

QP本身可以看做是一个软件的框架(其实和操作系统有点像,但是又有一点不一样),在移植之前,先看一下这个QP他主要位于我们项目开发的哪一个层上,假如我们采用分层的思想来组织我们的项目,如下:
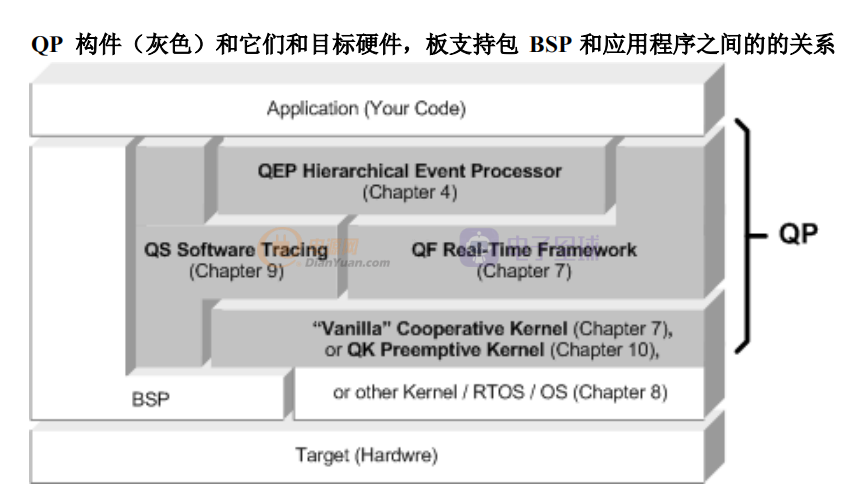
从图中可以看到QP在项目开发中所处于的层的位置,他更接近于我们的应用,在他的下面有BSP,RTOS 还有hardware(硬件)。那么站在移植的角度上来看的话,QP移植有关的内容有,CPU(架构),编译器和操作系统(可能没有)。
QP为了实现跨平台移植及通用性,所以在设计之初就考虑到了后面的移植的问题,也就是对外有了一个叫做PAL的层,也就是我的port接口文件。
PAL层有两个目的: 简化QP使用 和 简化移植 qf_port.h(新版本变更为qpc.h)(PAL层接口文件),
简化QP使用:根据qf_port.h(新版本变更为qpc.h)文件在应用中调用QP.lib提供的服务。
简化移植:根据qf_port.h文件裁剪QP源代码,生成特定的qp.lib库文件。

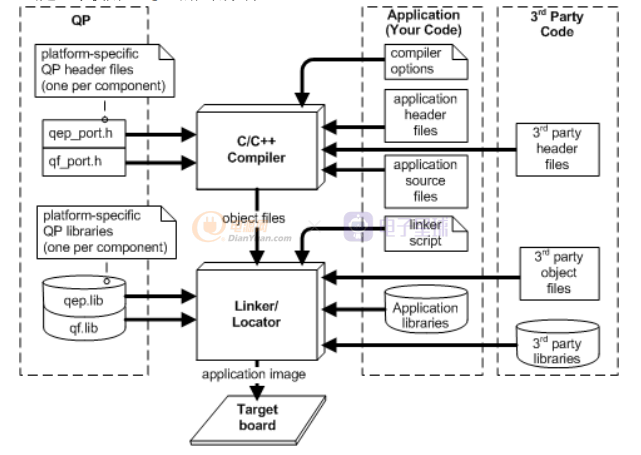
如何能够生成qp.lib库文件,假如我们讲自己编写的某个软件以组件的形式提供给他人应用,如果组织自己的代码,这里QP给了我们很好的一些建议。
所有 QP 构件被设计为使用一个细粒度的目标库来部署。 QP 库允许连接器在链接时消除任 何没有被引用的 QP 代码,这为广泛的应用程序导致了对每个 QP 构件的自动处理。这个方法消除了为每个应用程序进行手工配置和充新编译 QP 源代码的需求。具体如何实现的,可以查看其源码的组织方式。
接下来我们以QPC691版本进行分析,main.c文件中包含qpc.h:
#ifndef QPC_H
#define QPC_H
/**
* @description
* This header file must be included directly or indirectly
* in all application modules (*.c files) that use QP/C.
