

[导读] 大家好,我是逸珺。
今天来分享一下,之前项目中使用FreeRTOS搭建的Event-Driven事件驱动框架。
什么是Event-Driven?Event-DrivenEvent在计算机编程方法中,是一种广为使用的编程范式。比如Windows中的鼠标、键盘输入,就被Windows操作系统管理成了外部输入事件,由操作系统向不同的应用分发这些输入事件,再由用户应用程序完成相应的动作Action。在GUI编程中,这是一种主要的编程范式。
其基本结构可以用下面这张图来描述:
事件生产者:对系统产生各种事件,并发送事件给系统
事件分发:将外部输入的事件进行分发管理
事件队列:事件分发后,对应的的事件处理者,有可能有多个事件,因此需要按先后次序依次排队处理,所以就有事件队列管理
事件消费者:负责处理由事件生产者发送给它的对应事件,产生响应。事件消费者一般有一个循环程序,一直侦听事件队列,如果接收到事件,则调用相应的处理函数。
为什么推崇事件驱动?常规的做法是程序按照固有的顺序执行,这样的编程方式,灵活性比较差。一旦需求稍有变动,可能就需要比较大的修改。在现代编程方法论中,软件的复杂度越来越大,传统过程方法不能满足复杂软件的需求,可维护性很差。用户与软件的交互体验也很差。
要回答为什么要推崇事件驱动范式,先来看看其特点:
多播通信:事件生产者产生的事件可以将事件发送给多个消费者,也就是事件接收端,因此具备很强的灵活性
实时传输:事件可以被事件分发者实时的传输给事件接收端。这在嵌入式应用中尤为明显
异步通信:事件发布端不需要等待事件处理端处理前一个事件,发的管发,处理的管处理,这也是一种解耦设计的体现。
细粒度通信:事件生产者,可以持续发送细粒度事件,而不需要将一系列事件与其业务逻辑关联,不需要聚合处理。
通过上面简要的总结其特征,再来看看为什么这个范式比较好:
敏捷性:敏捷性是指应对系统外部需求的快速变化的响应能力。在事件驱动编程范式中,功能域是松散耦合的。这可确保发生在一个组件上的更改不会影响系统中的其他组件。因此,事件驱动编程范式提供的敏捷程度很高。
易于部署:在事件驱动编程范式中,组件是松散耦合的。这在嵌入式Linux多应用程序组成的系统比较常见,在单片机中体现不出来。
可测试性:事件驱动编程范式中单元测试难度适中,因为它需要特殊的测试客户端和测试工具来生成测试所需的事件。需要考虑其他因素,例如跨功能域的交互顺序。事件的组合和交互的顺序在系统行为中起着关键作用,需要成为测试的关键考虑因素。
性能:事件驱动编程范式能够并行执行异步操作。这带来更好性能,而不管消息排队和出队所涉及的时间延迟如何。
可扩展性:由于组件的高度解耦特性,事件驱动编程范式提供了高度的可扩展性。
易于开发:由于该模式的异步性质,使用该模式的开发难度较低。
用FreeRTOS搭事件驱动框架FreeRTOS的Queue提供了任务到任务、任务到中断、中断到任务、中断到任务间的通讯机制。关于FreeRTOS队列本身应如何使用的细节,这里不作展开。
假定Task0需要处理这样一些事件,可以定义如下枚举:
typedef enum {
TASK0_EVENT_0,
TASK0_EVENT_1,
TASK0_EVENT_2
.....
} Task0EventType;
typedef struct Task0Event_t {
Task0EventType type;
union {
float para1;
int para2;
bool on;
struct {
xxx;
}xxx;
} params;
} Task0Event;定义一个联合params放在Task0Event内,可以使事件发送附加信息的能力,使用union则可以考虑到不同的事件发送方需要传送的附加信息不一样的需求,比如有的中断需要发送开关量信息,有的甚至可能是一条报文或者很多信息。
将Task0的任务循环写成下面这样的形式:
xQueueHandle task0_queue;
//假定每10毫秒循环一次
#define TASK0_INTERVAL_MS 10
void task0_main(void)
{
Task0Event event;
if(xQueueReceive(task0_queue,&event,(TASK0_INTERVAL_MS/portTICK_RATE_MS))==pdTRUE)
{
prv_event_process(&event);
}
/*其他处理*/
.....
}
static void prv_event_process( Task0Event* event)
{
switch( event->type )
{
case TASK0_EVENT_0:
.....
break;
case TASK0_EVENT_1:
.....
break;
case TASK0_EVENT_2:
.....
break;
default:
.....
break;
}
}这样就写好了事件处理端了,只需要分析出与该任务有哪些外设或其他任务会对该任务发送事件,就可以很好的写出事件发送相关的代码了。
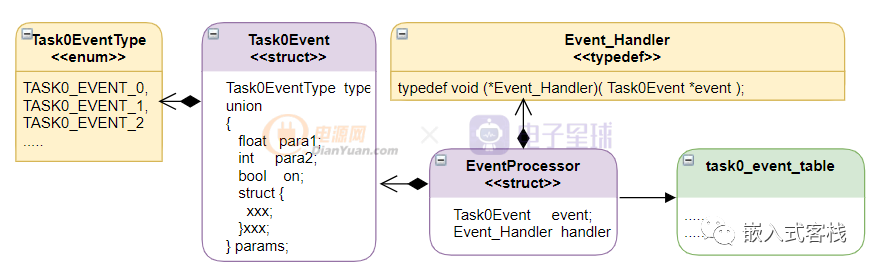
对于事件处理的函数,如果不用switch-case语句,定义一个这样的事件回调函数表也是可以的,一定要讨论哪种好,哪种不好,我觉得意义不是很大,看个人喜欢吧:
//函数指针这里举个简单的例子,实际使用的时候,可能需要加参数,返回值等
typedef void (*Event_Handler)( Task0Event *event );
typedef struct EventProcessor_t
{
Task0Event event;
Event_Handler handler;
} EventProcessor;
EventProcessor task0_event_table[] = {
{TASK0_EVENT_0,event0_handler},
{TASK0_EVENT_1,event1_handler},
{TASK0_EVENT_2,event2_handler},
......
}
void task0_main(void)
{
Task0Event event;
if (xQueueReceive(task0_queue,&event, (TASK0_INTERVAL_MS/portTICK_RATE_MS)) == pdTRUE)
{
task0_event_table[event.type].handler();
}
/*其他处理*/
.....
}用一张图来描述这个思路,就是这样的:
中断中发送
比如是一个中断需要对该任务发送事件0,就可以在该中断函数内如下发送事件:
void xxx_ISR(void)
{
....
Task0Event event;
event.type = TASK0_EVENT_0;
portBASE_TYPE woken = pdFALSE;
xQueueSendFromISR(task0_queue, &event, &woken);
}对参数pxHigherPriorityTaskWoken,做个简要说明:
单个队列可能会阻塞一个或多个任务,就是该事件可以被多个任务处理。调用这三个函数:
xQueueSendFromISR()
xQueueSendToFrontFromISR()
xQueueSendToBackFromISR()
这三个函数使等待该事件的任务离开阻塞态。如果调用API函数导致任务离开阻塞状态,并且未阻塞任务的优先级等于或高于当前正在执行的任务(被中断的任务),那么在API内部函数会将 *pxHigherPriorityTaskWoken设置为真。如果这些函数将此值设置为 pdTRUE,则应在退出中断之前执行上下文切换。这将确保中断直接返回到最高优先级的就绪状态任务。
BaseType_t xQueueSendFromISR( QueueHandle_t xQueue,
const void *pvItemToQueue,
BaseType_t *pxHigherPriorityTaskWoken );
BaseType_t xQueueSendToBackFromISR( QueueHandle_t xQueue,
const void *pvItemToQueue,
BaseType_t *pxHigherPriorityTaskWoken );
BaseType_t xQueueSendToFrontFromISR( QueueHandle_t xQueue,
const void *pvItemToQueue,
BaseType_t *pxHigherPriorityTaskWoken ); 这三个函数的作用基本类似,都是在中断中可以使用的发送事件到队列的API:
xQueueSendFromISR或xQueueSendToBackFromISR
将发送事件至队尾;
xQueueSendToFrontFromISR发送至对首。
void xxx_f(void)
{
....
Task0Event event;
event.type = TASK0_EVENT_1;
xQueueSend(task0_queue, &event, portMAX_DELAY);
...
}可被使用的API有这样三个:
BaseType_t xQueueSend( QueueHandle_t xQueue,
const void * pvItemToQueue,
TickType_t xTicksToWait );
BaseType_t xQueueSendToFront( QueueHandle_t xQueue,
const void * pvItemToQueue,
TickType_t xTicksToWait );
BaseType_t xQueueSendToBack( QueueHandle_t xQueue,
const void * pvItemToQueue,
TickType_t xTicksToWait ); 这三个函数的作用类似,区别与前面中断版本类似,就不赘述了。
总结一下:利用FreeRTOS搭建这样一个事件驱动应用框架,可以很容易开发,后期维护也很方便。需要加个功能或修改功能,很容易扩展,这样一种编程范式在其他的RTOS中也可以使用,只不过不同的RTOS提供的API会有差异,方法是相通的。