爱普生视觉系统:
基于控制器的视觉系统结构组成

基于PC的视觉系统结构组成

废话不多说,直接上步骤:
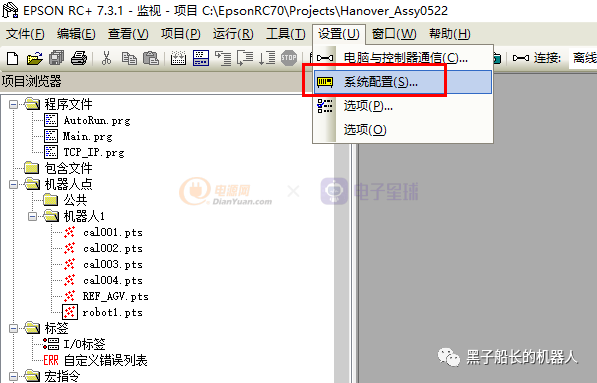
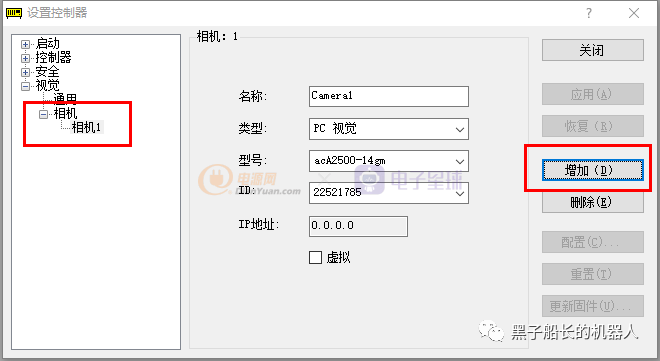
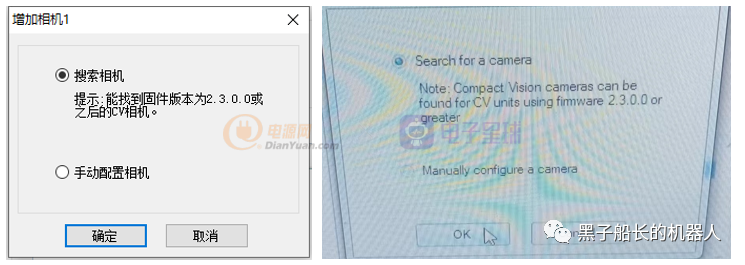
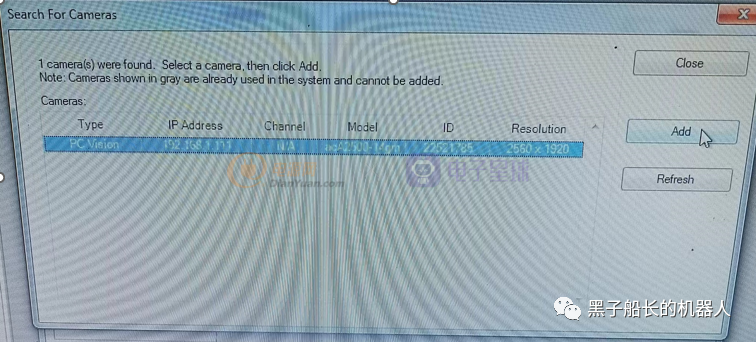