*/
#ifdef __cplusplus
extern "C" {
#endif
/****************************************************************************/
#include "qf_port.h" /* QF/C port from the port directory */
#include "qassert.h" /* QP embedded systems-friendly assertions */
#ifdef Q_SPY /* software tracing enabled? */
#include "qs_port.h" /* QS/C port from the port directory */
#else
#include "qs_dummy.h" /* QS/C dummy (inactive) interface */
#endif由qpc.h包含qf_port.h文件:
#ifndef QF_PORT_H
#define QF_PORT_H
/* The maximum number of system clock tick rates */
#define QF_MAX_TICK_RATE 2U
/* QF interrupt disable/enable and log2()... */
#if (__ARM_ARCH == 6) /* Cortex-M0/M0+/M1(v6-M, v6S-M)? */
/* The maximum number of active objects in the application, see NOTE1 */
#define QF_MAX_ACTIVE 8U
/* Cortex-M0/M0+/M1(v6-M, v6S-M) interrupt disabling policy, see NOTE2 */
#define QF_INT_DISABLE() __asm volatile ("cpsid i")
#define QF_INT_ENABLE() __asm volatile ("cpsie i")
/* QF critical section entry/exit (unconditional interrupt disabling) */
/*#define QF_CRIT_STAT_TYPE not defined */
#define QF_CRIT_ENTRY(dummy) QF_INT_DISABLE()
#define QF_CRIT_EXIT(dummy) QF_INT_ENABLE()
/* CMSIS threshold for "QF-aware" interrupts, see NOTE2 and NOTE4 */
#define QF_AWARE_ISR_CMSIS_PRI 0
/* hand-optimized LOG2 in assembly for Cortex-M0/M0+/M1(v6-M, v6S-M) */
#define QF_LOG2(n_) QF_qlog2((uint32_t)(n_))
#else /* Cortex-M3/M4/M7 */
/* The maximum number of active objects in the application, see NOTE1 */
#define QF_MAX_ACTIVE 16U
/* Cortex-M3/M4/M7 alternative interrupt disabling with PRIMASK */
#define QF_PRIMASK_DISABLE() __asm volatile ("cpsid i")
#define QF_PRIMASK_ENABLE() __asm volatile ("cpsie i")
/* Cortex-M3/M4/M7 interrupt disabling policy, see NOTE3 and NOTE4 */
#define QF_INT_DISABLE() __asm volatile (\
"cpsid i\n" "msr BASEPRI,%0\n" "cpsie i" :: "r" (QF_BASEPRI) : )
#define QF_INT_ENABLE() __asm volatile (\
"msr BASEPRI,%0" :: "r" (0) : )
/* QF critical section entry/exit (unconditional interrupt disabling) */
/*#define QF_CRIT_STAT_TYPE not defined */
#define QF_CRIT_ENTRY(dummy) QF_INT_DISABLE()
#define QF_CRIT_EXIT(dummy) QF_INT_ENABLE()
/* BASEPRI threshold for "QF-aware" interrupts, see NOTE3 */
#define QF_BASEPRI 0x3F
/* CMSIS threshold for "QF-aware" interrupts, see NOTE5 */
#define QF_AWARE_ISR_CMSIS_PRI (QF_BASEPRI >> (8 - __NVIC_PRIO_BITS))
/* Cortex-M3/M4/M7 provide the CLZ instruction for fast LOG2 */
#define QF_LOG2(n_) ((uint_fast8_t)(32U - __builtin_clz((unsigned)(n_))))
#endif
#define QF_CRIT_EXIT_NOP() __asm volatile ("isb")
#include "qep_port.h" /* QEP port */
#if (__ARM_ARCH == 6) /* Cortex-M0/M0+/M1(v6-M, v6S-M)? */
/* hand-optimized quick LOG2 in assembly */
uint_fast8_t QF_qlog2(uint32_t x);
#endif /* Cortex-M0/M0+/M1(v6-M, v6S-M) */
#include "qv_port.h" /* QV cooperative kernel port */
#include "qf.h" /* QF platform-independent public interface */
接下来是qs_port.h:
#ifndef QS_PORT_H
#define QS_PORT_H
/* QS time-stamp size in bytes */
#define QS_TIME_SIZE 4
/* object pointer size in bytes */
#define QS_OBJ_PTR_SIZE 4
/* function pointer size in bytes */
#define QS_FUN_PTR_SIZE 4
/*****************************************************************************
* NOTE: QS might be used with or without other QP components, in which case
* the separate definitions of the macros QF_CRIT_STAT_TYPE, QF_CRIT_ENTRY,
* and QF_CRIT_EXIT are needed. In this port QS is configured to be used with
* the other QP component, by simply including "qf_port.h" *before* "qs.h".
