

一般数字控制器设计方法采用直接数字法:s域的被控对象首先被转化到z域,控制器设计直接在z域中进行。当然,也有另外一种数字再设计方法,控制器在s域中设计,然后再进行离散化。在数字再设计法中,当采样频率足够高时,由数字控制的采样保持过程导致的时间延迟可以做一个近似表达。在时间延迟环节被线性化以后,就可以根据系统的性能指标在s域中采用Bode图之类的标准设计方法来设计模拟控制器,一旦模拟控制器被设计出来以后,就能够被离散化。
s域到z域的离散化方法建议采用双线性变换,也就是tustin变换:
双线性变换法把s域的整个左半平面映射为z平面的单位圆,因而不会影响离散化后系统的稳定性,除此之外,双线性变化发最吸引人的特征是在低于1/10采样频率时同时保留了控制器幅值和相位的频率特性。与被控对象校正后系统开环传递函数的幅值穿越频率相比,当采样频率足够高时,可以采用数字再设计法。
现在以一个s域的补偿器设计为例,流程如下:
1)首先选择一个合适的已知原型滤波器传递函数(要选择合适的零极点);
以3p3z补偿器为例,其常见表达式为:
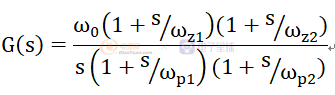
上述补偿器提供一个零极点,以提高低频增益;提供两个零点wz1和wz2,提供两个极点wp1和wp2.假设提供零点频率800Hz,两个零点 分别为300Hz和900Hz,两个极点分别为500Hz和5KHz,可以如下表达:

2)将改原型滤波器的s域传递函数映射到z域中;
可以利用matlab将上述s域方程进行z域的转换,matlab变换程序如下
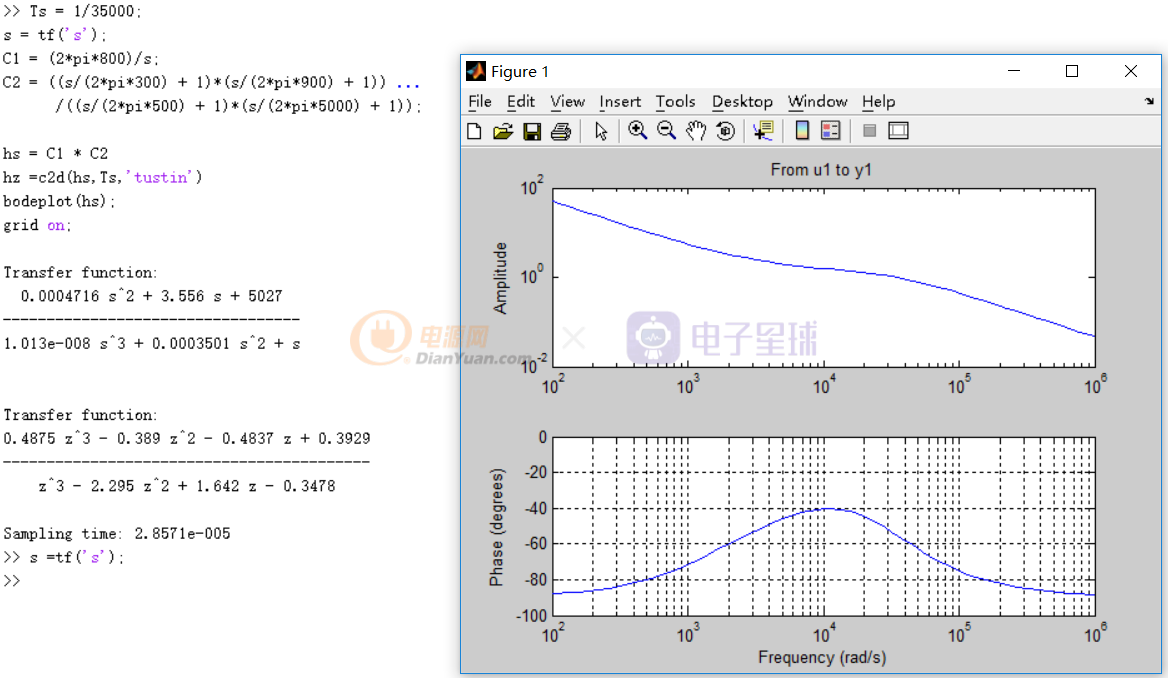
现在得到了z域的表达式为:
 e(z)是误差量,u(z)为输出量。
e(z)是误差量,u(z)为输出量。
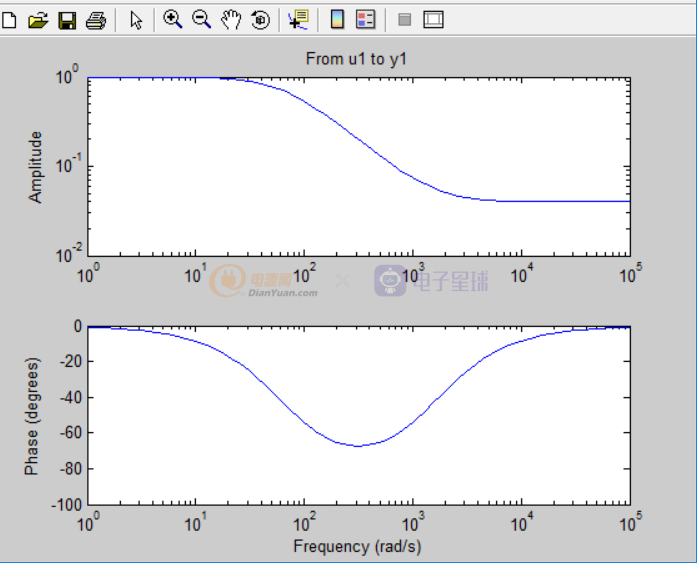
另外举例为一个SZSP的s传递函数如下(极点频率在10Hz,零点频率在250Hz):
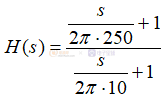
利用matlab变换如下(采样频率100kHz):

除了matlab可以进行方便快捷的变换之外,数学软件Mathcad也是可以的

3)将z域转换为时域内的线性差分方程;

由于dspic33系列是16bit定点,所以需要对A/B系数进行Q15定标然后再进行计算。
在MCU内部执行方式如下:
