
关于PID参数设计
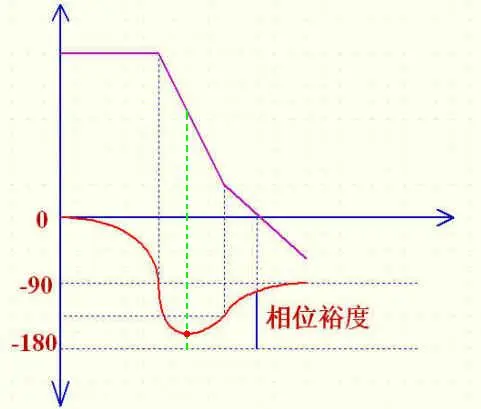
附件中给出了平均电流控制PID参数设计的例子.电流环伯德图为第一个例子7-3输入电压为7V时的电流环开环幅频特性图.可以看出书中给出的参数还是比较理想的.0db穿越点在17.5khz,相位裕量超过60度.实域仿真这个系统,动态响应还是比较优化的. 414741240990088.pdf
全部回复(57)
正序查看
倒序查看
现在还没有回复呢,说说你的想法
希望通过这种方式结识更多的高手.致力于研究开关电流PID参数设计问题的高手.小信号分析是一种工具,在国外使用很广泛,因为每种开关电源都有本身的特性,PID补偿起来比较困难,很难有一种固化的方法来补偿PID.比较实用的方法是测试,但是不是每个公司都有相关的设备.所以小信号的分析变得很有意义.比较通用的做法是建立开环系统的小信号模型,然后画出对应的幅频特性曲线.根据目标的特性曲线来决定与之对应的补偿PID的参数.附件中是关于BUCK电路的小信号分析的论文,个人认为比较通俗易懂,适合初学者. 414741240990873.rar
文件格式为CAJVIEW软件.
文件格式为CAJVIEW软件.
0
回复
提示
@wuji122
希望通过这种方式结识更多的高手.致力于研究开关电流PID参数设计问题的高手.小信号分析是一种工具,在国外使用很广泛,因为每种开关电源都有本身的特性,PID补偿起来比较困难,很难有一种固化的方法来补偿PID.比较实用的方法是测试,但是不是每个公司都有相关的设备.所以小信号的分析变得很有意义.比较通用的做法是建立开环系统的小信号模型,然后画出对应的幅频特性曲线.根据目标的特性曲线来决定与之对应的补偿PID的参数.附件中是关于BUCK电路的小信号分析的论文,个人认为比较通俗易懂,适合初学者.414741240990873.rar文件格式为CAJVIEW软件.
附件打开后怎么是电源网网页?
0
回复
提示
@wuji122
414741241053053.pdf关于控制系统条件稳定的相关资料.
 500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/76/414741241053811.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/76/414741241053811.jpg');}" onmousewheel="return imgzoom(this);">
条件稳定,需要探讨一下.
0
回复
提示
@wuji122
已经发送了
Modeling and Practical Design Issues for Average Current Control.pdf 414741241078833.pdf
0
回复
提示
@wuji122
ModelingandPracticalDesignIssuesforAverageCurrentControl.pdf414741241078833.pdf
Current mode control of a full bridge DC-to-DC converter with a two inductor rectifier.pdf 414741241328216.pdf
0
回复
提示
@wuji122
电源反馈设计速成篇之一建模篇(Voltagemode,CCM).pdf
希望借这个帖子能有幸结识高手,环路参数设计一直是个难题,大家可以发表个人的看法,多交流,多探讨,我相信凭借大家的努力,我们一定能够解决这个问题.我以前是自动控制理论专业毕业的,但是对波德图的矫正方面了解比较少,可惜自己多年的学习了.在学校时我们主要学习数字计算机控制系统,学了不少的算法,唉,大部分不怎么实用,纸上谈兵吧!工业控制现场主要以数字PID算法为主,但是方法似乎比较简单,普通的控制系统PI足也,一般的思路是先使用比例来调节,调节至一定的程度,加积分环节,由小加到大,直到系统输出快速性,而且无静差为止.
0
回复
提示
@wuji122
希望借这个帖子能有幸结识高手,环路参数设计一直是个难题,大家可以发表个人的看法,多交流,多探讨,我相信凭借大家的努力,我们一定能够解决这个问题.我以前是自动控制理论专业毕业的,但是对波德图的矫正方面了解比较少,可惜自己多年的学习了.在学校时我们主要学习数字计算机控制系统,学了不少的算法,唉,大部分不怎么实用,纸上谈兵吧!工业控制现场主要以数字PID算法为主,但是方法似乎比较简单,普通的控制系统PI足也,一般的思路是先使用比例来调节,调节至一定的程度,加积分环节,由小加到大,直到系统输出快速性,而且无静差为止.
好东西啊,比较实用.
近两周一直在看环路,我的基本原则是先算后测,尽量让测到的和计算出来的基本符合,这样调环路就会比较快,而不是试来试去.
对于开关电源整个环路,仿真只是参考,除非有精确的每一个器件模型,但这是不可能的.实践也证明了这一点,手头项目仿真出的动态是60mV,而实际测出的是160mV.这还是用simplis仿出的.我仿的目的就是为了看动态,但没有用.
寄生的东西难以估计.
近两周一直在看环路,我的基本原则是先算后测,尽量让测到的和计算出来的基本符合,这样调环路就会比较快,而不是试来试去.
对于开关电源整个环路,仿真只是参考,除非有精确的每一个器件模型,但这是不可能的.实践也证明了这一点,手头项目仿真出的动态是60mV,而实际测出的是160mV.这还是用simplis仿出的.我仿的目的就是为了看动态,但没有用.
寄生的东西难以估计.
0
回复
提示
@胡庄主
好东西啊,比较实用.近两周一直在看环路,我的基本原则是先算后测,尽量让测到的和计算出来的基本符合,这样调环路就会比较快,而不是试来试去.对于开关电源整个环路,仿真只是参考,除非有精确的每一个器件模型,但这是不可能的.实践也证明了这一点,手头项目仿真出的动态是60mV,而实际测出的是160mV.这还是用simplis仿出的.我仿的目的就是为了看动态,但没有用.寄生的东西难以估计.
看来胡老师是高手.能够计算出来整个开环传递函数也很厉害了,尤其对于大功率系统.对于全桥结构的系统,一般是等效成一个简单的电路模型,但是可能会忽略很多的参数,比如原边变压器漏感,滤波电解电容的ESR变化问题,ESL问题,有效占空比的丢失问题等等.个人认为大部分的寄生参数对整个环路的影响是可以忽略的,一般考虑到比较恶劣的情况,然后进行环路设计,这样得到的参数基本上是可以使用的;经过实际的调整后可以达到最优化.我对双闭环控制系统比较感兴趣,希望能得到胡老师的指教.
0
回复
提示