*/
#include "qf_port.h" /* use QS with QF */
#include "qs.h" /* QS platform-independent public interface */
#endif /* QS_PORT_H */
接下来是包含qep_port.h:
#ifndef QEP_PORT_H
#define QEP_PORT_H
/*! no-return function specifier (ARM-Clang/LLVM compiler) */
#define Q_NORETURN __attribute__ ((noreturn)) void
#include <stdint.h> /* Exact-width types. WG14/N843 C99 Standard */
#include <stdbool.h> /* Boolean type. WG14/N843 C99 Standard */
#include "qep.h" /* QEP platform-independent public interface */
#endif /* QEP_PORT_H */
接下来是qv_port.h:
#ifndef QV_PORT_H
#define QV_PORT_H
#if (__ARM_ARCH == 6) /* Cortex-M0/M0+/M1 ? */
/* macro to put the CPU to sleep inside QV_onIdle() */
#define QV_CPU_SLEEP() do { \
__asm volatile ("wfi"); \
QF_INT_ENABLE(); \
} while (false)
#else /* Cortex-M3/M4/M4F */
/* macro to put the CPU to sleep inside QV_onIdle() */
#define QV_CPU_SLEEP() do { \
QF_PRIMASK_DISABLE(); \
QF_INT_ENABLE(); \
__asm volatile ("wfi"); \
QF_PRIMASK_ENABLE(); \
} while (false)
/* initialization of the QV kernel for Cortex-M3/M4/M4F */
#define QV_INIT() QV_init()
void QV_init(void);
#endif
#include "qv.h" /* QV platform-independent public interface */
#endif /* QV_PORT_H */
接下来是qv_port.c:
#else /* NOT Cortex-M0/M0+/M1(v6-M, v6S-M)? */
#define SCnSCB_ICTR ((uint32_t volatile *)0xE000E004)
#define SCB_SYSPRI ((uint32_t volatile *)0xE000ED14)
#define NVIC_IP ((uint32_t volatile *)0xE000E400)
/*
* Initialize the exception priorities and IRQ priorities to safe values.
*
* Description:
* On Cortex-M3/M4/M7, this QV port disables interrupts by means of the
* BASEPRI register. However, this method cannot disable interrupt
* priority zero, which is the default for all interrupts out of reset.
* The following code changes the SysTick priority and all IRQ priorities
* to the safe value QF_BASEPRI, wich the QF critical section can disable.
* This avoids breaching of the QF critical sections in case the
* application programmer forgets to explicitly set priorities of all
* "kernel aware" interrupts.
*
* The interrupt priorities established in QV_init() can be later
* changed by the application-level code.
*/
void QV_init(void) {
uint32_t n;
/* set exception priorities to QF_BASEPRI...
* SCB_SYSPRI1: Usage-fault, Bus-fault, Memory-fault
*/
SCB_SYSPRI[1] |= (QF_BASEPRI << 16) | (QF_BASEPRI << 8) | QF_BASEPRI;
/* SCB_SYSPRI2: SVCall */
SCB_SYSPRI[2] |= (QF_BASEPRI << 24);
/* SCB_SYSPRI3: SysTick, PendSV, Debug */
SCB_SYSPRI[3] |= (QF_BASEPRI << 24) | (QF_BASEPRI << 16) | QF_BASEPRI;
/* set all implemented IRQ priories to QF_BASEPRI... */
n = 8U + ((*SCnSCB_ICTR & 0x7U) << 3); /* (# NVIC_PRIO registers)/4 */
do {
--n;
NVIC_IP[n] = (QF_BASEPRI << 24) | (QF_BASEPRI << 16)
| (QF_BASEPRI << 8) | QF_BASEPRI;
} while (n != 0);
}
#endif /* NOT Cortex-M0/M0+/M1(v6-M, v6S-M)? */这一部分的接口文件在我们的真实应用中是不需要自己移植的,当然如果你选用的MCU在qp的板级支持中没有找到,那就要你真的自己移植了。以上需要移植的文件总结下:
接下来使我们真正需要自己手动移植的部分,这一部分一般都是放在bsp.c文件中:
/* ISRs used in this project ===============================================*/
void SysTick_Handler(void) {
/* state of the button debouncing, see below */
static struct ButtonsDebouncing {
uint32_t depressed;
uint32_t previous;
} buttons = { 0U, 0U };
uint32_t current;
uint32_t tmp;
#ifdef Q_SPY
{
tmp = SysTick->CTRL; /* clear SysTick_CTRL_COUNTFLAG */
QS_tickTime_ += QS_tickPeriod_; /* account for the clock rollover */
}
#endif
QF_TICK_X(0U, &l_SysTick); /* process time events for tick rate 0 */
/* QF callbacks ============================================================*/
void QF_onStartup(void) {
/* set up the SysTick timer to fire at BSP_TICKS_PER_SEC rate */
SysTick_Config(SystemCoreClock / BSP_TICKS_PER_SEC);
/* assign all priority bits for preemption-prio. and none to sub-prio. */
NVIC_SetPriorityGrouping(0U);
/* !!!!!!!!!!!!!!!!!!!!!!!!!!!! CAUTION !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
* Assign a priority to EVERY ISR explicitly, see NOTE00.
* DO NOT LEAVE THE ISR PRIORITIES AT THE DEFAULT VALUE!
*/
/* kernel UNAWARE interrupts, see NOTE00 */
NVIC_SetPriority(USART2_IRQn, 0U);
/* ... */
/* kernel AWARE interrupts, see NOTE00 */
NVIC_SetPriority(SysTick_IRQn, QF_AWARE_ISR_CMSIS_PRI);
/* ... */
/* enable IRQs... */
#ifdef Q_SPY
NVIC_EnableIRQ(USART2_IRQn); /* USART2 interrupt used for QS-RX */
#endif
}
/*..........................................................................*/
void QF_onCleanup(void) {
}
/*..........................................................................*/
void QV_onIdle(void) { /* CATION: called with interrupts DISABLED, NOTE01 */
LED_GPIO_PORT->BSRRL = LED6_PIN; /* turn LED on */
__NOP(); /* wait a little to actually see the LED glow */
__NOP();
__NOP();
__NOP();
LED_GPIO_PORT->BSRRH = LED6_PIN; /* turn LED off */
#ifdef Q_SPY
QF_INT_ENABLE();
QS_rxParse(); /* parse all the received bytes */
if ((USART2->SR & USART_FLAG_TXE) != 0) { /* TXE empty? */
uint16_t b;
QF_INT_DISABLE();
b = QS_getByte();
QF_INT_ENABLE();
if (b != QS_EOD) { /* not End-Of-Data? */
USART2->DR = (b & 0xFFU); /* put into the DR register */
}
}
#elif defined NDEBUG
/* Put the CPU and peripherals to the low-power mode.
* you might need to customize the clock management for your application,
* see the datasheet for your particular Cortex-M MCU.
*/
/* !!!CAUTION!!!
* The WFI instruction stops the CPU clock, which unfortunately disables
* the JTAG port, so the ST-Link debugger can no longer connect to the
* board. For that reason, the call to __WFI() has to be used with CAUTION.
*
* NOTE: If you find your board "frozen" like this, strap BOOT0 to VDD and
* reset the board, then connect with ST-Link Utilities and erase the part.
* The trick with BOOT(0) is that it gets the part to run the System Loader
* instead of your broken code. When done disconnect BOOT0, and start over.
*/
//QV_CPU_SLEEP(); /* atomically go to sleep and enable interrupts */
QF_INT_ENABLE(); /* just enable interrupts */
#else
QF_INT_ENABLE(); /* just enable interrupts */
#endif
}
/*..........................................................................*/
Q_NORETURN Q_onAssert(char_t const * const module, int_t const loc) {
/*
* NOTE: add here your application-specific error handling
*/
(void)module;
(void)loc;
QS_ASSERTION(module, loc, 10000U); /* report assertion to QS */
NVIC_SystemReset();
}
/*以下为QS部分*/
uint8_t QS_onStartup(void const *arg) {
void QS_onCleanup(void) {
}
QSTimeCtr QS_onGetTime(void) { /* NOTE: invoked with interrupts DISABLED */
void QS_onFlush(void) {
/*..........................................................................*/
/*! callback function to reset the target (to be implemented in the BSP) */
void QS_onReset(void) {
void QS_onCommand(uint8_t cmdId,
uint32_t param1, uint32_t param2, uint32_t param3)
掌握bsp这一部分是关键,其实学习完qp移植,掌握bsp.c的必要配置也就足够了,但是QP带给我的并不止于此,真正有意思的课题是,离开了IDE的支持,你如何使用编译器来构建整个代码?