

自动化物流系统可以对库存的入库、出库、移库、盘点等操作进行全面的控制和管理,对物品进行实时分析与控制,为企业管理者作出正确决策提供依据,将库存量减至最优存储量,大幅提高资金流转速度与利用率,降低库存成本;从物流效率和管理水平、空间利用率、人工成本、等方面可以看出,自动化物流系统与传统物流系统相比,具有更加明显的优势。
今天简单分享一下物流自动化仓储分拣系统的自动识别原理,下面是基本的原理图:
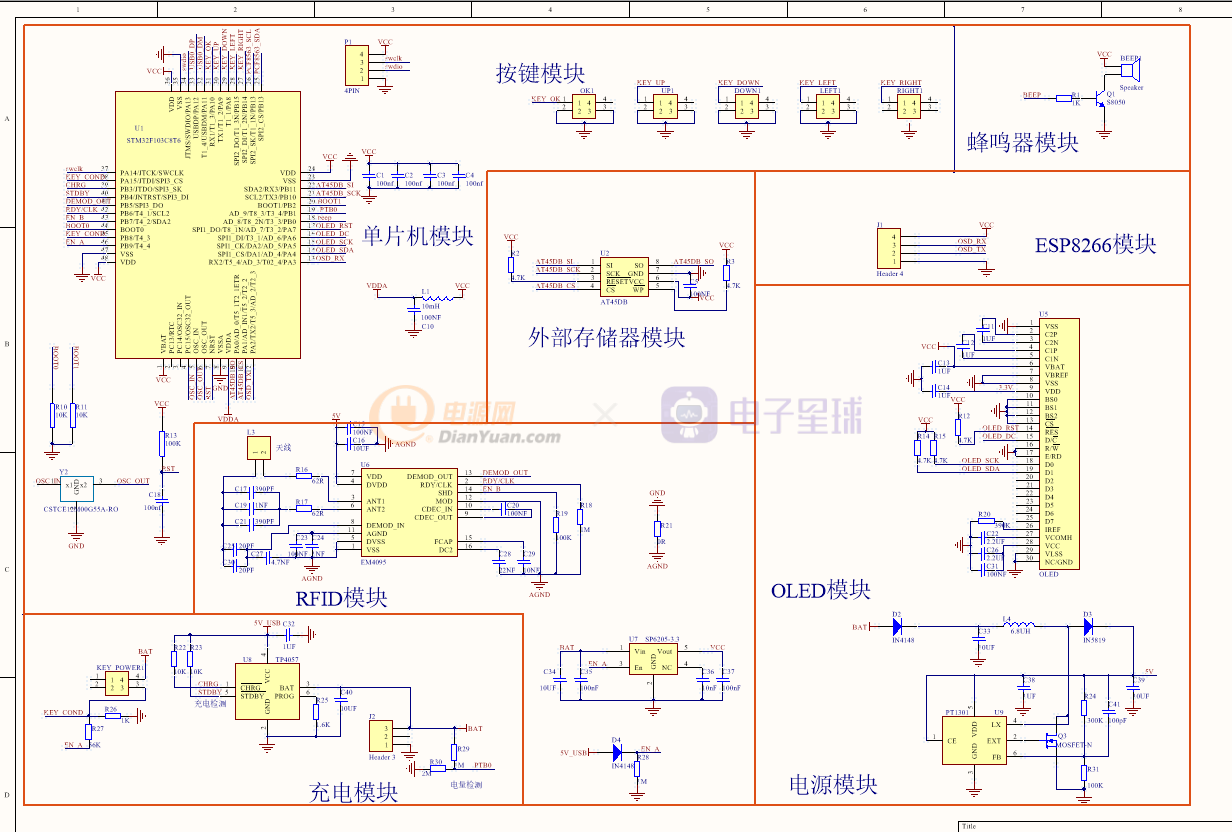
具体工作原理如下:
主控MCU采用stm32F103C8T6,是目前非常常用的一个单片机型号,采用M3内核,72M主频,采用射频模块主要是用来获取RFID标签中的数据信息,当系统处于主菜单时,按下键盘中的OK键,启动射频模块(拉低SHD引脚)。单片机通过捕获EM4095的DEMOD_OUT引脚输出的曼切斯特码波形,利用解码算法获取当前读入标签的信息。如果读取到标签的信息,则在屏幕上显示标签ID号;并通过单片机TTL串口将数据通过wifi模块发送给服务器
一、一键启动电路
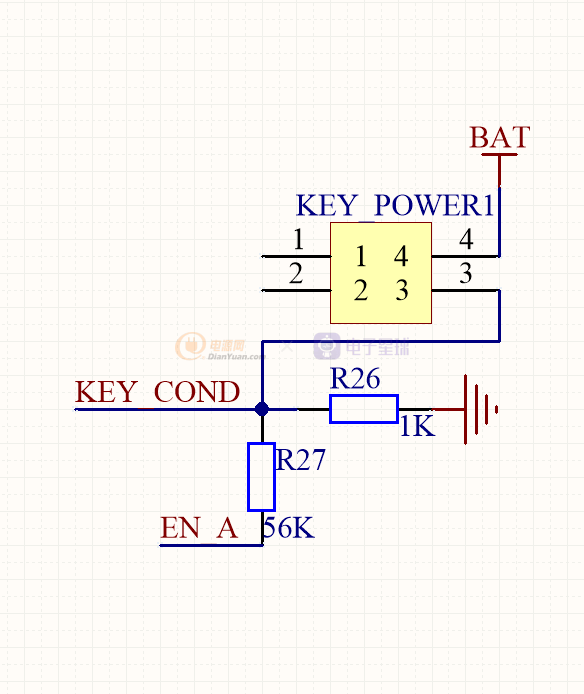
图中KEY_COND和EN_A分别与单片机的IO口相连。其工作原理为:
- 当系统处于关闭时,EN_A通过R26处于低电平,SP6205稳压器不工作,此时系统没有上电。当按下电源键(KEY_POWER),EN_A为高电平,系统启动。又由于EN_A与IO脚相连,启动后立即将EN_A拉高,这时抬起电源按键,实现自锁,系统正常工作。
- 当系统处于运行状态时(电源键没有按下),此时EN_A为高电平,但由于分压电阻R24,R25的存在,KEY_COND上的电压只有50mV可以认为是低电平,当按下电源按键,此时KEY_COND拉高并能被单片机读取,当抬起电源按键后KL25将与EN_A相连的IO脚电平拉低,这时SP6205停止工作,系统关闭。
二、射频模块识别原理
射频模块这块是采用识别近距离RFID标签并为节省能源降低功耗,因此选用低频段RFID技术,选用EM5095芯片作为射频模块的主芯片。EM4095是EM MICROELECTRONIC公司开发的一款CMOS集成的应用于100kHz~150kHz频率的RFID系统的收发前端芯片,其工作电压为5V,主要完成的工作是:
EM4095与单片机连接的信号有三个引脚,用于数据和时钟的传输以及系统对EM4095的驱动和控制:
- DEMOD_OUT:输出信号,为EM4095感应到线圈上的AM信号后经过解调后得到的曼彻斯特编码信号,将之接收并解码校验后可得到所读出的标签的值。
