鉴于“西门子仿真S7-PLCSIM Advanced V3.0与RobotStudio 6.0 的Socket通讯”,KUKA的Ethernet KRL也是基于TCP/IP的通讯,所以就进行了一下小测试,中间还是耗费了一点时间的,主要是虚拟机和主机的通讯问题,还好结果是完美的。接下来一起来看看效果吧。
一、什么是KUKA Ethernet KRL ?
EhternetKRL是KUKA提供的一个以太网通信功能的可选软件包,支持TCP/IP和UDP/IP协议.
1-通过EKI(Ethernet KRL Interface),可以将KUKA机器人配置为服务器或者客户端,与外围设备(相机、上位机,PLC,三维扫描仪等)进行以太网通讯
2-外部系统通过EKI交换数据,机器人系统接收外部发送来的XML配置文件,进行处理以后,将信息通过XML形式再发送给外部设备,从而实现稳定高效的数据通信。3-通讯数据默认以TCP/IP协议传输,从而保证了数据的完整高效。也可以使用UDP/IP协议,因为UDP/IP协议无法保证识别数据丢失(俗称丢包),所以库卡官方并不推荐使用UDP协议。4-在一些对数据包完整性不敏感的特殊应用场合,因为UDP协议的响应速度等特性,UDP同样得到了广泛的应用(例如,通过UDP协议,机器人在运动过程中不断将自身位置信息发送给上位机系统,并向三维扫描仪发送同步信号,这样,上位机系统就可以拟合出三维扫描仪检测到的工件模型,为三维表面检测提供了一种可行的方案)。
二、准备的软件(我使用的版本)
- TIA Portal V16
- S7-PLCSIM Advaced V3.0
- KUKA Officelite8.3、EthernetKRL选项包
- SocketTool(用于测试)
三、KUKA Officelite运行EthernetKRL
请各位参考,安德鲁机器人微信公众号里面的文章“库卡机器人之Officelite运行EthernetKRL”,也就是传说中的“老王”的个人公众号,里面有详细的介绍和操作。
四、TIA Portal V16中的编程设置
可以参照“西门子仿真的PLC与RobotStudio 6.0 的仿真通讯”。
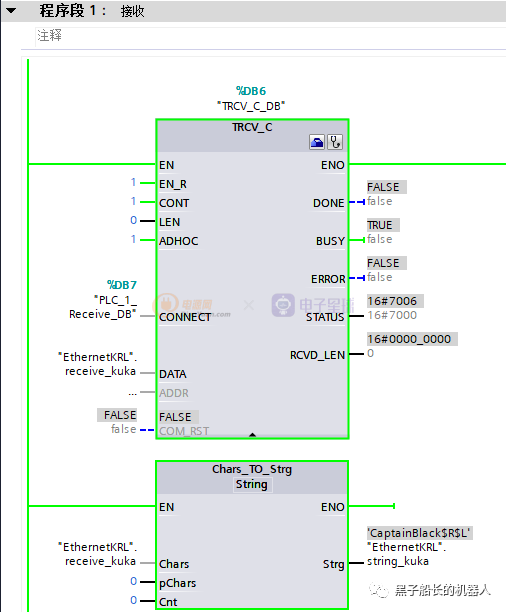
1、接收指令
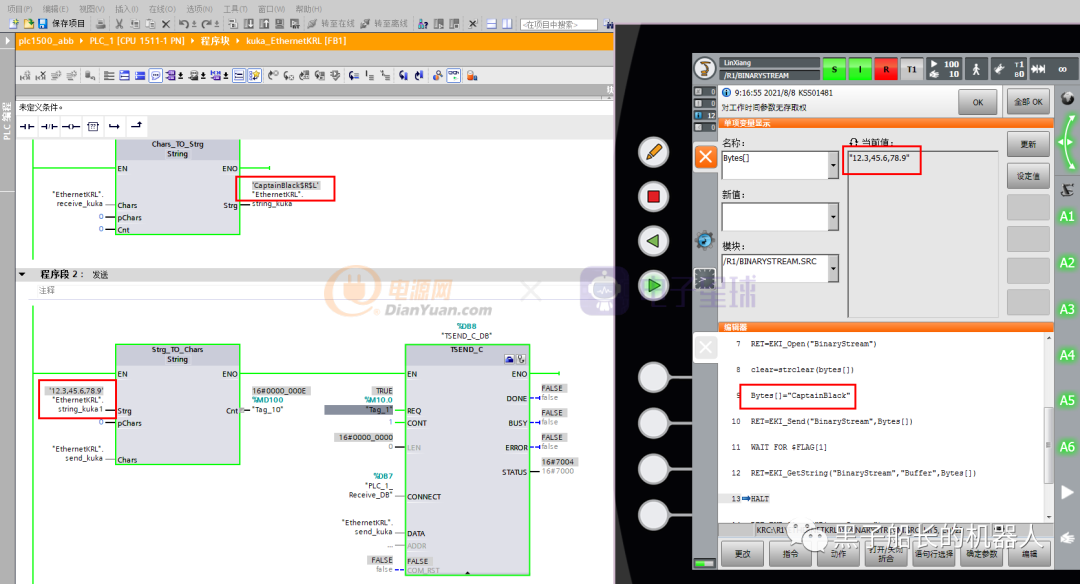
2、发送指令

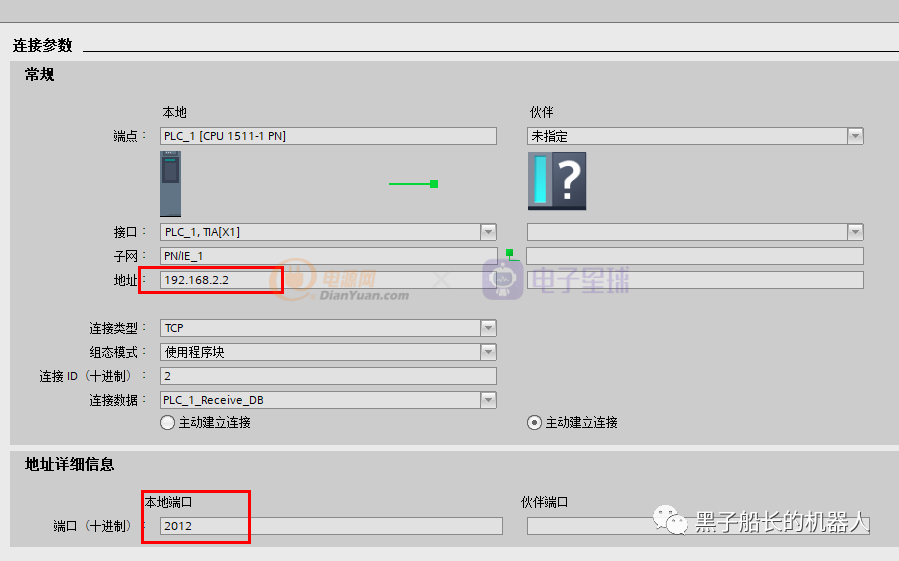
3、通讯配置
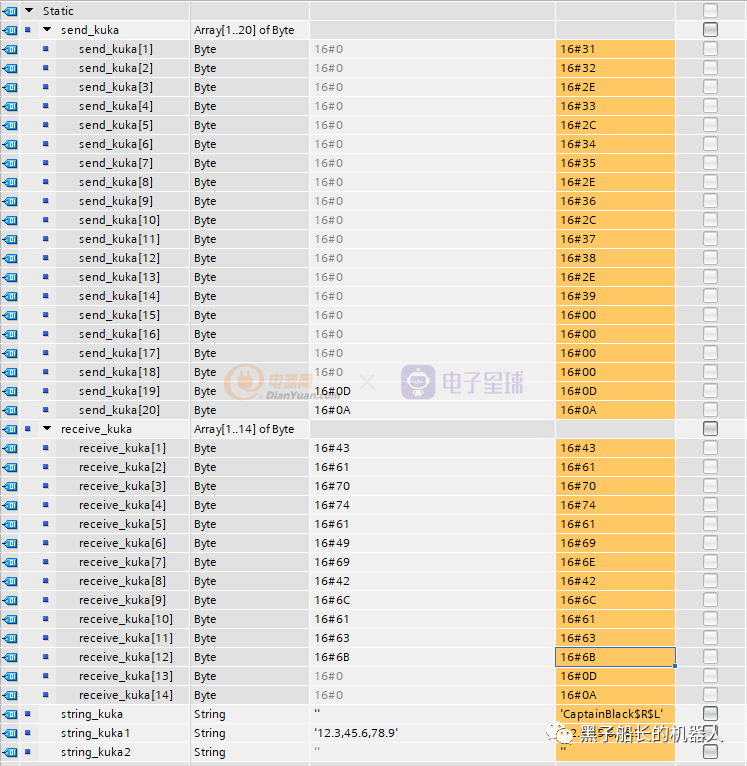
4、数据块
