1、参考
安富莱FREERTOS教程(F103)、安富莱F4系列BSP库、战舰原理图
相关产出:如何添加HA库相关.C.H文件
2、硬件平台
正点原子-战舰平台,keil。
3、移植目标
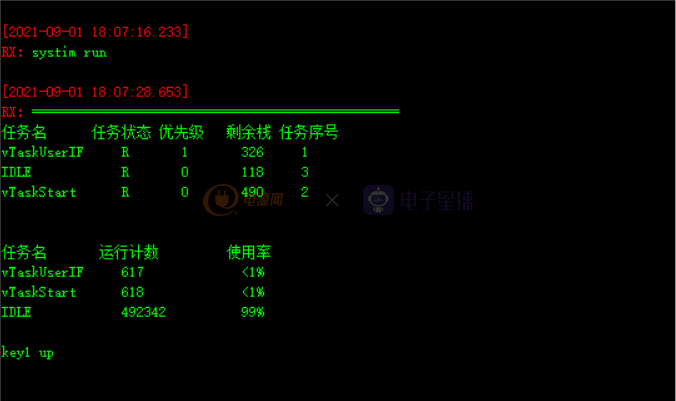
将F4的HAL,BSP代码库移植到F1中。同时完成FreeRTOS移植,并通过串口将FreeRTOS的线程运行状态通过串口打印出来。
4、移植过程
通过CUbemx软件创建F103标准模板文件,通过《安富莱FREERTOS教程(F103)》、安富莱F103FREE例程将相关源码进行复制,实现FreeROTS移植。移植完成之后,通过设置GPIO引角点亮LED灯,检测移植是否完成。(备注:本次所使用的代码,在GPIO外设上使用的BSP库,也可以不使用直接使用HAL库在线程里面控制)
有了模板之后,通过参考《安富莱F4系列用户手册》,安富莱F4BSP库代码,将BSP库移植到战舰开发板中,在移植过程中主要修改一下内容:
1、key相关,同时LED文件也需要相关的修改,和key。c文件差不多,关于串口文件,只需要将文件移植过去之后,修改至编译通过即可。
#define HARD_KEY_NUM 1 /* 实体按键个数 */
#define KEY_COUNT (HARD_KEY_NUM + 0) /* 4个独立建 + 2个组合按键 */
/* 使能GPIO时钟 */
#define ALL_KEY_GPIO_CLK_ENABLE() { \
__HAL_RCC_GPIOA_CLK_ENABLE(); \
__HAL_RCC_GPIOE_CLK_ENABLE(); \
};
/* GPIO和PIN定义 */
static const X_GPIO_T s_gpio_list[HARD_KEY_NUM] = {
// {GPIOE, GPIO_PIN_2, 0}, /* K1 */
{GPIOE, GPIO_PIN_3, 0}, /* K2 */
// {GPIOE, GPIO_PIN_4, 0}, /* K3 */
// {GPIOA, GPIO_PIN_0, 1}, /* K4 */
};
/*一下需要注意一下,安富莱在板子上添加了上拉电阻,但是战舰的板子没有添加,在按键初始化的时候,需要根据实际情况设置上拉和下拉*/
static void bsp_InitKeyHard(void)
{
GPIO_InitTypeDef gpio_init;
uint8_t i;
/* 第1步:打开GPIO时钟 */
ALL_KEY_GPIO_CLK_ENABLE();
/* 第2步:配置所有的按键GPIO为浮动输入模式(实际上CPU复位后就是输入状态) */
gpio_init.Mode = GPIO_MODE_INPUT; /* 设置输入 */
gpio_init.Pull = GPIO_PULLUP; /* 上下拉电阻不使能 */
gpio_init.Speed = GPIO_SPEED_FREQ_HIGH; /* GPIO速度等级 */
for (i = 0; i < HARD_KEY_NUM; i++)
{
gpio_init.Pin = s_gpio_list[i].pin;
HAL_GPIO_Init(s_gpio_list[i].gpio, &gpio_init);
}
// gpio_init.Pull = GPIO_PULLDOWN; /* 上下拉电阻不使能 */
// gpio_init.Pin = s_gpio_list[3].pin;
// HAL_GPIO_Init(s_gpio_list[3].gpio, &gpio_init);
}2、定时器相关,在系统进行监测线程的时候需要一个,更短时间间隔的计数,在这里使用定时器实现。在bsp_timer_pwm.c文件只使用到了bsp_SetTIMforInt();该函数,在编译时会有报错,将报错注释掉即可。同时编写相关的中断函数,实现ulHighFrequencyTimerTicks的计数。
/*
*********************************************************************************************************
* 函 数 名: vSetupTimerTest
* 功能说明: 创建定时器
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void vSetupSysInfoTest(void)
{
bsp_SetTIMforInt(TIM6, timerINTERRUPT_FREQUENCY, timerHIGHEST_PRIORITY, 0);
}
/*
*********************************************************************************************************
* 函 数 名: TIM6_IRQHandler
* 功能说明: TIM6中断服务程序。
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void TIM6_IRQHandler( void )
{
if((TIM6->SR & TIM_IT_UPDATE)!= RESET)
{
ulHighFrequencyTimerTicks++;
TIM6->SR = (uint16_t)~TIM_IT_UPDATE;
}
}5、最后效果