

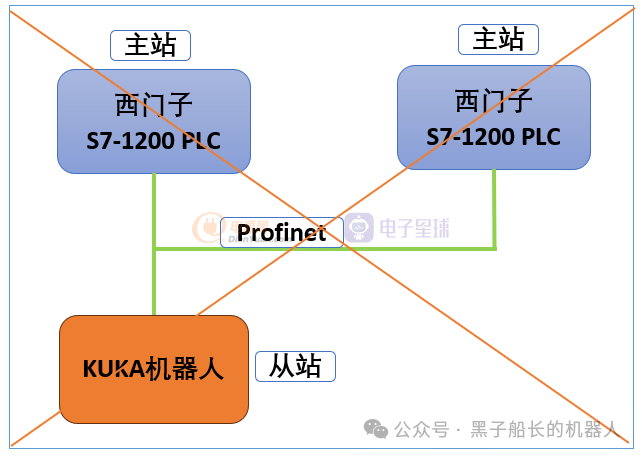
同样基于项目需求,一台KUKA机器人需要同时和两台西门子S7-1200做Profinet通讯:
情况1:KUKA机器人作为从站,两台西门子S7-1200同时作为主站,这种方式肯定不行,因为在Profinet网络中,一台设备不能同时作为两台设备的从站设备。
情况2:KUKA机器人作为一台西门子S7-1200的PN从站,同时将另一台西门子S7-1200操作模式设置为智能IO设备,作为KUKA机器人PN从站。
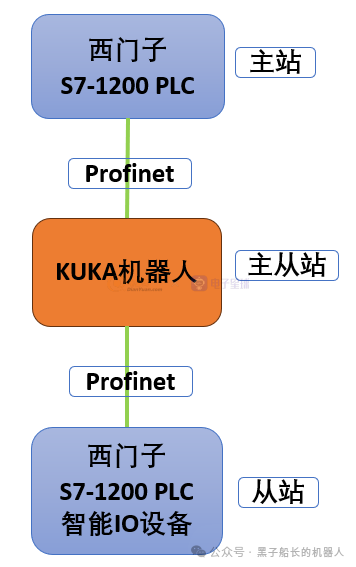
