

通常是高增益光电探测器或光接收器(低电流可驱动,无需中间驱动,控制器可以直接驱动)多数采用“高速”或“数字”光耦,因为它其中一项指标便是数据传输率,以数据信号速率来衡量,可以轻松应用在信号通信中,如R485、SPI、CAN以及I2C等需要隔离的通信,如下是某光耦在手册中标定的速率指标:
但在驱动设计中我们更加要注重它的开关特性,因为我们的目的是传输PWM。在驱动PWM传输中,输出光接收器工作在开/关(ON/OFF)状态,即要么饱和导通,要么截止关断。
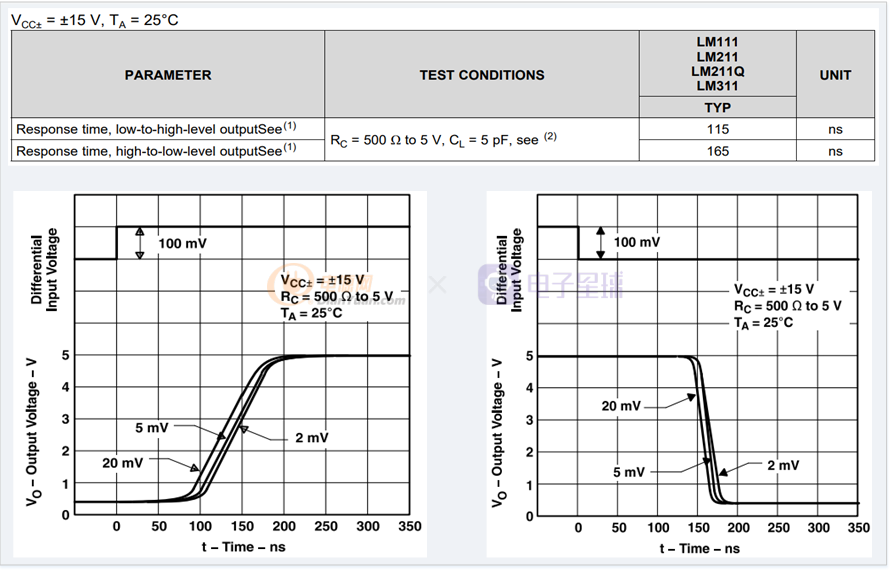
在驱动中,正如前面所说,我们重点介绍适合传输PWM信号的光耦,也就是传输开关控制信号的光耦,这里我们把它命名为“高速开关光耦”,经过不断设计摸索,这里可以用“比较器”和“运算放大器”的用法做一个类比,我们不用运算放大器做比较器,就是因为运算放大器做为信号调理器件通常工作在线性区用于放大信号,如果让其工作在饱和区,难免会存在进入饱和与退出饱和困难的问题,也就是与开关器件相比较,造成较大的延时不确定性,而比较器的特点就是开关动作响应的快速性,内部输出晶体管要么在饱和区,要么就在截止区,并且切换速度高,如下图LM211,低→高和高→低分别为115ns和165ns。
比 较 器 进 入 饱 和 与 退 出 饱 和
对于运放,一旦进入深度饱和,从延时来看,毕竟是灾难性的,一般退保和时间需要数十微秒,所以要求高速应用的情况下避免使用运放做为比较器,也就不谈开关特性。如下是LM2904过载数据,也就是进入饱和后需要恢复的时间“tOR”,典型值为10us。

运 放 退 饱 和 时 间tOR
同理,我们再命名一种相对“高速开关光耦”的器件—“普通光耦”,“开关光耦”和“普通光耦”同样也会有巨大的延时差异问题,但是驱动中,我们要尽量减少延时,达到信号无失真的快速可靠传输,才能满足系统静态和动态的快速响应要求。
难道驱动中不会用到性价比很高的“普通光耦”吗(常见的型号如:PC817),当然不是,比如你对传输实时性和失真度要求不高的信号,我们就可以使用这类光耦,比如传输故障信号,延迟个几十微秒也没有关系,因为关键保护,如短路保护,都是由驱动自身完成的,故障信号反馈给控制器只是让控制器再做出相应的其它动作而已。
如下图,光耦型号分别为HCNW2211和HCNW2611的高速光耦以及PC817和TLP521的普通光耦,对于高速光耦来说,达到开通(饱和)电流阈值,开通过程会快速进入饱和状态;反之,关断过程也会从饱和状态快速进入截止状态。更多细节我们介绍他们的开关传输延迟再说明。

高速和普通光耦进入饱和
普通光耦,有时候我们也把它可以叫做“线性光耦”,其实也不能称为完全的线性光耦,而是“准线性光耦”,因为多数这类光耦在一定范围内保持线性关系,如下在CTR平直的一段内说明放大比例是恒定的。
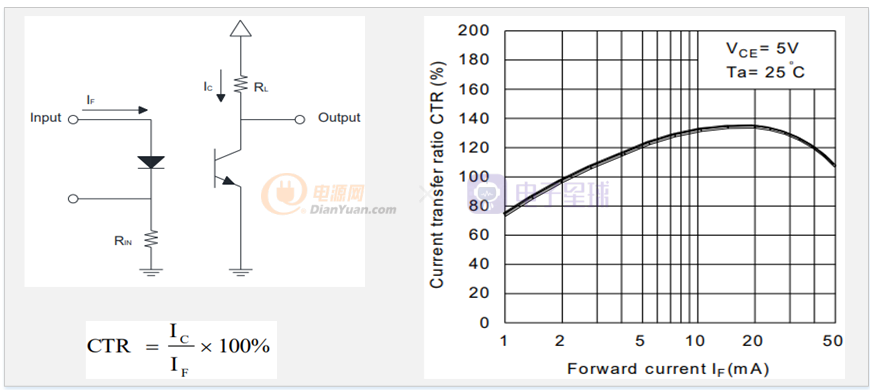
普 通 光 耦 的 电 流 传 输 比 曲 线
普通光耦,通常会给出Ic-IF的关系,即输入二极管正向电流和输出集电极电流,同上图,他们之间也会存在一定的线性关系,其实质也是电流传输比的概念“CTR”。

普 通 光 耦 的 Ic和IF 曲 线
电流传输比CTR是输入和输出电流百分比的关系,如下是某光耦的传输特性参数,其中包含CTR,是50%~600%,把它和三极管电流放大倍数对应的话,就是0.5~6,这就是这个光耦的放大倍数,切不可理解为50~600倍,也就是当IF=5mA时,对应输出Ic电流是5mA*0.5(0.25mA)~5mA*6(30mA),输出超过这个电流时,会从饱和区进入线性区。
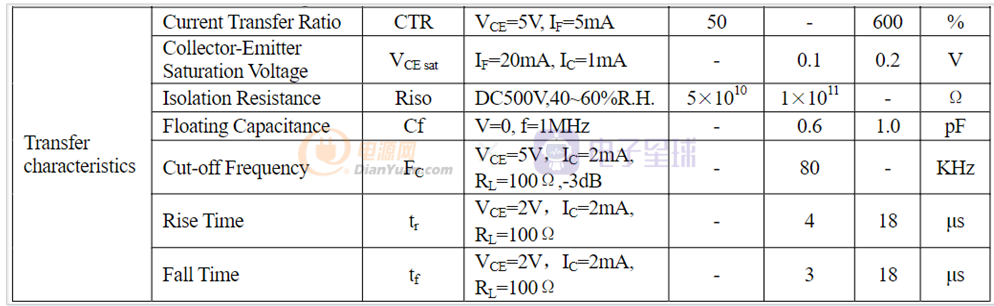
普 通 光 耦 传 输 特 性 参 数
波特率或波特,在电子通信领域,波特(Baud)即调制速率,指的是有效数据讯号调制载波的速率,即单位时间内载波调制状态变化的次数,波特(Baud,单位符号:Bd或bd)。
如10Mbd信号速率=10M bit/s,5Mbd=5M bit/s,比如10M bit/s,波特率周期是100ns,也就是可以传输10MHz频率的信号。另外M bps=M bit/s即兆比特每秒,Million bits per second的缩写。
某 数 字 光 耦 的 特 征 描 述