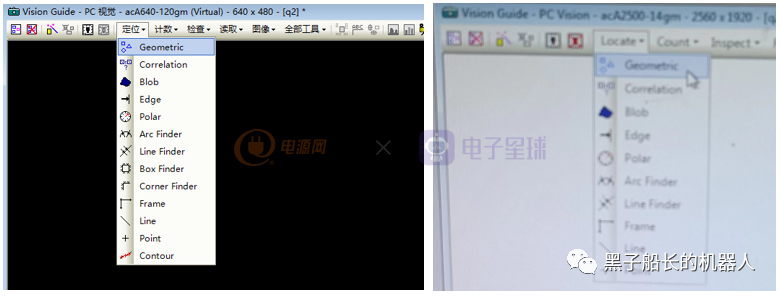
一、搜索添加相机。
1、添加相机。
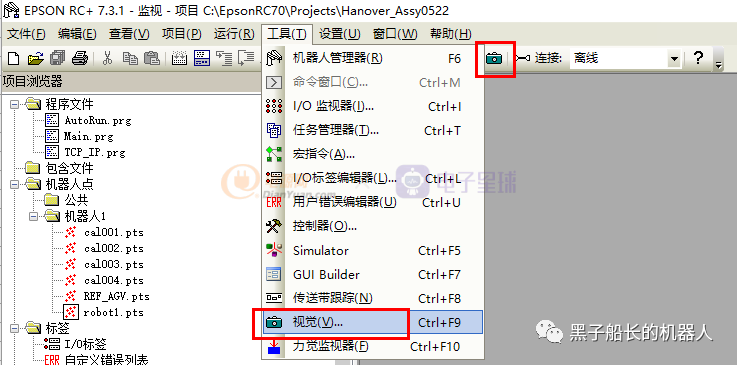
二、序列和校准
2、新建序列。


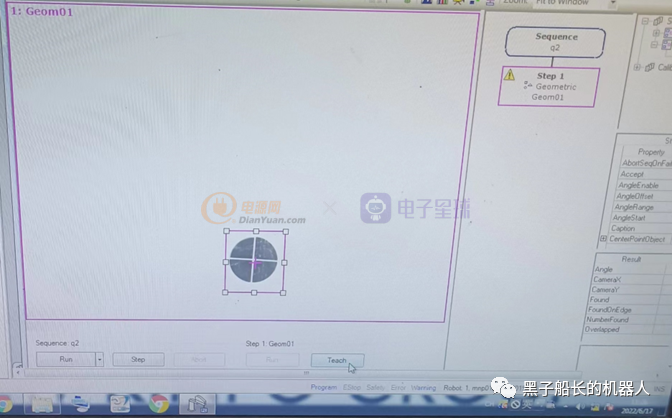
3、添加几何工具。
4、将几何工具最外围的方框布满整个视野,小方框对准需要识别的物体,并点击下面的示教按钮,示教完成后在,运行以下序列,查看识别该物体。
