

前言:
我的目的是想学习和了解微电网中逆变器的并联控制方法,经过一段时间的查阅文献,我了解到目前并联控制的实现在文献中出现频次较高的方法是:一种是下垂控制和输出增加虚拟阻抗的方法,使得输出阻抗呈感性来优化并联性能,另外一种是虚拟同步发电机VSG的方法,引入VSG的惯性环节来优化并联性能。
因此我需要首先建立下垂控制的仿真模型来对其进行测试,在之前已经分别完成了闭环逆变器控制《一种基于dq双闭环控制的离网逆变器的仿真实现》,下垂控制《基于下垂控制的逆变器并联的原理,实现和仿真 P1》,本次就把它们综合起来进行逆变器的并联分析。在后续的推文中还会陆续更新:逆变器的并离网控制,非线性负载和谐波电流抑制策略。
需要提前说明的,我之前对逆变器研究不多,这里是一边学习一边更新,如果有错误还请各位大佬帮忙指点,谢谢。之前提到了微电网的孤岛运行时,需要满足多台逆变器并联运行,在基本的控制策略都是三环控制方法如功率,电压,电流。
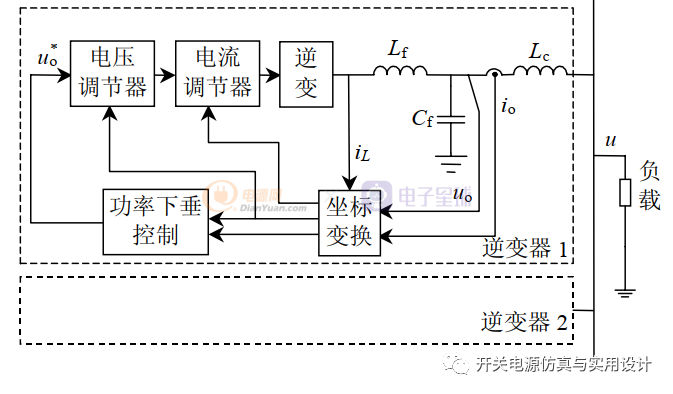
下垂控制的实现需要微网中逆变器的输出线路呈现电感性,这样有助于系统稳定。但微电网内的电压输电线基本都是阻性(长度较短)所以单纯用下垂控制不易稳定,诸多文献1通过引起输出虚拟阻抗的方式,来让逆变器输出呈现感性,这样来提升下垂控制的稳定性。也既是输出电压Vo - Zv(s) = Vo - Io*2*pi*Lv,电压环error = Vref* - Vo - Zv(s)*Io这样实现。