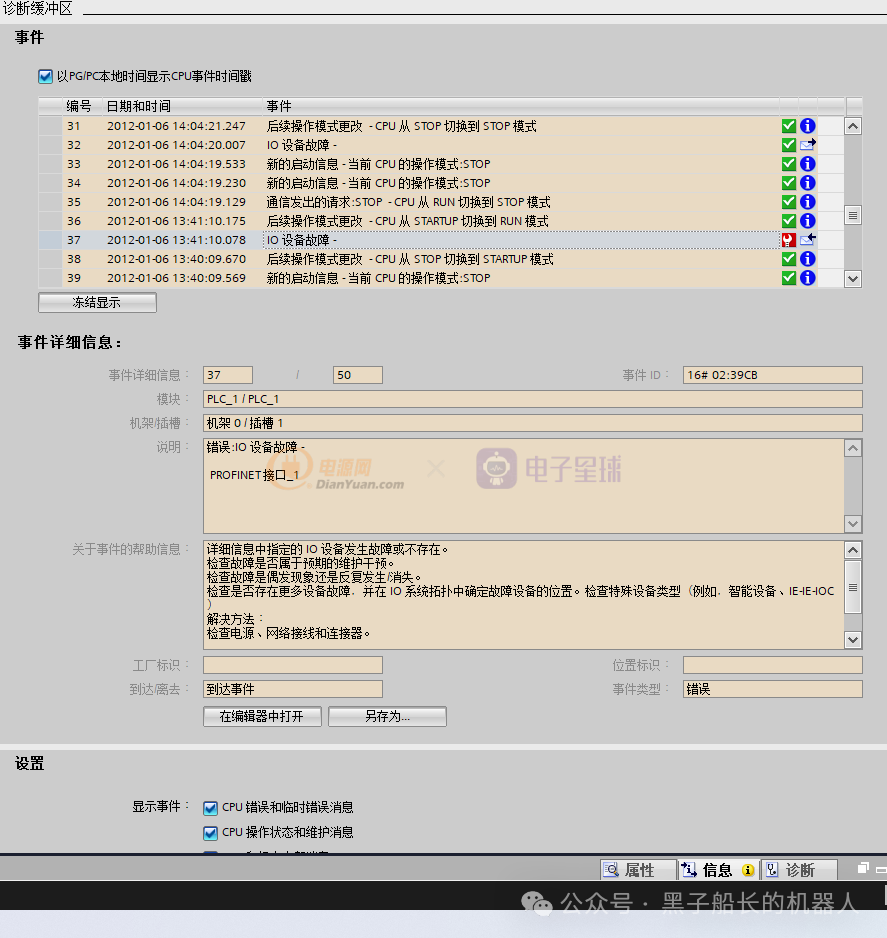
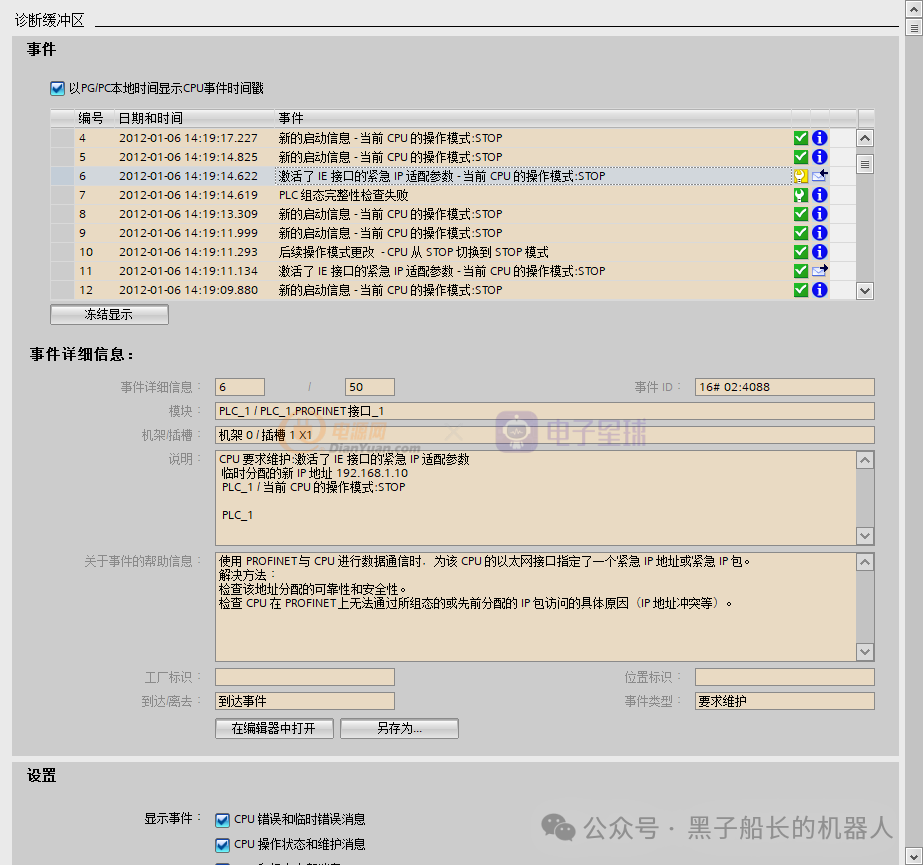
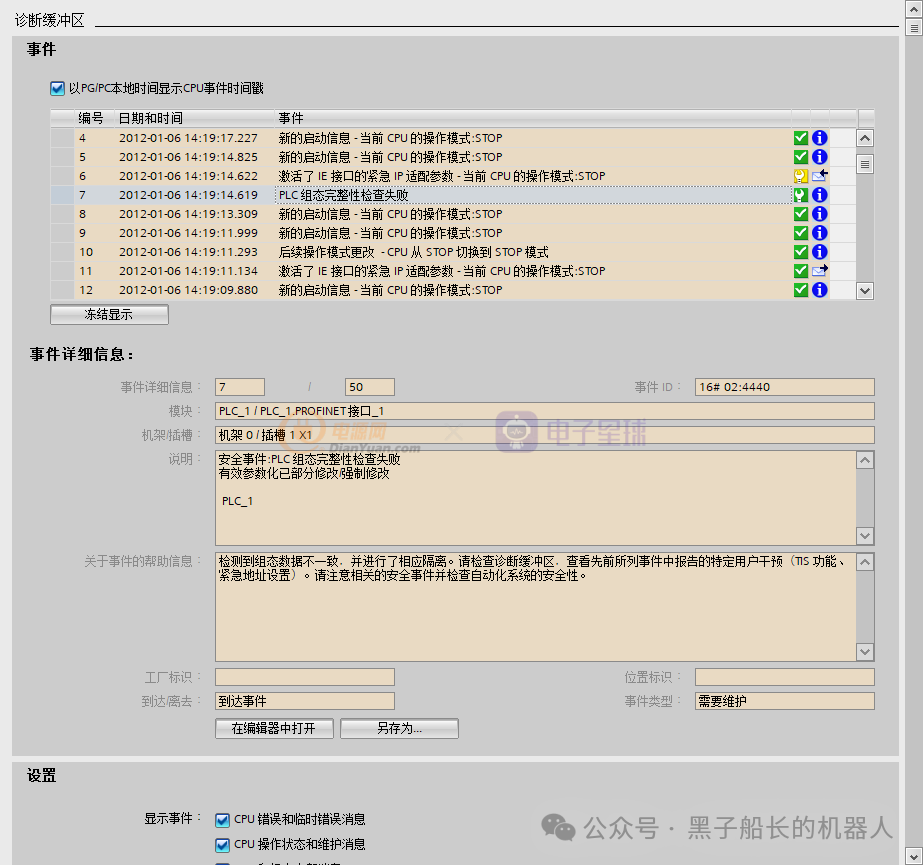
此方法理论上是可以的,但是西门子S7-1200操作模式设置为智能IO设备,作为KUKA机器人PN从站时,确实可以通讯上,但是机器人或西门子S7-1200任何一方断电重启后,就再也无法恢复通讯,PLC端智能重新配置再下载配置,咨询过很多大佬,得到的答复是理论上可以的,但是实际不知道究竟哪里问题,下面有测试是的故障照片,还请各位船员有知道的给予指导,此情况搁置中,暂时放弃。
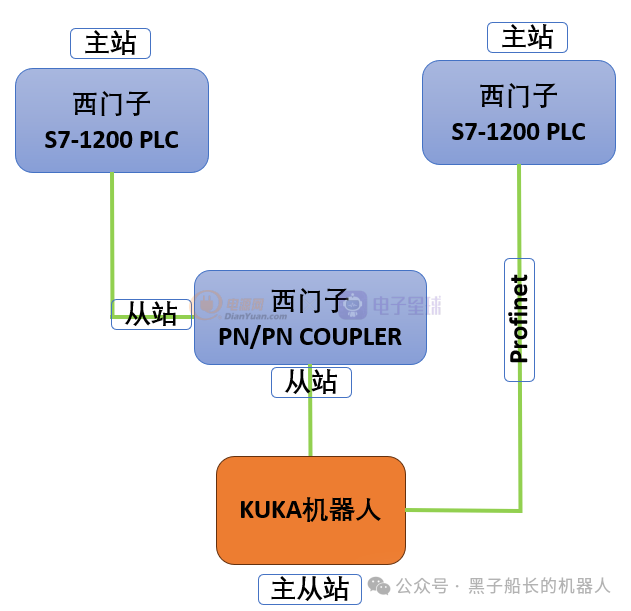
情况3:借助西门子 PN/PN COUPLER偶合器,网络结构看图理解,后面会有文章进行具体配置说明,此方法需要增加PN/PN COUPLER偶合器硬件支持。

情况4:采用两种通讯方式,KUKA机器人和一台西门子S7-1200进行Profinet通讯,和另一台西门子S7-1200进行Ethernet IP通讯。当然一台KUKA机器人可以和一台西门子S7-1200同时进行Profinet和Ethernet IP通讯。
