基于状态观测器的逆变器数字双环控制技术研究
基于状态观测器的逆变器数字双环控制技术研究
郭卫农,陈坚
(华中科技大学电力系 湖北 武汉 430074)
摘 要:该文首先比较了逆变器模型与直流电机模型的相似性,提出逆变器的控制可以借鉴直流电机的双闭环控制方法.然后针对输出电压的交叉反馈作用,采用了控制对象的解耦,消除了输出电压对内环的影响,简化了问题.数字控制具有很多优点,但是它引入的采样延时和计算延时对系统的性能影响很大.为了提高控制的实时性和鲁棒性,建立了基于改进z变换的状态观测器和扰动观测器,合理设计其极点,可以得到无差拍观测器,并在此基础上实现内环电容电流的无差拍控制.考虑内环的快速性,外环可以采用简单的比例调节器,从而整个数字双环控制系统的设计非常简单.最后,实验证明这种方法可以保证良好的静态和动态性能,在非线性负载下,也能得到良好的输出电压波形.
关键词:双环控制;状态观测器;改进z变换
1 引言
逆变电源(图1)在空载时由于LC滤波器阻尼小,容易产生振荡,采用输出电压反馈很难获得良好的动态性能和静态性能.为了满足高性能指标,出现了很多控制方案,如电压瞬时值反馈控制、无差拍控制和重复控制等.随着数字技术的发展,采用状态观测技术,使数字双环控制克服了实时性的难题,达到了模拟双环控制的效果.

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154912498.jpg');}" onmousewheel="return imgzoom(this);">
2 数学模型
直流电机是一个二阶系统,其等效控制框图(恒定励磁条件下)如图2,其中La为定子等效电感,ra为定子等效电阻,Km、Ke分别为转矩常数和电势常数,J为转子转动惯量, Tl为负载转矩, bp为转子摩擦系数.当Ke=Km=1,bp=0时,则直流电机模型与LC滤波器模型(图3)结构完全相同.因此LC滤波器可以等效为直流电机,滤波电容则类似于转子转动惯量,滤波电感电流类似于电机的输出转矩,逆变器负载电流则类似于电机的负载转矩.所以逆变器系统可以借鉴直流调速的双环控制方法.从逆变器系统的功能来说,它应该是一个随动系统,既要保证被控量准确无误的跟随给定,又要保证优良的抗扰动性能,而且在很多情况下,这些扰动是瞬态的冲击变化.因此,逆变器控制系统的设计更加复杂.
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154912498.jpg');}" onmousewheel="return imgzoom(this);">

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154912270.jpg');}" onmousewheel="return imgzoom(this);">
3 双环系统的设计[1]
3.1 输出交叉反馈解耦[2,3]
直流伺服系统电流环单独设计首先遇到的问题是反电动势产生的交叉反馈作用,它是转速环输出量对电流环的影响.在设计内环时,由于实际系统的电磁时间常数一般远远小于机电时间常数,因此电流的调节过程往往比转速的变化快得多.也就是说,反电动势对电流环来说只是一个缓慢的扰动作用,在电流调节器的调节过程中可以近似认为反电动势保持不变.
而对滤波器而言,从数量级来说,通常L要大于C ,因此输出电压对内环的影响是不能忽略的.所以,要实现双环控制,最好首先实现控制对象的解耦,即消除输出电压产生的交叉反馈作用,从而使问题简化.
考虑系统模型如图1,建立状态方程:

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154912272.jpg');}" onmousewheel="return imgzoom(this);">

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154912774.jpg');}" onmousewheel="return imgzoom(this);">
图4是逆变器的输出交叉反馈解耦控制方框图,其中Ka=Ed/2.
令:

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154912966.jpg');}" onmousewheel="return imgzoom(this);">
这样,Il与Vc成为相互独立的状态变量.
3.2 电流内环设计[4]
图5为数字控制逆变器的结构框图,采用电容电流和输出电压反馈,电容电压前馈用来实现输出交叉解耦.控制电容电流可以得到最佳的动态输出特性.从电路的角度来看,出现负载扰动时,电感电流不能突变,只能影响电容电流,因此,电容电流反馈可以直接反映出负载电流的瞬时变化.从扰动的作用点来看,采用电容电流反馈可以将负载扰动Id包含在反馈环路的前向通道内,因此可以及时对扰动产生抑制.这种系统以电容电流作为电流内环,可以有效的增强系统的稳定性,与图4相比,由于内环反馈为电容电流,则电感等效电阻的压降无法补偿.由于电感等效电阻很小,因此对系统性能影响可以忽略.D(z) 、E(z)是相应的电流环、电压环控制器.F(s)为采样延时,其时间延迟Td可以表示为

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154913119.jpg');}" onmousewheel="return imgzoom(this);">;PWM逆变器可表示为零阶保持器

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154913158.jpg');}" onmousewheel="return imgzoom(this);">和比例调节Ka=Ed/2的组合.
数字控制由于采样延时和计算延时的存在,截止频率比模拟系统要低一些,所以通常从控制效果来说,数字控制的实时性比模拟控制差一些.从控制理论而言,若系统存在延时环节,则无法实现无差拍控制.为补偿采样延迟和算法延迟,提高内环响应的速度,可以在内环中增加电流观测器和扰动观测器.电流观测器预测电容电流,补偿时间延迟,从而获得快速的电流控制响应.扰动观测器可以预估包括负载电流、系统参数变化以及其它一切扰动的综合作用,只要设计合理,就能保证系统的鲁棒性.

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154913759.jpg');}" onmousewheel="return imgzoom(this);">
内环电容电流采样时序示意图如图6.Tsi为采样周期,Td为延时,设标准采样点表示为ic(n) ,下一标准采样点表示为ic(n+1),在两个标准采样点之间表示为ic(n,m).m是滞后时间系数,时间滞后Td表示为(1-m)T.若Td=0,则m=1;若Td=T,则m=0.那么,可以利用改进z变换进行内环设计[5].

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154913150.jpg');}" onmousewheel="return imgzoom(this);">
内环开环传函为:

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154913456.jpg');}" onmousewheel="return imgzoom(this);">
利用电容电流状态观测器可以补偿时间滞后.利用上式可以得到如下方程(Kb=Ka/L ):

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154913157.jpg');}" onmousewheel="return imgzoom(this);">
令电流扰动为零,根据式(6)建立状态观测器:

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154913339.jpg');}" onmousewheel="return imgzoom(this);">
当补偿器D(z) 等于1/KbTsi时,就实现了无差拍电流控制.当然,由于没有考虑扰动,这种方法还无法实现精确的电流控制,因为观测器无法准确预测出采样时刻n的精确值,除非id=0.
假设id包括任何扰动,如负载电流变化和参数变化等.如果已知这种扰动的大小,就可以通过前馈环节进行补偿[6].当然,这种扰动是无法测量的,但是利用扰动观测器来得到id的估计值.将扰动观测器定义为一个2阶系统,其状态变量为x(n)=(ir(n),id(n))T,输出的电容电流为:ic(n,m).设可得状态方程:

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154914566.jpg');}" onmousewheel="return imgzoom(this);">

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154914533.jpg');}" onmousewheel="return imgzoom(this);">

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154914490.jpg');}" onmousewheel="return imgzoom(this);">
态观测增益向量;为观测器的时延系数,m

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154914557.jpg');}" onmousewheel="return imgzoom(this);">n与m是相互独立的,即mn可以不等于m.
由式(12)可得:

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154914466.jpg');}" onmousewheel="return imgzoom(this);">
利用这个状态观测器可以对扰动进行补偿.从其特征方程可知,当l1=0,l2=1时,则有:

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154914472.jpg');}" onmousewheel="return imgzoom(this);">
根据前面所述,电流环包括2个无差拍观测器和1个无差拍控制器.系统的稳定性由电流观测器保证;系统鲁棒性由扰动观测器来保证.合理选择观测器参数,可以将观测器对系统的影响减小到可以接受的程度.从式(10)可知,无差拍控制器事实上就是一个比例环节.由于整个内环实现的控制策略相当简单,因此可以实现较高频率的电流采样.根据香农定理,电流采样频率是开关频率的2倍即可.
3.3 电压外环的设计
根据上节分析,由于内环的截止频率高于外环的截止频率,因此在分析外环时电流内环可以近似等效为一个连续环节.由于电流内环已经抑制了各种扰动,所以在设计控制器E(z)时,只需考虑电压指令的响应.E(z)可以采用比例补偿.图8是系统闭环时的幅频响应和相频响应,其中(a)是空载,(b)是满载.从图可知,无论空载还是满载,在没有波形畸变的条件下,输出电压的有效值与给定几乎相同,因为在W=314处的幅值增益分别为0.0025dB和-0.005dB;但是相位误差分别为-1°和-3°.
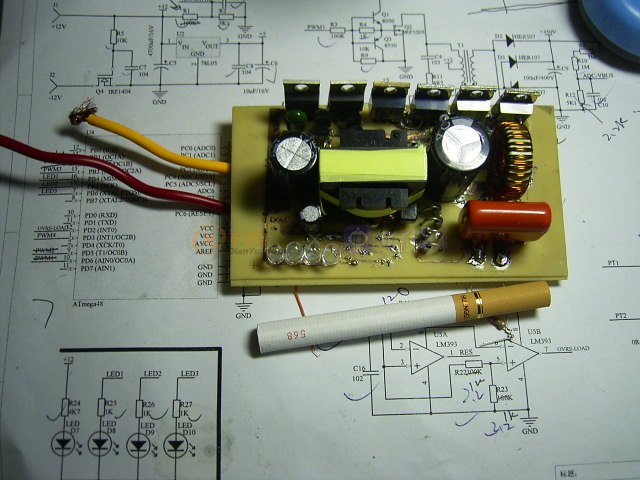
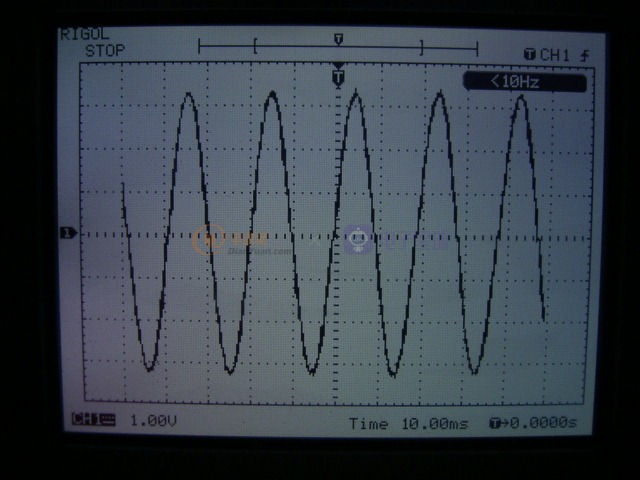
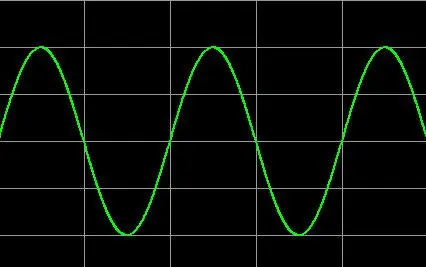
4 实验结果与分析
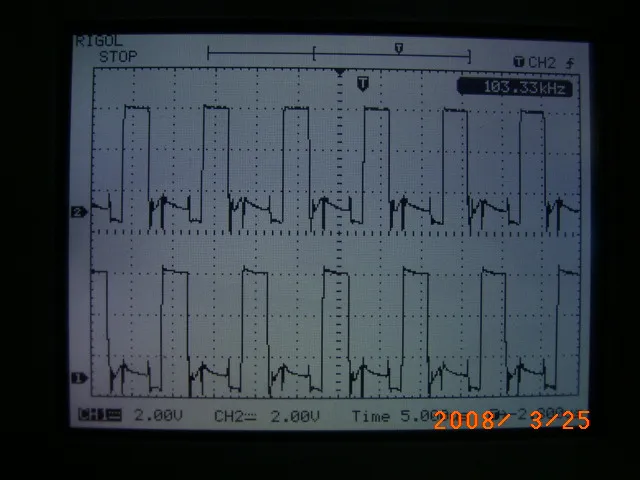
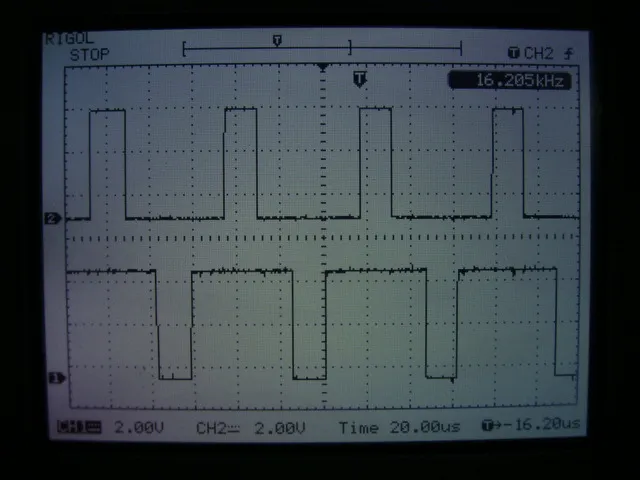
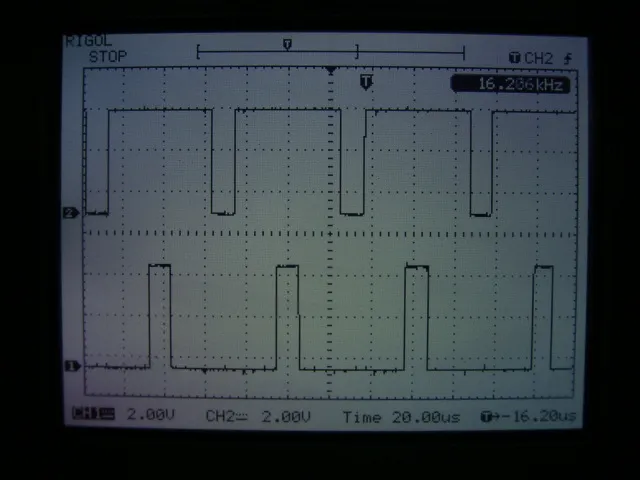
为验证上述理论分析,采用DSP TMS320F240控制一半桥逆变器,得到如下结果.图9为 数字双环控制带载的输出电压和电流波形,逆变器输出电压的波形与基波的比值较低,约为1%.图10为突加负载的输出电压和电流波形,从图可知,突加负载时,输出电压在1~2ms就可以恢复正常,系统的动态响应速度很快.图11为带整流负载的输出电压电流波形及各次电压谐波含量,其与基波的比值约为1.5%.带整流负载后,逆变器输出波形谐波含量增加,但是采用双环控制可以在很大程度上抑制谐波.

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154914983.jpg');}" onmousewheel="return imgzoom(this);">

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154914412.jpg');}" onmousewheel="return imgzoom(this);">

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154914659.jpg');}" onmousewheel="return imgzoom(this);">
5 结论
双环控制是双环控制是目前控制效果最佳的方法之一.它不仅具有良好的动态性能,还具有良好的稳态性能.无论线性负载,还是非线性负载,都能很好的满足要求.

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154914819.jpg');}" onmousewheel="return imgzoom(this);">

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154914573.jpg');}" onmousewheel="return imgzoom(this);">

500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.comhttp://www.52data.cn/fdzl/UploadFiles_4027/200605/2006518154915849.jpg');}" onmousewheel="return imgzoom(this);">



 500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/2045691207370336.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/2045691207370336.jpg');}" onmousewheel="return imgzoom(this);"> 500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/371451207405754.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/371451207405754.jpg');}" onmousewheel="return imgzoom(this);">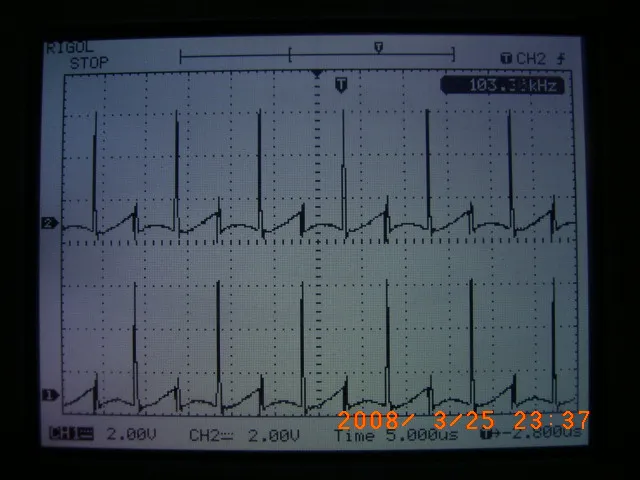 500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/2045691207580322.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/2045691207580322.jpg');}" onmousewheel="return imgzoom(this);">
 500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/2045691207580699.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/2045691207580699.jpg');}" onmousewheel="return imgzoom(this);">
 500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/2045691207580839.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/2045691207580839.jpg');}" onmousewheel="return imgzoom(this);">
 500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/2045691208190754.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/2045691208190754.jpg');}" onmousewheel="return imgzoom(this);">
 500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/2045691208190786.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='这是一张缩略图,点击可放大。\n按住CTRL,滚动鼠标滚轮可自由缩放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/64/2045691208190786.jpg');}" onmousewheel="return imgzoom(this);">