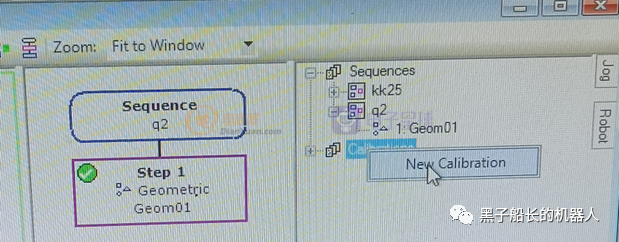
5、校准,新建校准。
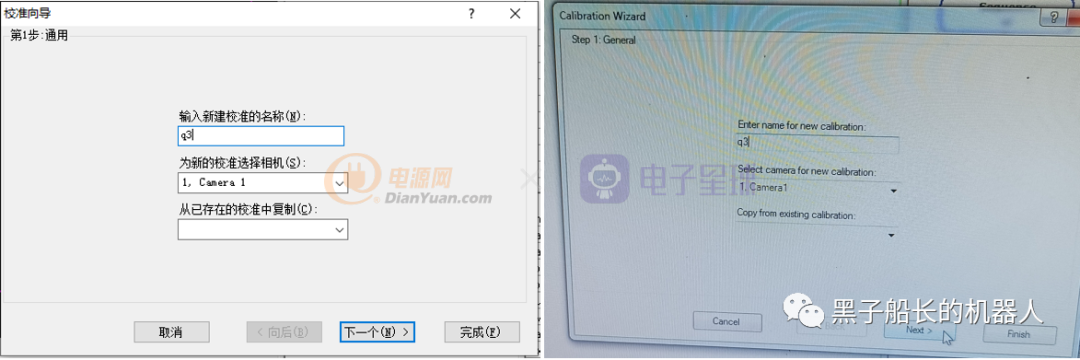
6、输入校准的名字,相机选择前面搜索到的相机。
7、选择机器人相机安装方式,安装在第6关节。

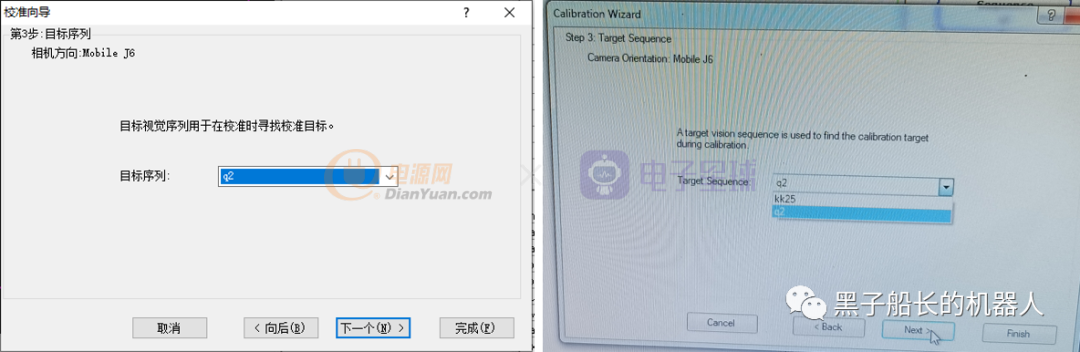
8、选择序列。
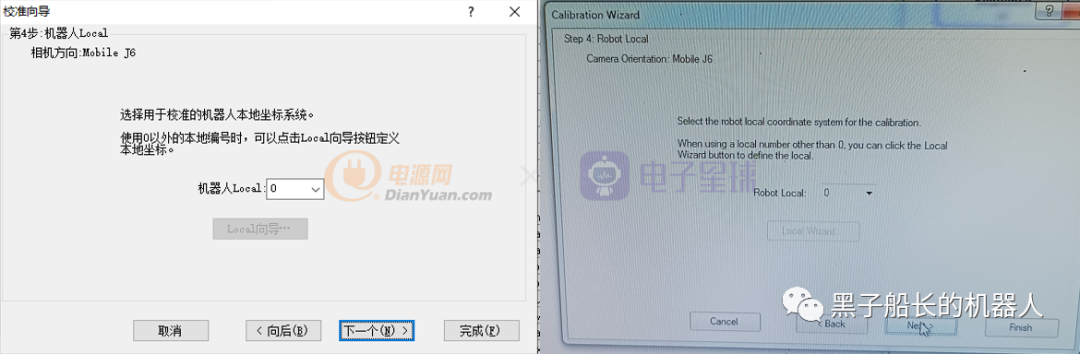
9、Local0,此处是相当于工件坐标。Local0相当于机器人基坐标。
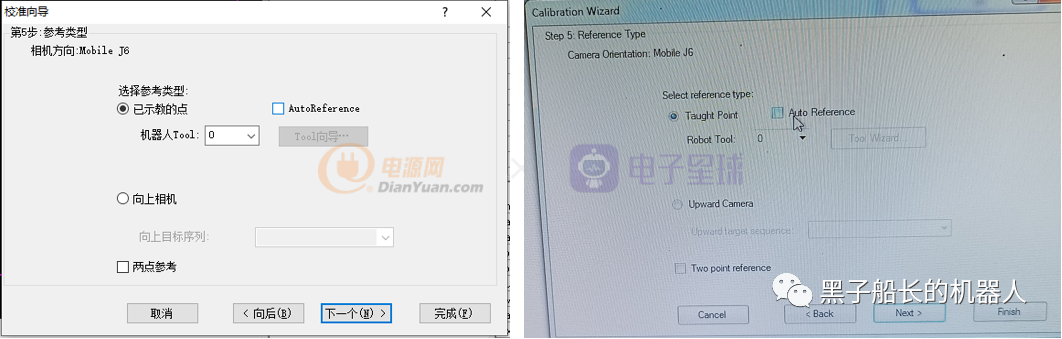
10、选择已示教的点,选择机器人工具坐标。
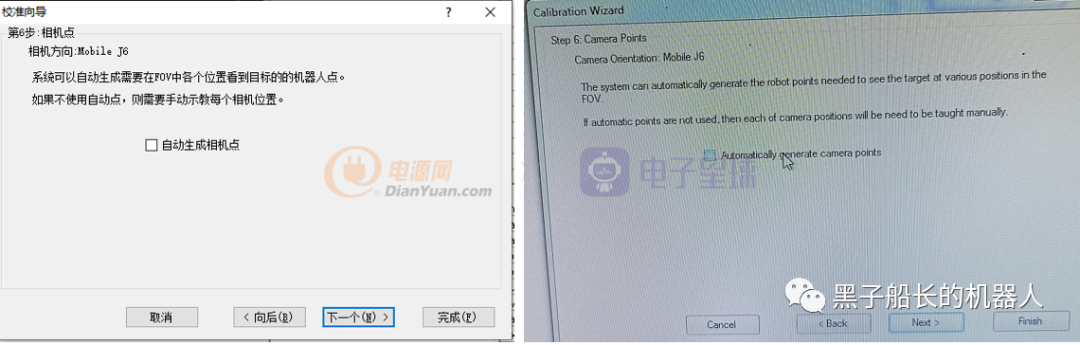
11、手动生成xiang相机点。
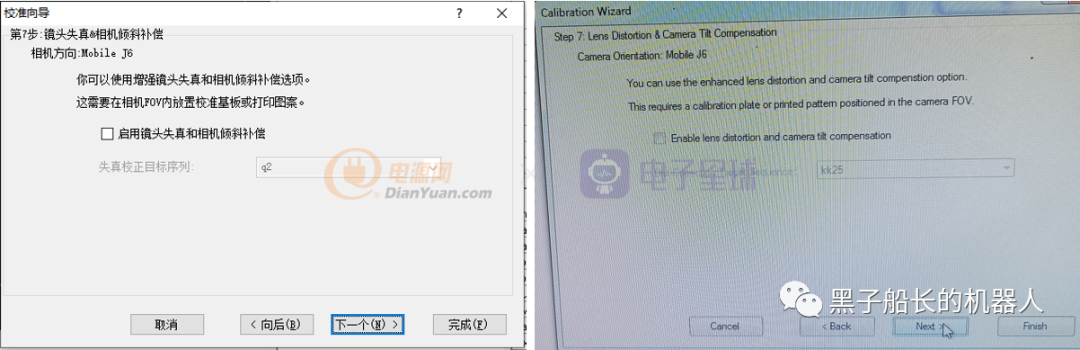
12、镜头失真和相机倾斜补偿。
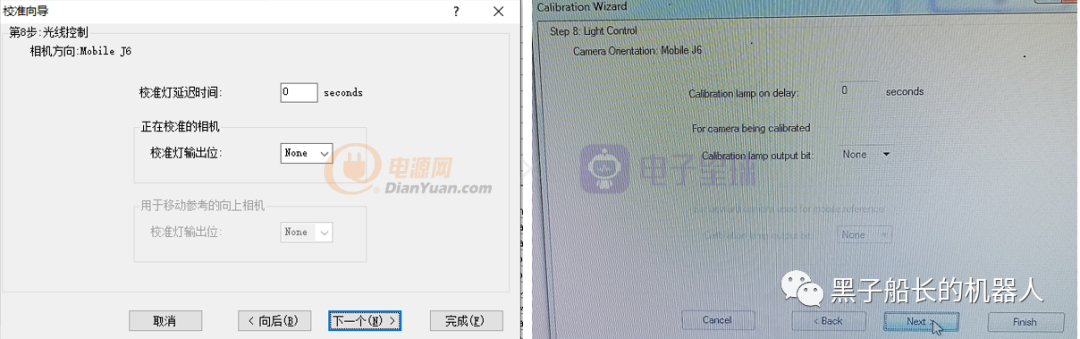
13、光线控制。
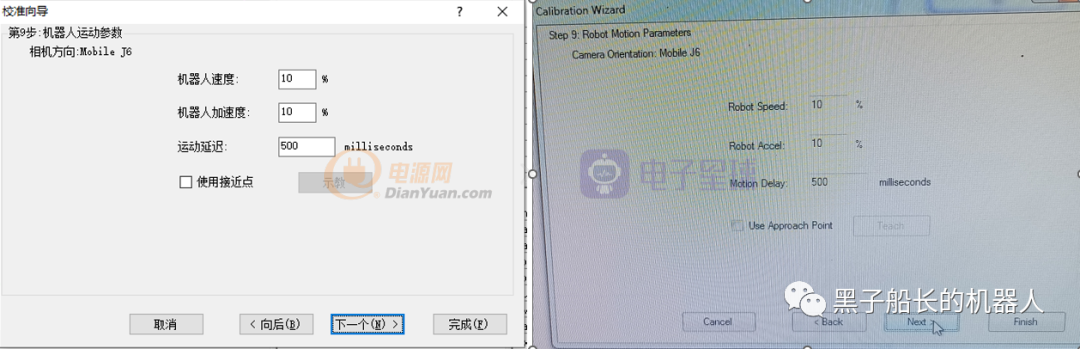
14、机器人参数,机器人校准时的移动速度。
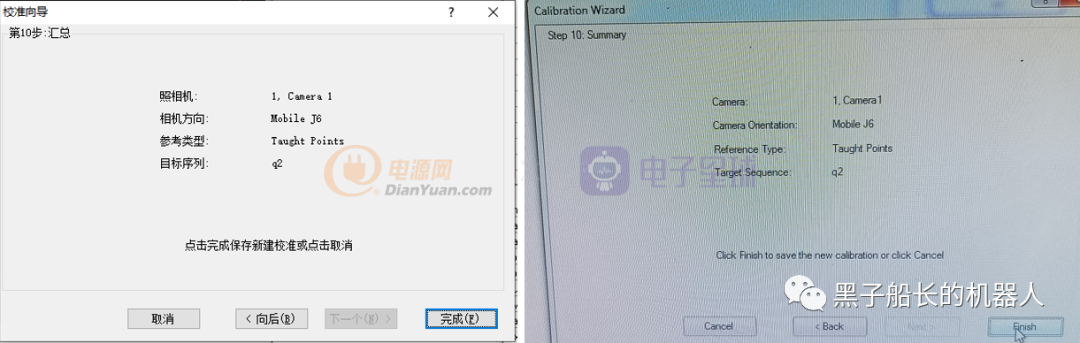
15、完成结果。
三、实际校准
16、示教点
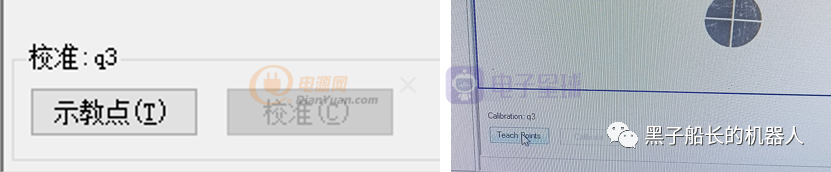
17、移动机器人,依次使物体处在视野的左上方,上中,右上方,右中,中间,左中,左下方,下中,右下方,并点击示教9个点

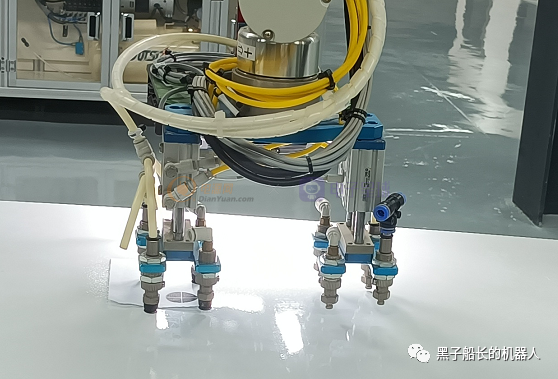
18、9个点示教完成以后,再示教一个参考点(抓取点),移动机器人的吸盘位于抓取物体的位置,作为抓取参考点。
四、视觉程序。
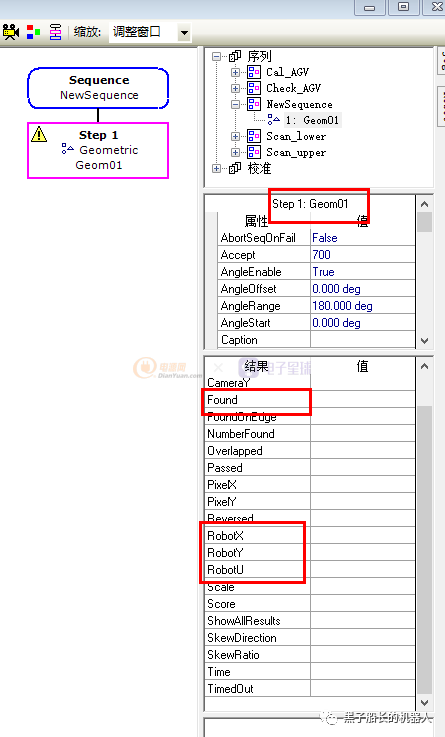
结果参数
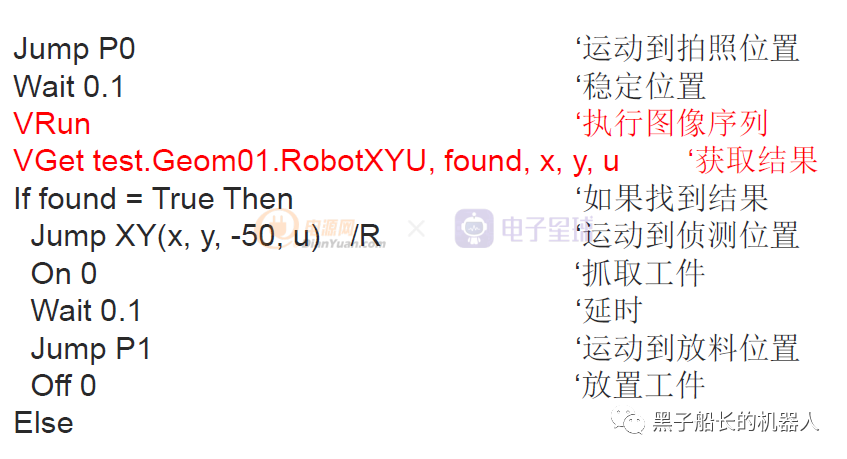
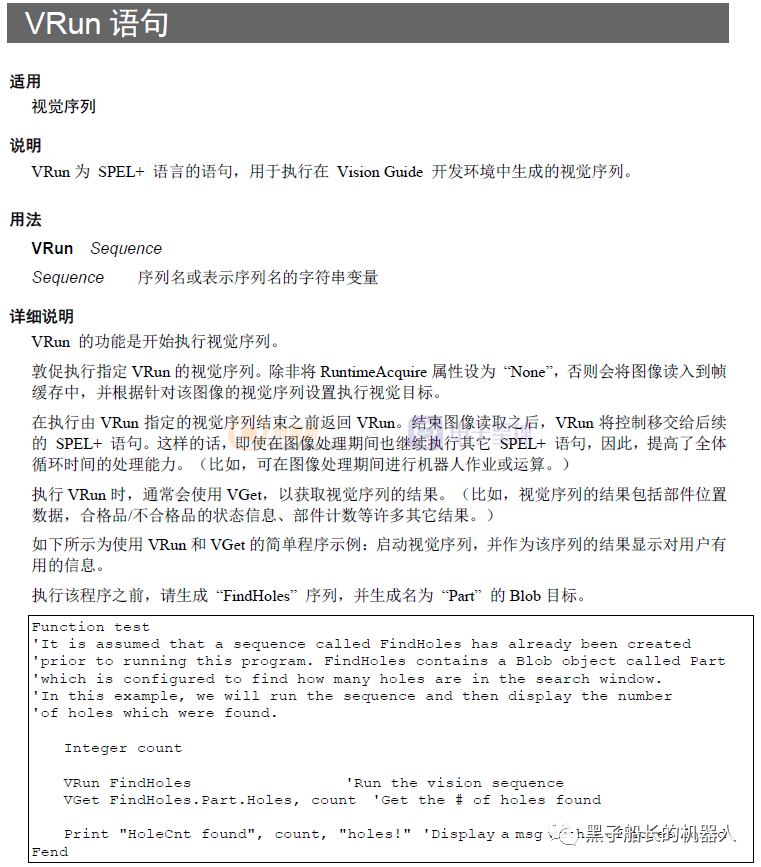
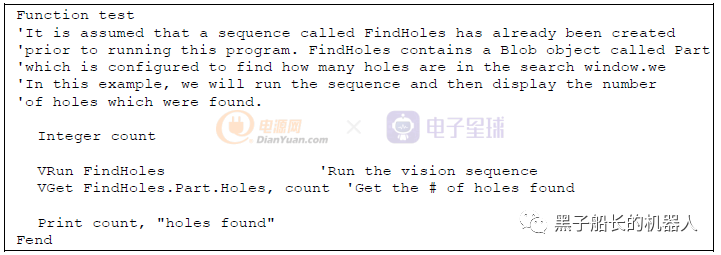
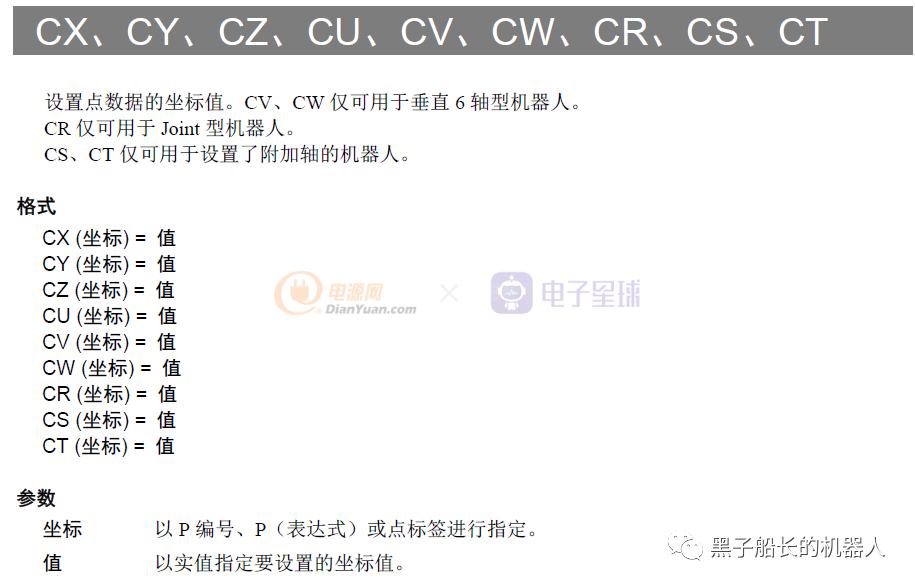
相关函数和指令: