MOSFET作为功率开关管,已经是是开关电源领域的绝对主力器件。虽然MOSFET作为电压型驱动器件,其驱动表面上看来是非常简单,但是详细分析起来并不简单。下面我会花一点时间,一点点来解析MOSFET的驱动技术,以及在不同的应用,应该采用什么样的驱动电路。
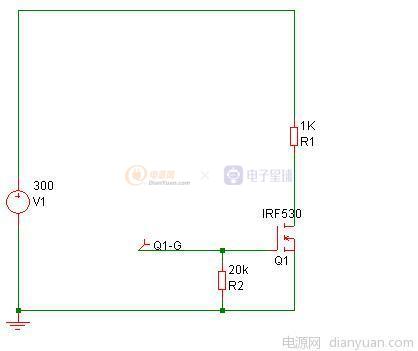
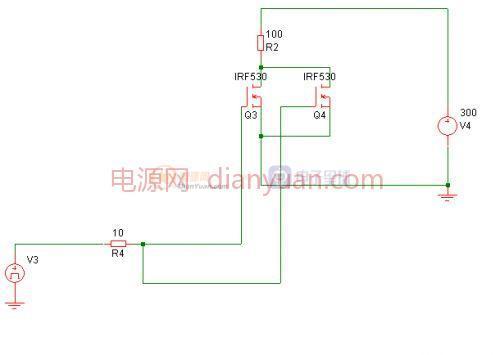
首先,来做一个实验,把一个MOSFET的G悬空,然后在DS上加电压,那么会出现什么情况呢?很多工程师都知道,MOS会导通甚至击穿。这是为什么呢?因为我根本没有加驱动电压,MOS怎么会导通?用下面的图,来做个仿真:

去探测G极的电压,发现电压波形如下:

G极的电压居然有4V多,难怪MOSFET会导通,这是因为MOSFET的寄生参数在捣鬼。
关于MOSFET的寄生参数的描述,可以参考蜘蛛先生的帖子:http://bbs.dianyuan.com/topic/579603
这种情况有什么危害呢?实际情况下,MOS肯定有驱动电路的么,要么导通,要么关掉。问题就出在开机,或者关机的时候,最主要是开机的时候,此时你的驱动电路还没上电。但是输入上电了,由于驱动电路没有工作,G级的电荷无法被释放,就容易导致MOS导通击穿。那么怎么解决呢?
在GS之间并一个电阻。
那么仿真的结果呢:
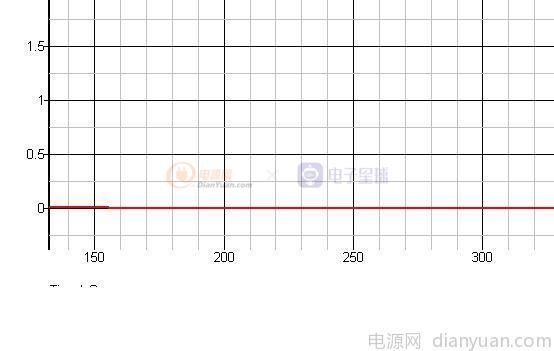
几乎为0V。
什么叫驱动能力,很多PWM芯片,或者专门的驱动芯片都会说驱动能力,比如384X的驱动能力为1A,其含义是什么呢?
假如驱动是个理想脉冲源,那么其驱动能力就是无穷大,想提供多大电流就给多大。但实际中,驱动是有内阻的,假设其内阻为10欧姆,在10V电压下,最多能提供的峰值电流就是1A,通常也认为其驱动能力为1A。
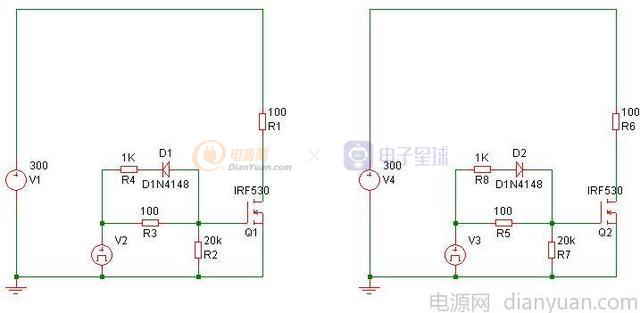
那什么叫驱动电阻呢,通常驱动器和MOS的G极之间,会串一个电阻,就如下图的R3。
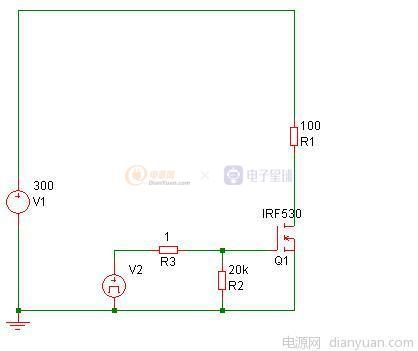
驱动电阻的作用,如果你的驱动走线很长,驱动电阻可以对走线电感和MOS结电容引起的震荡起阻尼作用。但是通常,现在的PCB走线都很紧凑,走线电感非常小。
第二个,重要作用就是调解驱动器的驱动能力,调节开关速度。当然只能降低驱动能力,而不能提高。
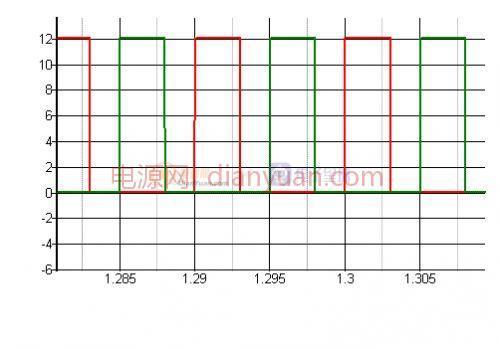
对上图进行仿真,R3分别取1欧姆,和100欧姆。下图是MOS的G极的电压波形上升沿。

红色波形为R3=1欧姆,绿色为R3=100欧姆。可以看到,当R3比较大时,驱动就有点力不从心了,特别在处理米勒效应的时候,驱动电压上升很缓慢。
下图,是驱动的下降沿

那么驱动的快慢对MOS的开关有什么影响呢?下图是MOS导通时候DS的电压:

红色的是R3=1欧姆,绿色的是R3=100欧姆。可见R3越大,MOS的导通速度越慢。
下图是电流波形

红色的是R3=1欧姆,绿色的是R3=100欧姆。可见R3越大,MOS的导通速度越慢。
可以看到,驱动电阻增加可以降低MOS开关的时候得电压电流的变化率。比较慢的开关速度,对EMI有好处。下图是对两个不同驱动情况下,MOS的DS电压波形做付利叶分析得到
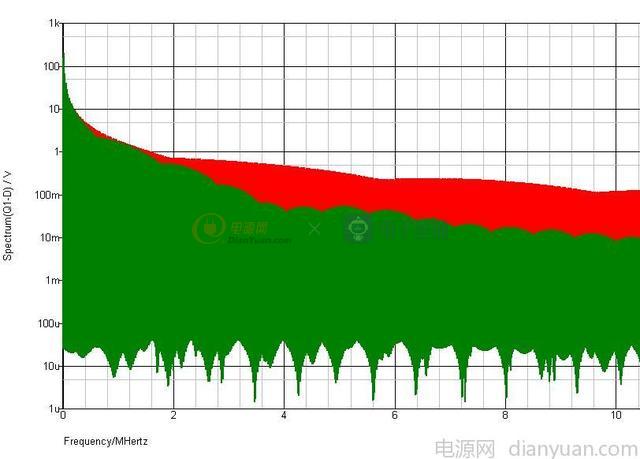
红色的是R3=1欧姆,绿色的是R3=100欧姆。可见,驱动电阻大的时候,高频谐波明显变小。
但是驱动速度慢,又有什么坏处呢?那就是开关损耗大了,下图是不同驱动电阻下,导通损耗的功率曲线。

红色的是R3=1欧姆,绿色的是R3=100欧姆。可见,驱动电阻大的时候,损耗明显大了。
结论:驱动电阻到底选多大?还真难讲,小了,EMI不好,大了,效率不好。
所以只能一个折中的选择了。
那如果,开通和关断的速度要分别调节,怎么办?就用以下电路。
MOSFET的自举驱动。
对于NMOS来说,必须是G极的电压高于S极一定电压才能导通。那么对于对S极和控制IC的地等电位的MOS来说,驱动根本没有问题,如上图。
但是对于一些拓扑,比如BUCK(开关管放在上端),双管正激,双管反激,半桥,全桥这些拓扑的上管,就没办法直接用芯片去驱动,那么可以采用自举驱动电路。
看下图的BUCK电路:
加入输入12V,MOS的导通阀值为3V,那么对于Q1来说,当Q1导通之后,如果要维持导通状态,Q1的G级必须保证15V以上的电压,因为S级已经有12V了。
那么输入才12V,怎么得到15V的电压呢?
其实上管Q1驱动的供电在于 Cboot。
看下图,芯片的内部结构:
Cboot是挂在boot和LX之间的,而LX却是下管的D级,当下管导通的时候,LX接地,芯片的内部基准通过Dboot(自举二极管)对Cboot充电。当下管关,上管通的时候,LX点的电压上升,Cboot上的电压自然就被举了起来。这样驱动电压才能高过输入电压。
当然芯片内部的逻辑信号在提供给驱动的时候,还需要Level shift电路,把信号的电平电压也提上去。
Buck电路,现在有太多的控制芯片集成了自举驱动,让整个设计变得很简单。但是对于,双管的,桥式的拓扑,多数芯片没有集成驱动。那样就可以外加自举驱动芯片,48V系统输入的,可以采用Intersil公司的ISL21XX,HIP21XX系列。如果是AC/DC中,电压比较高的,可以采用IR的IR21XX系列。
下图是ISL21XX的内部框图。
其核心的东西,就是红圈里的boot二极管,和Level shift电路ISL21XX驱动桥式电路示意图:
驱动双管电路:
驱动有源钳位示意图:
当然以上都是示意图,没有完整的外围电路,但是外围其实很简单,参考datasheet即可。
隔离驱动。当控制和MOS处于电气隔离状态下,自举驱动就无法胜任了,那么就需要隔离驱动了。下面来讨论隔离驱动中最常用的,变压器隔离驱动。
看个最简单的隔离驱动电路,被驱动的对象是Q1。

驱动源参数为12V ,100KHz, D=0.5。
驱动变压器电感量为200uH,匝比为1:1。
红色波形为驱动源V1的输出,绿色为Q1的G级波形。可以看到,Q1-G的波形为具有正负电压的方波,幅值6V了。
为什么驱动电压会下降呢,是因为V1的电压直流分量,完全被C1阻挡了。所以C1也称为隔直电容。
下图为C1上的电压。

其平均电压为6V,但是峰峰值,却有2V,显然C1不够大,导致驱动信号最终不够平。那么把C1变为470n。Q1-G的电压波形就变成如下:
驱动电压变得平缓了些。如果把驱动变压器的电感量增加到500uH。驱动信号就如下图:
驱动信号显得更为平缓。
从这里可以看到,这种驱动,有个明显的特点,就是驱动电平,最终到达MOS的时候,电压幅度减小了,具体减小多少呢,应该是D*V,D为占空比,那么如果D很大的话,驱动电压就会变得很小,如下图,D=0.9
发现驱动到达MOS的时候,正压不到2V了。显然这种驱动不适合占空比大的情况。
从上面可以看到,在驱动工作的时候,其实C1上面始终有一个电压存在,电压平均值为
V*D,也就是说这个电容存储着一定的能量。那么这个能量的存在,会带来什么问题呢?
下面模拟驱动突然掉电的情况:
可见,在驱动突然关掉之后,C1上的能量,会引起驱动变的电感,C1以及mos的结电容之间的谐振。如果这个谐振电压足够高的话,就会触发MOS,对可靠性带来危害。
那么如何来降低这个震荡呢,在GS上并个电阻,下图是并了1K电阻之后波形:
但是这个电阻会给驱动带来额外的损耗。
如何传递大占空比的驱动:
看一个简单的驱动电路。
当D=0.9的时候
红色波形为驱动源输出,绿色为到达MOS的波形。基本保持了驱动源的波形。
同样,这个电路在驱动掉电的时候,比如关机,也会出现震荡。
而且似乎这个问题比上面的电路还严重。
下面尝试降低这个震荡,首先把R5改为1K
确实有改善,但问题还是严重,继续在C2上并一个1K的电阻。
绿色的波形,确实更改善了一些,但是问题还是存在。这是个可靠性的隐患。
对于这个问题如何解决呢?可以采用soft stop的方式来关机。soft stop其实就是soft start的反过程,就是在关机的时候,让驱动占空比从大往小变化,直到关机。很多IC已经集成了该功能。

可看到,驱动信号在关机的时候,没有了上面的那些震荡。
对于半桥,全桥的驱动,由于具有两相驱动,而且相位差为180度,那么如何用隔离变压器来驱动呢?
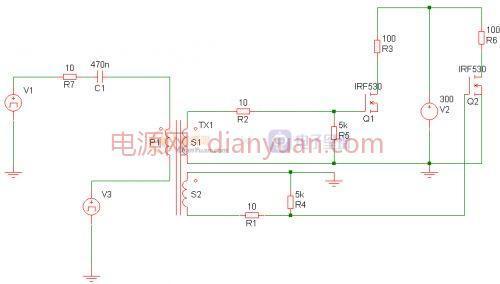
采用一拖二的方式,可以来驱动两个管子。
下图,是两个驱动源的波形:
通过变压器传递之后,到达MOS会变成如下:
在有源钳位,不对称半桥,以及同步整流等场合,需要一对互补的驱动,那么怎么用一路驱动来产生互补驱动,并且形成死区。可用下图。

波形如下图:
MOSFET的并联驱动,由于MOS经常采用并联的方式工作,那么驱动又该如何设计呢?
是这样
还是这样?
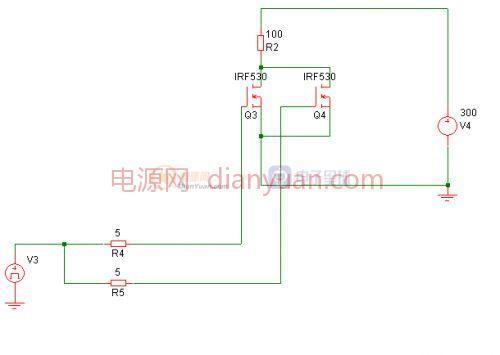
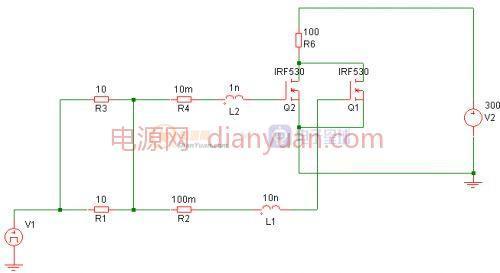
MOS并联,对驱动的一致性要求就很高了,如果导通,关断时间不一致,会导致其中一个MOS开关损耗剧增。所以在软开关电路上,用MOS并联问题比较少,但是硬开关电路,就要小心了。下面用仿真来看现象,假设两个MOS并联,而且MOS的参数完全一样。
但是驱动走线的寄生参数有很大不同。

R2,R4,L1,L2都为驱动走线的寄生参数。那么下图为,导通时候,两个mos的电流
基本上还算一致。

接下去,把两个驱动电阻并联起来一起去驱动两MOS,
再看导通时候的电流波形:
两管子的电流波形,均出现剧烈震荡。
Pmos的驱动:
下图为Pmos
Pmos要求GS的电压是负的,也就是G的电压要比S的低,才能导通。那么,如果SD承受高压,G只要比S的电压低一点就能导通,但是一旦SD导通,G必须维持负压才能导通。
而GS的耐压是很低的,这就很麻烦了。一般在电源中最常见的Pmos应用,就有有源钳位有源钳位的Pmos,是S级接地的,那么要保持导通,G级必须要有负压才行。那么如何产生负压呢,可以采用下图驱动方式:
那么波形可见: