

目前我了解的2类IC设计模式:PI-集成MOS的开关方式;ON/O2等控制器+MOS分离的PWM工作模式进行分析!
基本的反激变换器原理图如下所示,在需要对输入输出进行电气隔离的低功率<75W~的开关电源应用场合,反激变换器(Flyback Converter)是最常用的一种拓扑结构(Topology)。简单、可靠、低成本、易于实现是反激变换器突出的优点;接下来我将电源的关键参数的设计&工作模式进行说明!
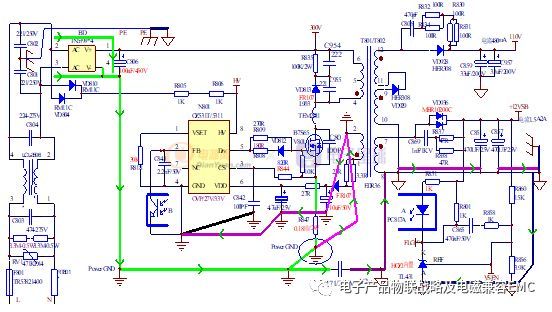
我们先来确定系统的输入输出参数,进行开关电源关键参数的分析设计;关键参数我们来分析FLY 的反射电压VOR 与 工作模式KP或 KRF/KRP的设计!
举例说明:先进行关键参数分析
上面原理图设计要求:90VAC-265VAC的全电压范围;
对应的公式计算应用 100VRMS–Min 来计算输入电解电容的纹波电流
输出规格:
12V-2A /2.5A & 110V-0.42A/0.5A;
1.对高效率要求的VOR 设计参考(我的设计经验)
对于85VAC-265VAC(通用)输入电压范围,VOR推荐:80V-110V最佳范围
对于165VAC-265VAC(国内)输入电压范围,VOR推荐:100V-120V最佳范围
分析如下:

变压器性能相关参数设计分析:
使用基本计算公式;我们将计算公式进行EXCEL自动计算,从而对比参数设计!
计算参考如下:
A.VRO=80V LP=280uH时 NP=26圈
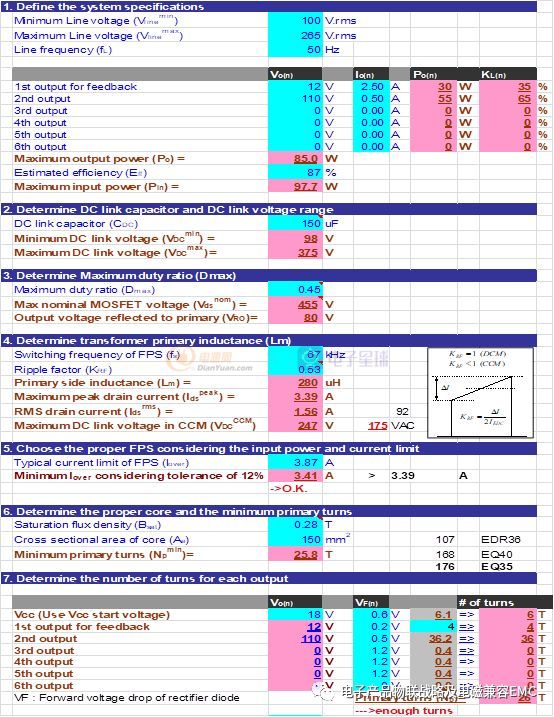
B.VRO=90V LP=280uH时 NP=30圈

对比VRO=80V与 VRO=90V 时其变压器的原边圈数有差异;VRO=80V时有最小的圈数;其漏感最小有好的交叉调整率和高的效率!(实践测试一致OK)
2.工作模式分析KP/KRP
对于关键参数FLY反激变压器,KP=KRP作为反激变压器中的灵魂参数,该如何对其进行取舍,值得我们深入探讨!
工作模式:即电感电流工作状态,一般分DCM、CCM、BCM三种(定性分析)。
KP/KRP:描述变压器/电感电流工作状态的一个量(定量计算);实际意义;
只要原边电感电流处于连续状态,都称之为CCM模式。而深度CCM模式(较小纹波电流)与浅度CCM模式(较大纹波电流)相比较,电感量相差好几倍,而浅度CCM模式与BCM、DCM模式的各种性能、特点可能更为相似。显然需要一个合适的参数来描述所有电感电流的工作状态。通过设置KP/KRP值,可以把变压器的电感电流状态与磁性材料、环路特性等紧密联系起来。我们也可以更加合理的评估产品设计方案!!
A.对于集成MOS的PI系统对KP的定义
连续模式CCM:如果在次级电流下降到零之前MOSFET开通,则电源工作在连续工作模式。
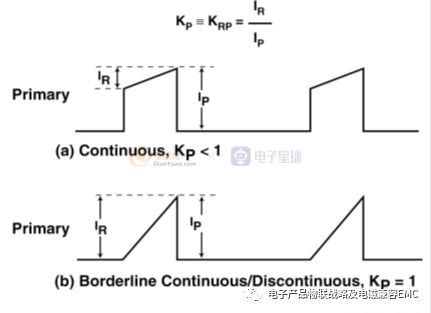
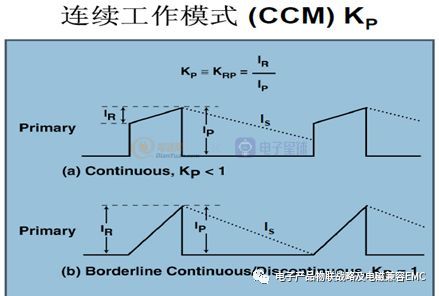
非连续工作模式(DCM):在非连续工作模式下,当MOSFET开通时,次级电流为零。

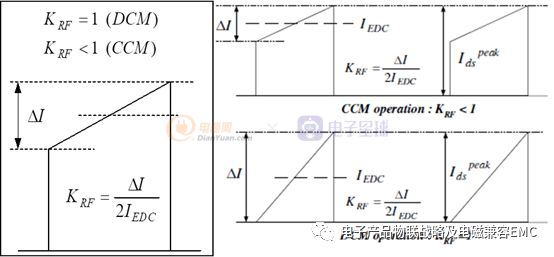
B.对于分离的PWM控制的ON/O2系统对KRP=KRF的定义
C.KP=KRP=KRF的工作模式分析
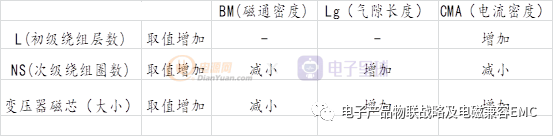
KRP较大时(特别是DCM模式),磁芯损耗一般较大(NP较小),气隙较小(无气隙要求,仅满足LP值),LP较小,漏感会较大,纹波电流较大(电流有效值较高);
KRP较小时(特别是深度CCM模式),磁芯损耗一般较小(NP较大),气隙较大(有气隙要求,平衡直流磁通),LP较大,漏感会较小,纹波电流较小(电流有效值较低);
注:KRP较小时,气隙也是可以做到较小,但这需要更大的磁芯和技巧;
KRP较大时,磁芯损耗也是可以做的较小,但这同样需要更大的磁芯和技巧;注意:相同磁芯、开关频率,DMAX,DCM模式比CCM模式下的输出功率更大;其实这是不完全对的(至少不符合实际,因为需要限制DMAX,导致空载容易异常),原因在于DCM模式下磁芯损耗会超出你的想象(电应力也会如此);DCM模式下,如果想大幅度降低磁芯损耗,唯一的方法是增大NP,而过大的NP会与LP形成现实冲突(DCM模式下,LP一般较小),造成磁芯气隙超出你的想象(漏感也会如此);有没有方法解决这种现实矛盾?答案应该是肯定的,即选择合适的磁芯结构,如长宽比小且AE大的磁芯(PQ系列),或许会比长宽比大且AE小的磁芯(EER、EEL系列)更加有优势。
(在DCM模式下,如果限制DMAX,则会比CCM模式下输出更大的功率)
KRP较大时,增大DMAX可以在一定程度上降低原边的纹波电流及有效电流值,但是次级的电流应力会更加恶劣,这种方法(增大/减小DMAX)只适合平衡初次级的电压、电流应力,应该不是一种很好的设计手段。
KRP较大时,空载启动困难,特别是低压大电流输出,且空载无跳频(宽范围AC输入时尤其如此,如3.3V10A,特别是超低压输出);
KRP较小时,开关损耗较大,特别是高压小电流输出,且开关频率较高(窄范围AC输入时尤其如此,如100V0.5A,特别是高压输出);
注:非低压大电流产品(如12V5A),KRP较大时,DMAX不能设计的过小,否则空载也会启动困难,且空载无跳频(宽范围AC输入时尤其如此);
KRP较大时,动态响应较快,环路补偿比较容易(特别是采用电流模式控制);
KRP较小时,动态响应较慢,环路补偿相对困难(特别是采用电压模式控制);
KRP较大时,电感电流斜率较急,CS采样端对噪声影响不明显;
KRP较小时,电感电流斜率较缓,CS采样端可能会受到噪声影响;
注:电流模式芯片通常会比电压模式控制芯片的性能更加优异,但并非所有情况下都是如此。如果输入电压较高,输出功率较小,电流模式芯片可能无法检测CS电压,低压大电流输出产品在空载时也会出现这种情况(对宽范围AC输入,低压大电流输出〈甚至非大电流输出产品〉,如果KRP较大,DMAX又较小,空载极有可能出问题,或许轻载降频、提高VCC都不一定有效,但是采用某些电压模式控制芯片,可能会避免此问题)。低压输入,输出功率很大时,电感电流斜率较缓,CS采样电压(电阻/互感器)可能很容易受到干扰,如果负载变化较大,也可能会导致CS端采样异常。也不是所有电流模式芯片均比电压模式芯片要好,这需要综合考虑各种因素,包括外围电路的复杂程度。
超高压输入时,KRP应该设置较大(最好是QR模式),开关损耗会较低;
超低压输入时,KRP应该设置较小(最好是深度CCM模式),漏感会较低;
推荐KP=KRP选取法则

对于FLY的关键参数的设计就是先设计好电气参数,如初次级的电压、电流应力,评估各种损耗温升,考虑到PWM芯片、MOS、二极管各种的特点(先确定好),让FLY-反激变换器工作在最佳的工作状态。根据这个最佳的电气参数,我们来设计变压器参数,如NP、NS、气隙等等,最后通过更换磁芯或是微调变压器的参数结构设计,让整个变换器都工作在最合理的状态。参考上面的VRO=80V和VRO=90V的EXCEL的计算表格参数;
对于FLY的设计可以直接引用一些PI的资料,特别是设计流程、软件操作、芯片资料、包括部分设计思路等等都非常的简单易学!单并不代表PI的设计理念比其他公司更优秀,多年的PI产品的设计应用是我更熟悉些和了解,而且这些资料都有中文版本,内容详实,方便初学者追根溯源。
PI的变压器设计软件其实是非常不错的入门工具,熟练了也可以把它用来设计其它类型的芯片。现在又可以用来设计PFC、正激、LLC等拓扑,已经非常强大了,建议初学者可以多花点时间学习!细节后续再进行补充!