- RDY/CLK:时钟信号,为EM4095从天线线圈上提取出的经过谐振后的时钟频率,范围应在100kHz-150kHz,而本文所设计的系统此频率在125kHz。
- SHD:休眠控制信号,此引脚为高电平时,EM4095将被强制进入休眠状态,天线线圈上没有电流,目的是保护芯片和节省能源。
- EM4095与单片机的连接方式并不是标准的控制和通信接口,无法利用单片机任何现成的控制和接口单元对其进行驱动和控制,根据EM4095的DEMOD_OUT,RDY/CLK和SHD这三个引脚,并按其数据手册上工作原理进行控制。
- DEMOD_OUT为EM4095感应到线圈上的AM信号后经过解调后得到的曼彻斯特编码信号,因此将与DEMOD_OUT引脚连接的单片机的IO设置为输入,将曼彻斯特编码信号读入到单片机中。
- RDY/CLK为EM4095的时钟信号,主要是在系统启动时,检测EM4095芯片能否正常工作。
- SHD引脚控制的内容为EM4095的线圈加电,在不需读取RFID标签信息时将SHD引脚拉高,线圈未上电,EM4095不工作;在需要读取RFID标签信息时将SHD引脚拉低,EM4095正常工作
三、源码分析
检测方法1).确定起始位,首先要正确找到数据1 按规则下跳为1 上跳为0. 可检测高电平并等其变低 但这会把0错检为1因为0也存在高电平。但是如果检测到一个周期的高电平(数据01)则可 确定找到了数据1,找到1后就可以同步了,因为EM4100卡最后一位数据就是0正好可以利用 作为判断的特征。
2).对于数据的确定,由于有了同步则可在同步后延时384us即3/4个码原周期在判断接受段电平如何 如为高则置数据为1,并一直等到低电平的出现,相反则等高电平的出现,并在此之间插入超时 判断。这样,一个完整的数据判断就完成了,并确保数据的准确性,另外这种方法的抗干扰性 会非常好,而如果采用定时同步的话则会因信号的畸变而引起数据出错,整体会导致读卡几率降低 但是此程序也有其缺点,因为采用纯延时判断的手段,因此其占用单片机的运行时间比较大。
3).同步后开始接受同步数据即9个1,这一部分用一个循环做,如果出错则放弃接收
4).同步数据接收完后,则开始接受数据,数据分11行5列接收以利于校验位的判断 如有出错则放弃数据
5).如一切正常则返回卡号,如因尝试读卡次数到了则返回0以表示没有识别到标签
//读取卡号,
ulong Read_Card()
{
uchar i=0; //起始为的计数值
uchar error; //时间溢出的计数值
uchar error_flag; //时间溢出标志
uchar row,col; //行列寄存器
uchar row_parity; //行校验寄存器
uchar col_parity[5]; //列校验寄存器
uchar _data; //数据寄存器
ulong temp; //卡号寄存器
ulong timeout=0; //搜索次数寄存器
while(1)
{
if(timeout==10)return 0;//尝试10次搜索,如没有责返回0
else timeout++;
error=0;
while(Manchester_IN==0)//等高电平
{
if(error==TIME_OF)break;//超时退出
else error++;
}
if(error==100)continue;//结束本次主循环
else error=0;
Delay384us();
if(Manchester_IN)//寻找真正的1起始位,利用01的波形确定1起始位,即最后一位加第一位
{
for(i=0;i<8;i++)//判断是否是真的起始位
{
error=0; //限定等待时间
while(Manchester_IN)
{
if(error==TIME_OF)
{
error_flag=1;//时间溢出
break; //退出
}
else error++;
}
Delay384us(); //延时至下一码原
if(Manchester_IN&&error_flag==0); //判断下一位是否为1 和是否没有时间溢出
else break; //不是1退出,溢出退出
}
if(error_flag)//因时间溢出造成的本次主循环退出
{
error_flag=0;
continue; //退出本次循环
}
else;
if(i==8) //起始位接受完并且正确后开始接受数据
{
error_flag=0;
error=0; //限定等待时间
while(Manchester_IN)
{
if(error==TIME_OF)
{
error_flag=0;
break; //时间溢出造成的出错
}
else error++;
}
if(error_flag)
{
error_flag=0;
continue; //因等待待第一个正式数据错误引起的本次主循环退出
}
else;
//所有列校验清零
col_parity[0]=col_parity[1]=col_parity[2]=col_parity[3]=col_parity[4]=0;
for(row=0;row<11;row++) //共11行数据
{
for(col=0,row_parity=0/*行校验清零*/;col<5;col++)//共5列数据
{
Delay384us(); //延时至下一码原
if(Manchester_IN)_data=1; //数据为1
else _data=0; //数据为0
if(col<4&&row<10) //数据区的接受,后四个字节
{
temp<<=1; //左移一位
temp+=(ulong)_data; //数据相加
}
else;
row_parity+=_data; //行校验加入数据
col_parity[col]+=_data; //相应列校验加入数据 虽最后一列没有校验但为了方便也加上
error=0; //限定等待时间清零
while(Manchester_IN==(bit)_data)
{
if(error==TIME_OF) //由于时间溢出造成的数据出错
{
error_flag=1;
break; //退出本while循环
}
else error++;
}
if(error_flag)break; //出错退出内层for循环
else;
}
if(row<10)//最后一行没有校验所以要加限制
{
if((row_parity&0x01)||error_flag) //出错退出外for循环
{
temp=0;
error_flag=1;
break; //退出
}
else;
}
else;
}
//对最后接收的列校验进行判断,及对来自上面数据错误error_flag处理以结束本次主循环
if(error_flag||((col_parity[0]&0x01)&&(col_parity[1]&0x01)&&(col_parity[2]&0x01)&&(col_parity[3]&0x01)))
{ //最后一列没有校验
error_flag=0;
temp=0;
continue; //退出本次循环
}
else return temp;//将正确的数据返回
}
continue;
}
continue;
}
}四、OLED显示
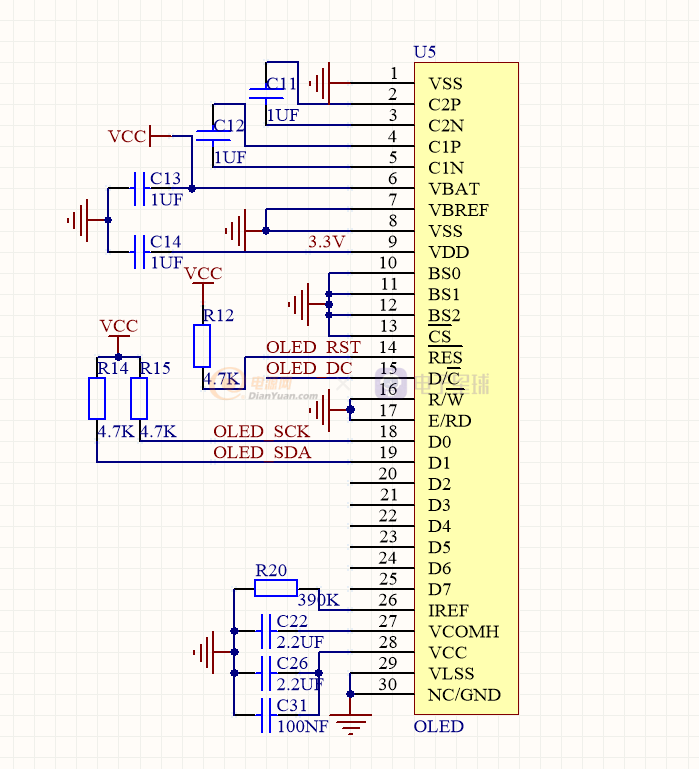
OLED显示货物识别状态信息,采用SPI串口的通讯模式控制数据的传输和显示,OLED模块与单片机连接的引脚共有4个,分别为OLED_RST,OLED_DC,OLED_SCK,OLED_SDA。
- OLED_RST为OLED模块的复位引脚,低电平时OLED模块复位;
- OLED_DC控制写入的是数据是控制命令还是普通的点阵数据。当OLED_DC拉高时,写入的数据为显示的点阵数据;当OLED_DC拉低时,写入的数据为OLED的控制命令;
- OLED_SCK为单片机与OLED通信的时钟信号线;
- OLED_SDA为单片机与OLED通信的数据信号线。
配套资料中有射频模块的驱动程序,欢迎下载。