小相位系统(minimum-phase system)在一定的幅频特性情况下,其相移为最小的系统,也称最小相移系统。对于闭环系统,如果它的开环传递函数极点和零点的实部都小于或等于零,则称它是最小相位系统,如果开环传递函数中有正实部的零点或极点,或有延迟环节(因为延迟环可以用零点和极点的形式近似),则称系统是非最小相位系统。
特点:
(1)如果两个系统有相同的幅频特性,那么对于大于零的任何频率,最小相位系统的相角总小于非最小相位系统;
(2)最小相位系统的幅频特性和相频特性直接关联,对于最小相位系统,只要根据对数幅频曲线就能写出系统的传递函数。
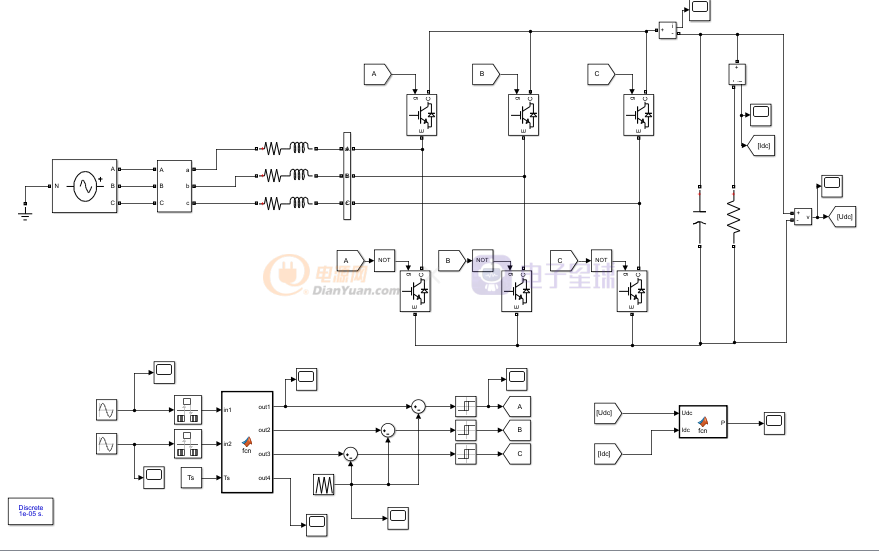
二、搭建电机矢量控制的电流闭环仿真模型
搭建图如下:
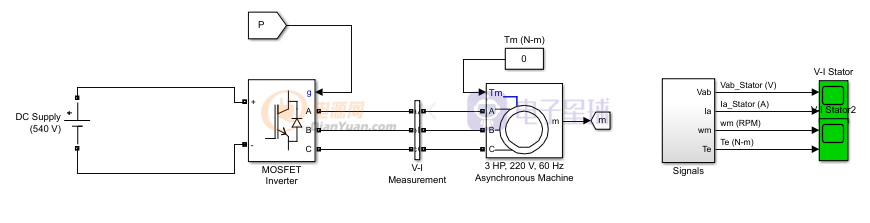
内部仿真图 如下

对调制度有了概念,当调制度大于1,开关管的反并联二极管工作,相当于三相不控整流,此时直流侧输出为交流侧相电压有效值的2.34倍,该值的推导如下:
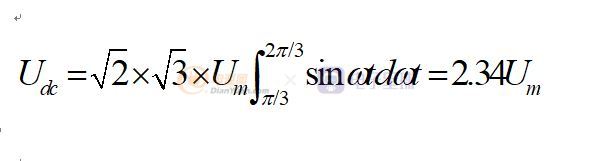
Um表示三相交流电压相电压有效值。
当调制度小于1,可控整流才起作用,三相交流侧线电压基波峰值与直流侧输出电压之比为调制度,理论上分析,三相可控整流桥直流侧输出只有下限没有上限。
SVPWM整流开环仿真模型: