

上一篇讲述了开关电源的COT控制模式,这一篇开始总结一下环路补偿的内容。一直以来, 环路的计算和补偿都是开关电源领域的“难点”,难在哪里?个人感觉是因为完全理解它需要一定的信号与系统和高等数学的基础,涉及到傅里叶变换,拉普拉斯变换以及时域频域间的相互转换。将这些大学期间学习的理论知识运用到开关电源系统中,去分析其内部反馈环路的稳定性,并且在频域求解出合适的补偿器件参数,还要结合波特图衡量最终的闭环是否足够稳定同时具备一定余量。这一系列操作下来确实会让很多初学者摸不着头脑。但作为工程师,不能因为难就绕过它,而是要迎难而上~
开关电源系统中,引入负反馈电路,达到稳定输出电压的目的。但,当某一频率的扰动信号经过反馈环路后增益为0dB,相位翻转180度,此时,即使扰动源头消失,该扰动信号也将一直存在于系统,这就是反馈带来的系统不稳定。为了避免这种情况的发生,通过加入补偿电路的方式,设计一个无条件稳定的反馈系统是我们的目标。首先,把整个系统分为被控对象和反馈两部分,被控对象具有正向传递函数G(s),其输出通过反馈网络H(s)返回,来调整输出,达到预期的电压、电流量(如图1)。电源系统中,被控对象由PWM调制器、功率级驱动器、开关管和LC滤波器构成(如图2),反馈模块由分压器、补偿误差放大器构成(如图3中包含),一般倾向于将误差放大器分为两个部分,一个只求和,另一个仅考虑增益。
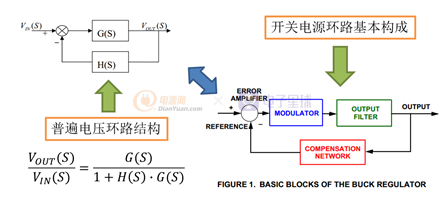
图1.反馈环路的基本构成

图2. 功率级被控对象构成图
被控对象传递函数也成为控制到输出的传递函数,即变换器的输出电压除以控制电压(误差放大器输出)。该传递函数就是PWM调制器(MODULATOR)和LC滤波器的传递函数之积。相当于把LC滤波器的幅频特性曲线向上垂直移动PWM调制器的增益。
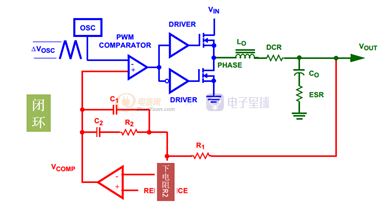
图3. 闭环控制电路构成图
图3所示为电压控制模式下的闭环电路构成图,看到反馈部分包括分压器、误差放大器和补偿网络。分压器就是分压电阻,只带来幅度的增益,误差放大器又可以分为普通电压型和跨导放大型,其补偿网络可给系统带来增益和相位上的改善。需要注意,对于电压型放大器,传递函数与下电阻无关,下电阻只起到偏置作用。而对跨导放大器,两个分压电阻均参与环路补偿。若使用跨导放大器,只有反馈电阻之比是最重要的,只要上下电阻比值不变,就能获得相同的输出电压且环路幅相特性保持不变!但对于普通放大器,最好保持上电阻不变,修改下电阻阻值来改变输出电压,这样能够保证交流幅相特性不变。
上面介绍了开关电源反馈环路的基本组成,下面定量的列出它们的传递函数:
- (1) PWM调制器、功率级驱动器、开关管

图4. 功率级前端传递函数
这部分电路构成了除LC滤波器之外的被控对象传递函数,在电压型控制模式下,由于采用固定频率和幅度的PWM锯齿波作为比较器同相输入,因此可以精确的推算出它的传递函数(如图4)。
- (2) LC滤波器传递函数
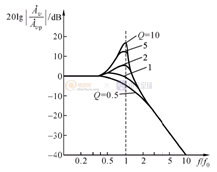
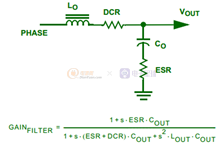
图5. LC传递函数
降压变换器后级有一个LC滤波器,但要注意在实际情况中还要考虑寄生参数的影响。如,L的DCR和C的ESR。电源系统的输出电容越大越好是一个误区,这会在输出滤波器响应中产生很高的峰值(高Q值)。这种情况发生时,相移会突变,导致条件稳定性问题。(注意,R为负载电阻值)
- (3) 被控对象传递函数
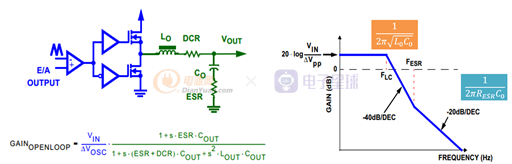
图6. 被控对象传递函数
被控对象传递函数也成为控制到输出的传递函数,即变换器的输出电压除以控制电压(误差放大器输出)。该传递函数就是PWM调制器(MODULATOR)和LC滤波器的传递函数之积。相当于把LC滤波器的幅频特性曲线向上垂直移动PWM调制器的增益。
以上就是电压型控制模式下功率级(也叫被控对象)的传递函数,可以看到它的频率增益曲线中,有一个LC形成的双极点,一个ESR形成的零点。其实如果没有补偿电路也是可以的,因为ESR零点频率如果足够低,就可以保证在穿越频率处相位裕量大于45度,但这个因素不可控,所以还是需要设计补偿电路保证穿越频率处足够的相位裕度。下面是针对电压型控制模式的几种补偿方法:

图7.Type2普通运放补偿传递函数
图6所示是TYPE2型补偿网络,适用于滤波电容含有ESR且选择的穿越频率大于ESR零点频率的情况,便于利用ESR零点形成-1穿越斜率。否则,如果要求高带宽下还有足够的phase margin,或输出电容ESR为0或ESR零点频率超过零极点截止频率,则需要TYPE3型补偿网络提供补偿。另外在很多电流控制模式中也会选择type2补偿方式。
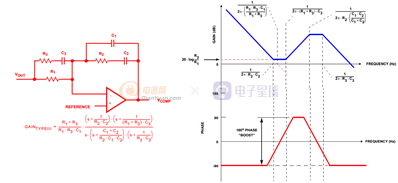
图8. Type3普通运放传递函数
对于TYPE3补偿网络,提供一个零极点、两个零点和两个极点(如图7)。设计时,将两个零点放在LC双极点附近,第一个极点放在ESR形成的零点附近,第二个极点放在0.5Fsw、Fsw、Fc或10Fc处。注意:相位的改变是在零极点前缓慢的开始,到零极点后缓慢的结束。由于含有双极点和双零点的type3型补偿具有更小的相位滞后,因此适合于不含ESR的LC滤波器补偿,以减小相位滞后。需要注意,补偿网络增益一定不能高于误差放大器的开环增益,否则会产生饱和。
上面就介绍了传统电压型控制模式下反馈环路补偿网络的构成和传递函数的计算,但怎么通过这些参数判断最终的环路是否稳定呢?下面列出几条一般准则作为环路稳定性判断依据:
- (1) 在穿越频率F_co处,总开环相移要小于360°,且需要预留45°余量,即相位裕度大于45°(最好为60°)
- (2) 在穿越频率F_co处,增益曲线变化率为-1,以避免穿-2斜率在穿越频率处相位的快速变化
- (3) 提供必要的增益裕量(12dB)
备注:应当注意,并不是绝对要求开环增益曲线在穿越频率附近的增益斜率为必须为-1,但是由于-1增益斜率对应的相位曲线相位延迟较小,且变化相对缓慢,因此它能够保证,当某些环节的相位变化被忽略时,相位曲线仍将具有足够的相位裕量,使系统保持稳定。
以上就是这篇文章的内容,主要针对传统电压控制模式下的环路补偿方法及其电路组成做了详细介绍,之后列出了该模式下功率级和反馈补偿网络的传递函数,最后给出了环路稳定性判定的一般依据。下一篇打算介绍电流控制模式下的环路补偿方法和相应电路,估计下一篇写完就该跟大家拜年了,哈哈~