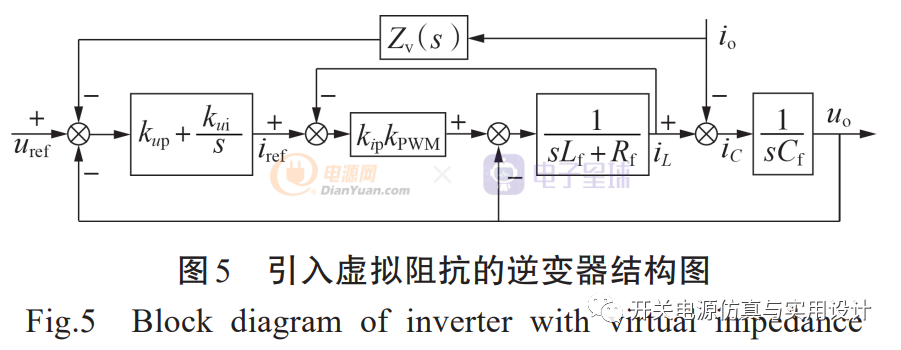
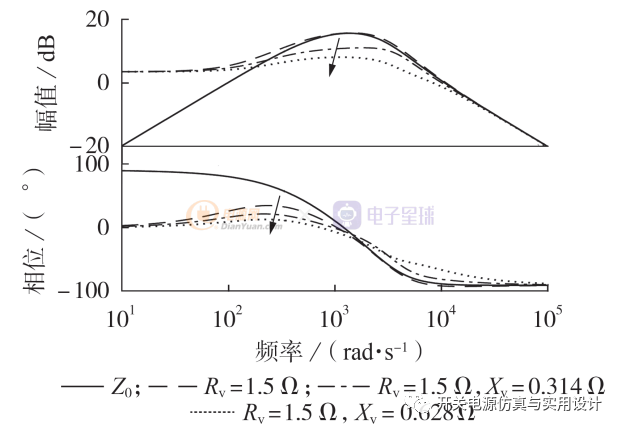
增加虚拟电阻后同时能把输出阻抗在低频呈现感性:
仿真实现,负载24KW阻性负载和1mH电感:
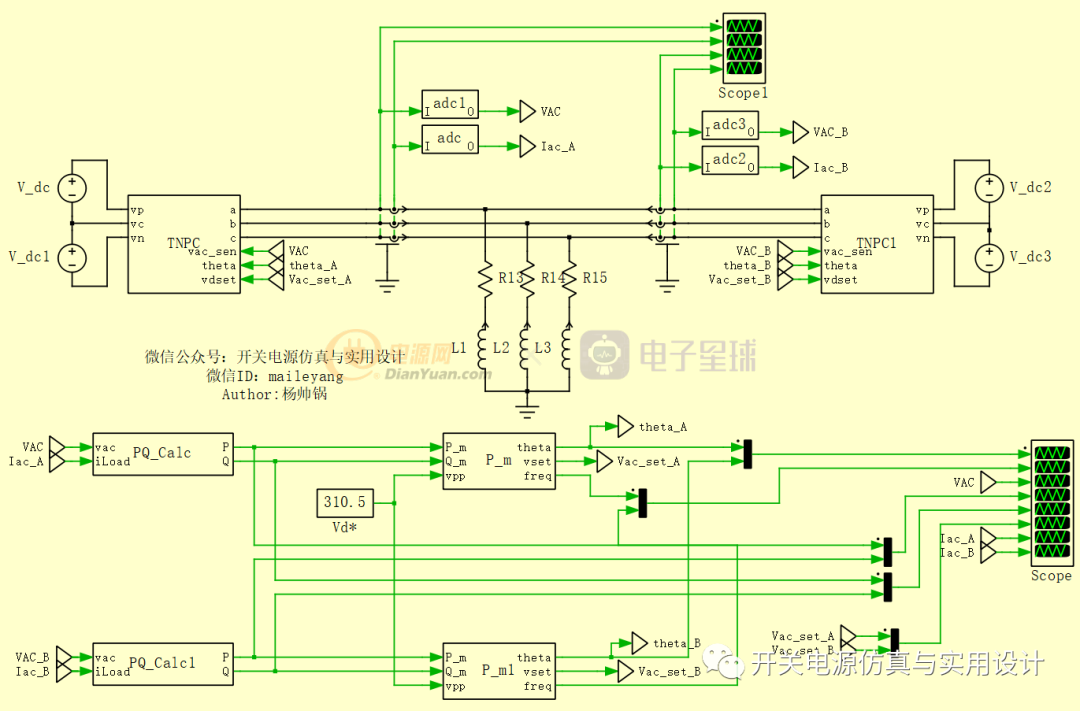
并联运行测试,基本上P和Q都实现均分:

从测试的效果来看,并联的效果还是不错的。但是现实中还会电压电流采样误差,直流偏置,控制误差等等因素影响到并联性能,也会加剧环流。但是本模型可以作为研究逆变器并联的一个起点,通过修改下垂系数或改善控制框架来研究并联性能。
参考文献:
1,基于虚拟阻抗的微电网有功均分阻性下垂控制策略耿英明,侯梅毅,朱国防,刘 洋,于 昊,呼延天亮 (山东大学 电气工程学院,山东 济南 250061) 电 力 自 动 化 设 备 Vol.40 No.10 Oct. 2020
2,微网中三相逆变器无互连线并联新型下垂控制策略 阚志忠,张纯江,薛海芬,董杰,邬伟扬 中 国 电 机 工 程 学 报 Vol.31 No.33 Nov.25, 2011