
最近看了很多大神的逆变教程,有几个问题想要问一下。
1:前级推挽多个管子并联来增加功率,可以过更大电流,那么请问单路管子过的电流以什么来决定的呢?
2:看到了许多人利用如下图方案来加死区时间。那么请问单极性调制的时候,一组桥臂上有驱动信号,而另外一组桥臂始终关断的情况下,不会存在直通问题啊。那为何还要增加死区呢?是否是我对这个调制方法有误解?
3:同样是下图,这个死区延时是否利用RC构成的低通来移相或者滤波,然后再利用与门的高电平门槛来增加死区的?如果不是麻烦帮我解释一下。
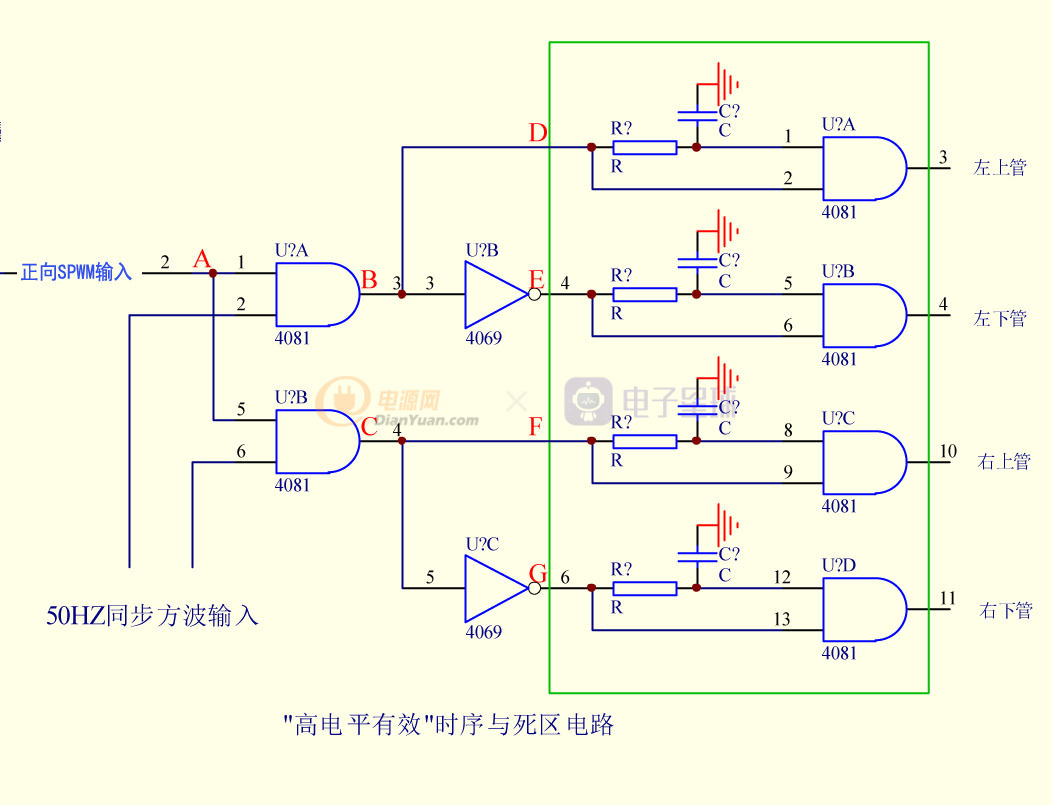
图片引自老寿师傅的帖子。
4:想做个软件控制的逆变电源,利用查表法实现SPWM信号输出,但是看了百度里的一些公式……解释的十分不清楚,看了好几遍仍然不知道怎么计算。希望各位知道这个算法公式的,共享一下。
以上是我暂时想到的几个问题,还希望大家帮忙解答下,谢谢了。
 期待实例出现和大师讲解!
期待实例出现和大师讲解!
