

大家好,我是小哈哥,最近几篇网文,会给大家分享一个知识星球球友的问答,希望感兴趣的朋友持续关注。
问题由来
星球网友的提问,有问必答:
咱们把这个问题拆分开,由接下来几篇网文回答:
- 基于Modbus协议将电压数据上传至上位机
- Qt程序解析Modbus协议,并将解析之后的结果显示在曲线中
- 将温度数据保存至Excel中
这三篇内容为本问题涉及的三个知识点,今天来分享第一个问题,其他问题,稍后陆续分享。
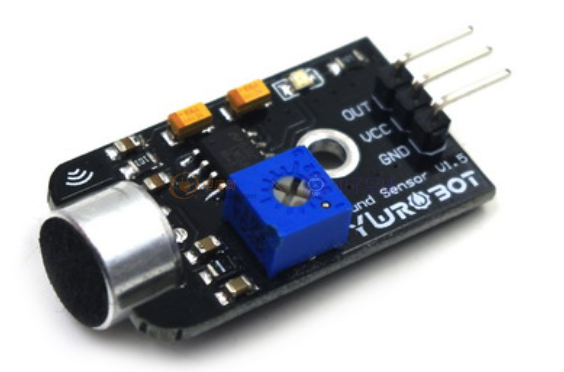
声音传感器模块
声音传感器的作用相当于一个话筒(麦克风),它用来接收声波。
该传感器内置一个对声音敏感的电容式驻极体话筒。声波使话筒内的驻极体薄膜振动,导致电容的变化,进而产生与之变化对应的微小电压。
这一电压随后经放大器被转化成0~VCC的电压,电压值的大小等价于声音强度的大小,经过A/D转换即可求得相对声音强度的AD值。
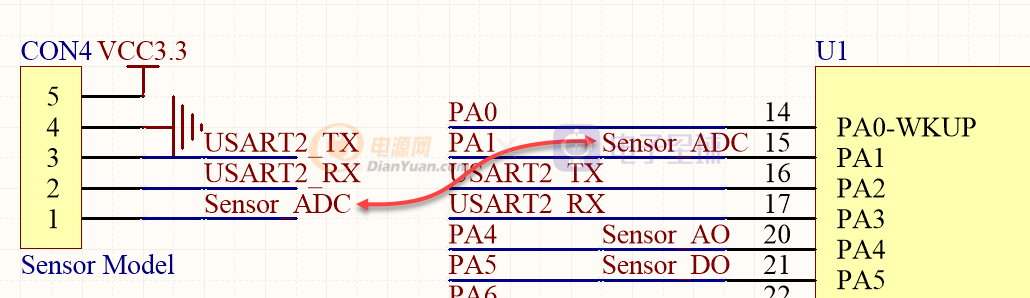
原理图
传感器模块上的麦克风可将音频信号转换为电信号(模拟量),然后通过STM32自带ADC功能将模拟量转换为数字量。
LM386是一款功率放大器,具有自身功耗低、更新内链增益可调整、电源电压范围大、外接元件少和总谐波失真小等优点的功率放大器,广泛应用于录音机和收音机之中。
麦克风将声音信号转换为电信号,然后将信号发送到LM386的引脚3,并通过外部电路将它们输出到引脚5(模块的引脚OUT)。然后使用STM32中具有ADC功能的引脚,读取模拟值。

硬件连接

注意:模块介绍里要求VCC为5V供电,不过我测试使用3.3V供电也是可以的。
STM32进行AD转换步骤
引用adc功能
要使用ADC功能,必需引用stm32f10x_adc.c 文件和 stm32f10x_adc.h 文件。
ADC功能初始化
开启对应GPIO口和ADC功能时钟,设置使用的GPIO为模拟输入。
我们这里选用核心板上预留的PA1。
查询STM32F103的数据手册如下:
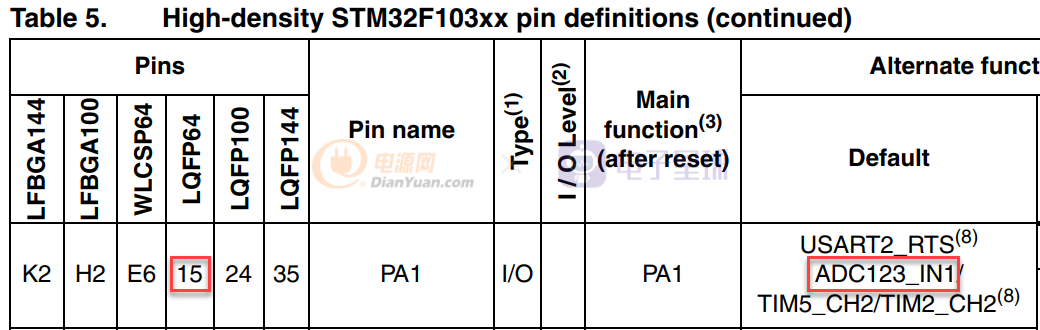
我们知道PA1引脚有ADC123_IN1标识,ADC123_IN1代表ADC1的通道1、ADC2的通道1、ADC3的通道1都在同一个管脚PA1上。

我们这里选择ADC1(选择ADC2和ADC3亦可)。
void Adc_Init(void)
{
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |RCC_APB2Periph_ADC1 , ENABLE ); //使能ADC1通道时钟
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //设置ADC分频因子6 72M/6=12,ADC最大时间不能超过14M
//PA1引脚初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //注意此处,模拟输入引脚
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_DeInit(ADC1); //复位ADC1,将外设 ADC1 的全部寄存器重设为缺省值
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC工作模式:ADC1和ADC2工作在独立模式
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //模数转换工作在单通道模式,不使用扫描
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //模数转换工作在单次转换模式
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //转换由软件而不是外部触发启动
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC数据右对齐
ADC_InitStructure.ADC_NbrOfChannel = 1; //顺序进行规则转换的ADC通道的数目
ADC_Init(ADC1, &ADC_InitStructure); //根据ADC_InitStruct中指定的参数初始化外设ADCx的寄存器
ADC_Cmd(ADC1, ENABLE); //使能指定的ADC1
ADC_ResetCalibration(ADC1); //使能复位校准
while(ADC_GetResetCalibrationStatus(ADC1)); //等待复位校准结束
ADC_StartCalibration(ADC1); //开启AD校准
while(ADC_GetCalibrationStatus(ADC1)); //等待校准结束
}获取声音传感器的输出值
声音传感器的输出值——电压值,该电压值的大小,间接等价于声音的大小。
上面已经完成了PA1引脚的初始化,要想求得该引脚的输入电压,我们封装一个获取ADC值的函数u16 Get_Adc(u8 ch)。
u16 Get_Adc(u8 ch)
{
//设置指定ADC的规则组通道,一个序列,采样时间
ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_239Cycles5 ); //ADC1,ADC通道,采样时间为239.5周期
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的软件转换启动功能
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ));//等待转换结束
return ADC_GetConversionValue(ADC1); //返回最近一次ADC1规则组的转换结果
} 要想求得PA1引脚的ADC值,只需要这样调用即可:Get_Adc(1) ; ,函数的返回值即获得的电压值。
有时为了减小随机误差,我们可以对求得的ADC结果进行多次测量取平均值。
ADC结果验证
可以将PA1引脚通过杜邦线接触核心板上的3.3V和GND,看看结果是否为4095和0附近的值。
或者直接连接声音传感器模块,改变周围环境的声音大小,看看输出值是否随着声音的大小变化而变化,如果变化规律一致,说明ADC求得值应该问题不大。
通讯协议
经过上面几步,声音传感器的值我们得到了,那么怎么将这个值上传至上位机呢?
要想传输数据,我们首先要选择与上位机的通讯方式,常见的通讯方式有RS232、RS485、USB、网络等方式。
这里我们选用串口实现下位机与上位机的通信,串口通信最简单,耗费资源也最少。
有了通信方式,为了保证通信双方可以正常交互,接来下我们要规定一下通讯协议。
一般主机端获取传感器值,一般都是一问一答情况,工业控制领域最常使用的通讯协议就是Modbus协议。
因为我们要读取的电压值为只读,所以我们这里选用功能码0x04即可。
04:INPUT REGISTER:输入寄存器,读WORD类型,字操作,输入参数,控制器运行时从外部设备获得的参数,可读但是不可写,常用于模拟量输入。
按照Modbus对寄存器的分类,电流、电压值属于模拟量,只能读不能写,属于输入寄存器类别,这里严格讲只能用0x04功能码。
Modbus协议的格式
主机发送的指令:

从机返回:

我们使用STM32F103自带的ADC功能,因为他的AD是12位的,所以我们用一个16位整数表示该电压值即可,所以我们从机返回的寄存器数据占用2个字节。
上位机发送的指令:
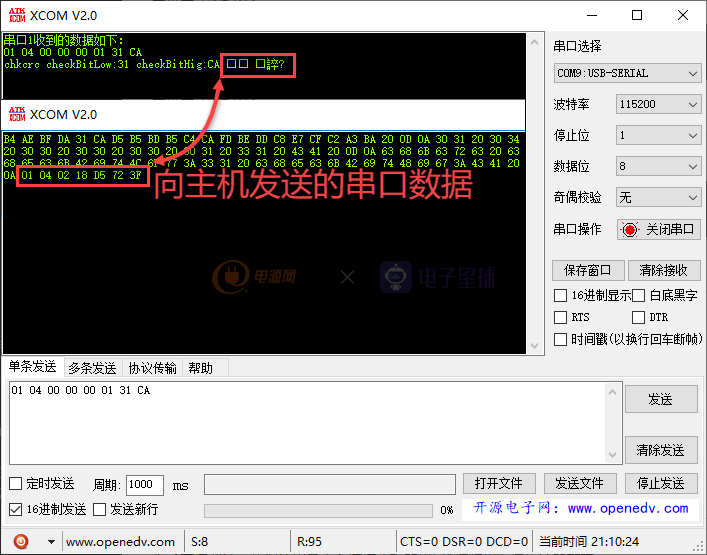
读取当前电压:nAddr, 0x04, 0x00, 0x00, 0x00, 0x01, checkBitHig, checkBitLow
即: 01 04 00 00 00 01 31 CA
串口接收及发送
为了方便调试,我们使用最小系统核心板的串口1接收和发送传感器数据。
从机接收指令
Modbus协议一般用于一主多从结构,主机主动发送指令,从机被动接收指令。
从机接收到指令后,对接收到的指令进行解析,然后根据指令向主机返回对应的内容。
当串口接收超时时,我们将获得一帧数据,这个数据保存至USART_RX_BUF数组中,接下来我们就对这个数组中的内容进行解析:
//解析接收到的串口数据
//串口1收到的信息
if(USART_RX_STA&0x8000)
{
uart1Len=USART_RX_STA&0x3f; //得到此次接收到的数据长度
if(uart1Len==8)
{
crc16 = chkcrc(USART_RX_BUF, 6);
checkBitLow = (u8)(crc16 & 0xff); //校验位低8位
checkBitHig = (u8)((crc16 >> 8) & 0xff); //校验位高8位
//低字节在前
if(checkBitLow==USART_RX_BUF[6] && checkBitHig==USART_RX_BUF[7])
{
if(USART_RX_BUF[0] == 0x01) //我们可以规定地址0x01即为获取声音传感器的值
{
//... ...
}
}
}
USART_RX_STA=0;
memset(USART_RX_BUF, 0, sizeof(USART_RX_BUF)); //清空数组
} 从机发送数据
根据主机的指令,从机返回对应的数据给主机。
从机发送的数据要满足Modbus协议返回数据的帧格式。
具体发送数据的代码如下:
u16 crc16;
u8 checkBitLow, checkBitHig;
u8 sendBuf[20];
u16 nADCValue = 0;
//获取AD的值
nADCValue = Get_Adc_Average(1,10);
//格式化待发送数据
sendBuf[0] = 0x01;
sendBuf[1] = 0x04;
sendBuf[2] = 0x02;
sendBuf[3] = ((nADCValue >> 8) & 0xff); //0x18;//
sendBuf[4] = (nADCValue & 0xff); //0xD5;//
crc16 = chkcrc(sendBuf, 5);
checkBitLow = (u8)(crc16 & 0xff); //校验位低8位
checkBitHig = (u8)((crc16 >> 8) & 0xff); //校验位高8位
sendBuf[5] = checkBitLow;
sendBuf[6] = checkBitHig;
//串口发送,发送结果数据至主机
USART_OUT(sendBuf, 7);上位机打开串口助手,以十六进制的方式发送数据帧:01 04 00 00 00 01 31 CA 。
STM32端收到串口指令之后,解析此数据帧,将当前的声音传感器的值封装数据帧之后,发送给上位机。
调试验证
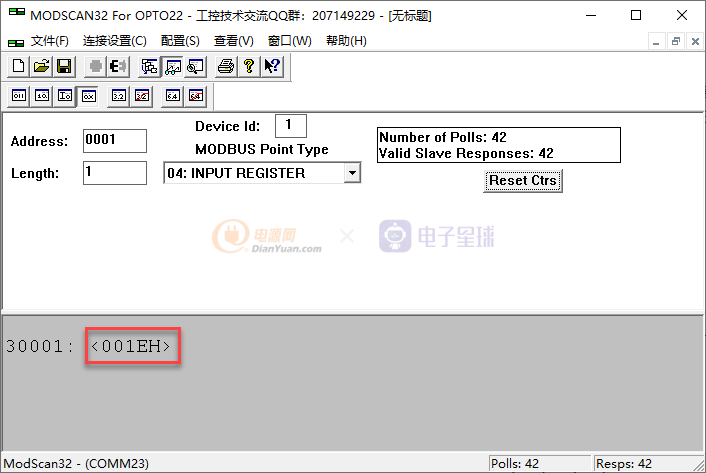
使用ModScan32软件对我们实现的下位机程序进行验证。
ModScan32是一个运行在Windows下,作为在RTU或者ASCII传输模式下的Modbus协议主设备的应用程序。
总结
这样我们就把声音传感器的数值通过串口上传到了上位机中,实现了Modbus协议的主机、从机的交互,对于不同传感器、不同节点,我们只需要设定不同的地址即可。