5、S7-PLCSIM Advaced V3.0的设置参考“西门子仿真的PLC与RobotStudio 6.0 的仿真通讯”

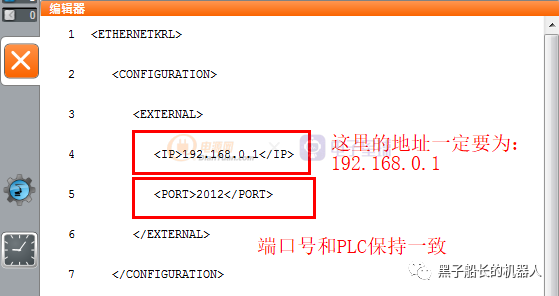
四、KUKA Officelite虚拟机示教器中的程序1、kuka router的设置,IP地址和端口号和PLC一致。

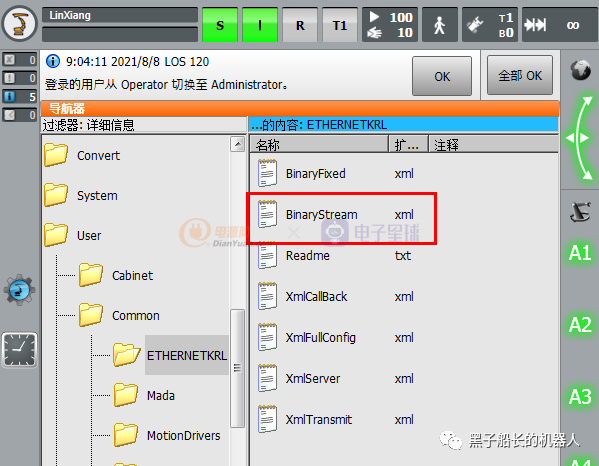
2、通讯XML文件的配置,使用的是默认的BinaryStream。
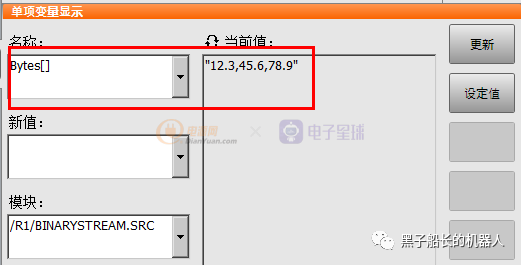
3、BinaryStream.src文件编程
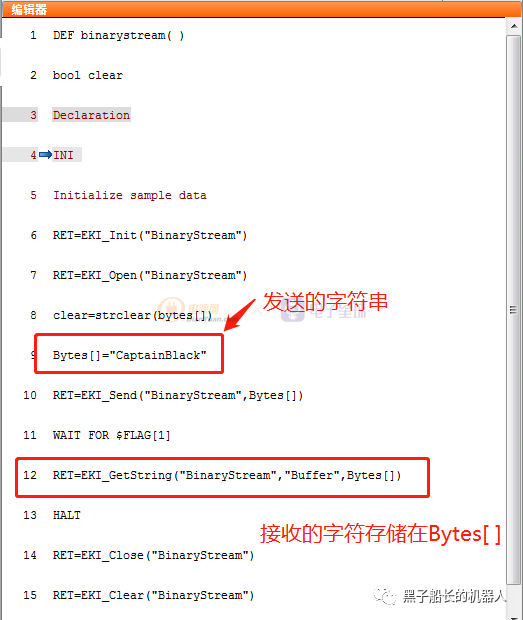
4、注意字符串的发送和接收有回车换行的标记符
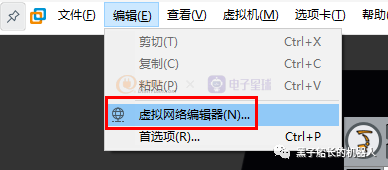
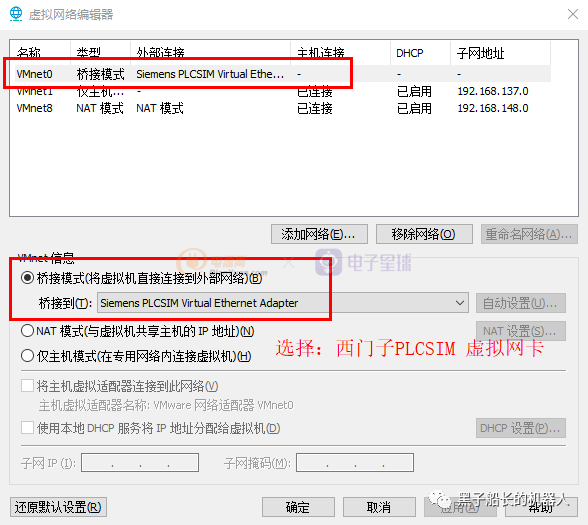
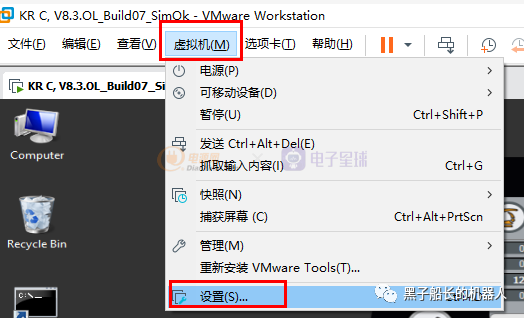
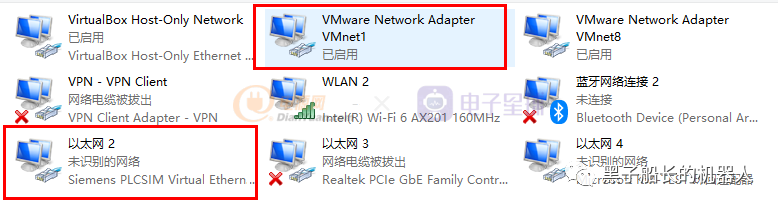
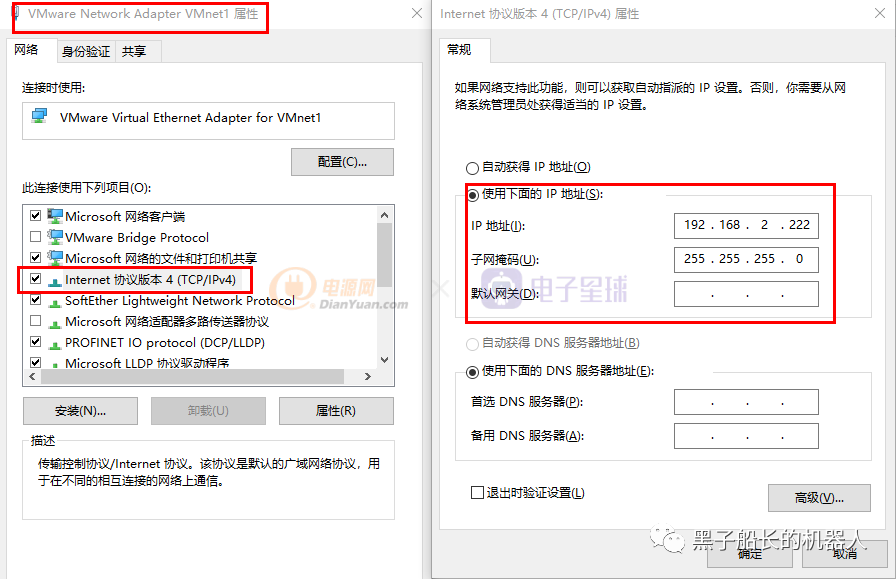
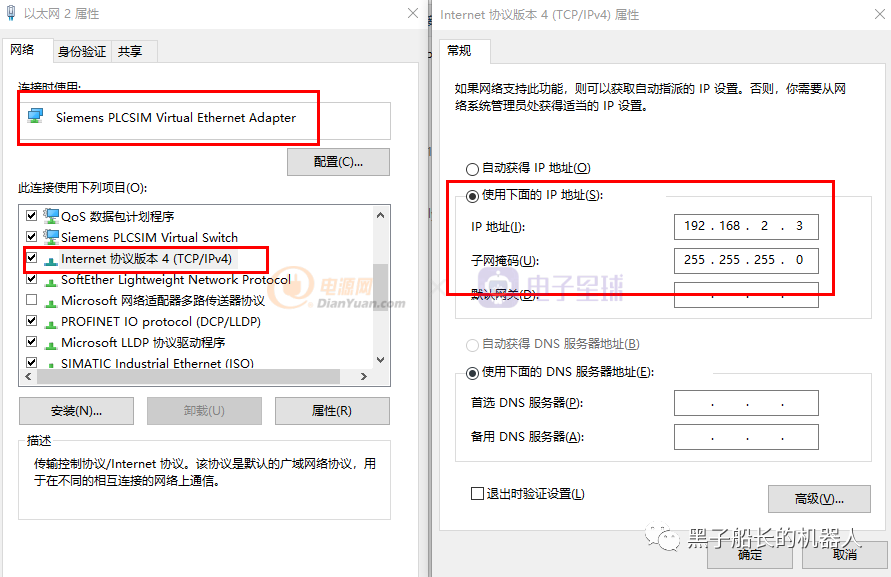
五、VMware虚拟机网路设置(很重要)
1、为了能使虚拟机和主机以及和S7-PLCSIM Advaced V3.0之间进行通讯,需要进行如下设置:
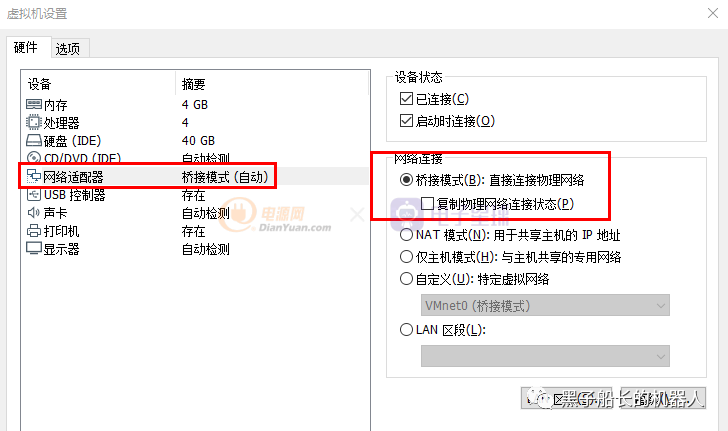
2、主机的各网卡的地址设定,保持和PLC的IP地址在同一网段内。
总结:大概步骤和流程比较简单,仅供参考学习,如有不妥之处,还请各位指正。