环路补偿参数设计_Buck.xls (excel文件)
环路补偿参数设计.rar (Mathcad文件)
buck_type23.rar (Saber文件)
参数没有做说明,只是试着去看些
用一个极点,一个零点IP1Z 的 TYPE II 去补偿 双极点s^2的控制输出,补偿的增益中必定有s^2的关系
你的上面没有这种关系
//---------------------------------------------------------------------------------------------------------------------
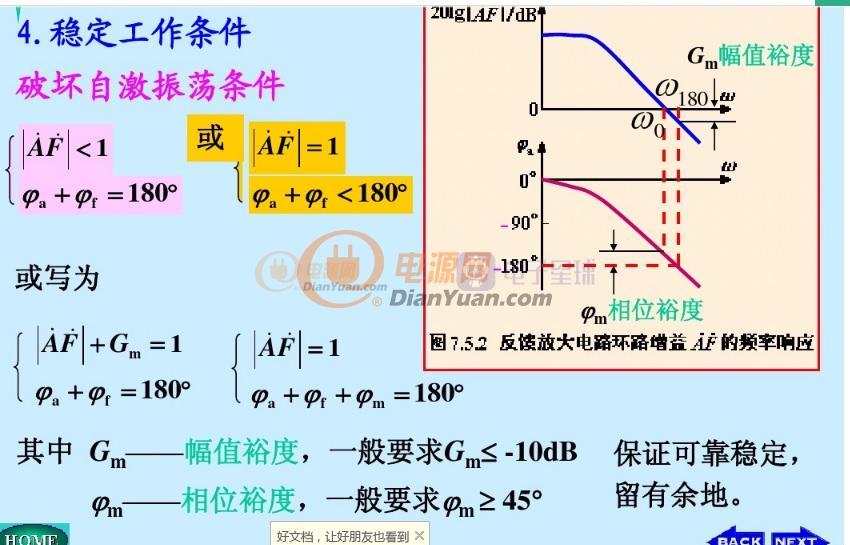
说说我对环路补偿的理解吧
环路了补偿跟所有的放大器补偿是一样,目的只有一个是放大器稳定
工程计算的方法通常是以BODE图去做研究的
通过传递函数是去找出函数变化发生转折的点(叫拐点可能跟函数的里面的拐点不一样的意义,
函数的拐点是凹凸性发生改变的点),这个转折点就是零点和极点
而不是通过去解传递函数的方程的方法
这样所有的计算就相当于做加减乘除法了,环路其实很简单的
一个极点相当于一个RC积分器
相位偏移 θ = - arctan( ω / ωp ) , ωp为极点频率
增益是G = -20 lg ( ω / ωp)
同样零点相当于一个RC微分器
寻着这个思路,上面的所有计算都是很容易的
在以-1斜率的低频率段,通过提高低频段的增益,就相当于提高了相位的边界 PM
这个增益补偿完了,再反过来可以验证下就可以了,就像磁芯饱和的计算一样的。
计算不是环路的补偿的难点,难点是因为在补偿环路有很多分布参数的影响,造成相移
这个很难控制,所以才有上面提高相位的边界PM值。
其实环路补偿是很简单,真的是很简单,特别是TYPE III型补偿更简单,
增加了电路零件,而补偿变得更容易了。
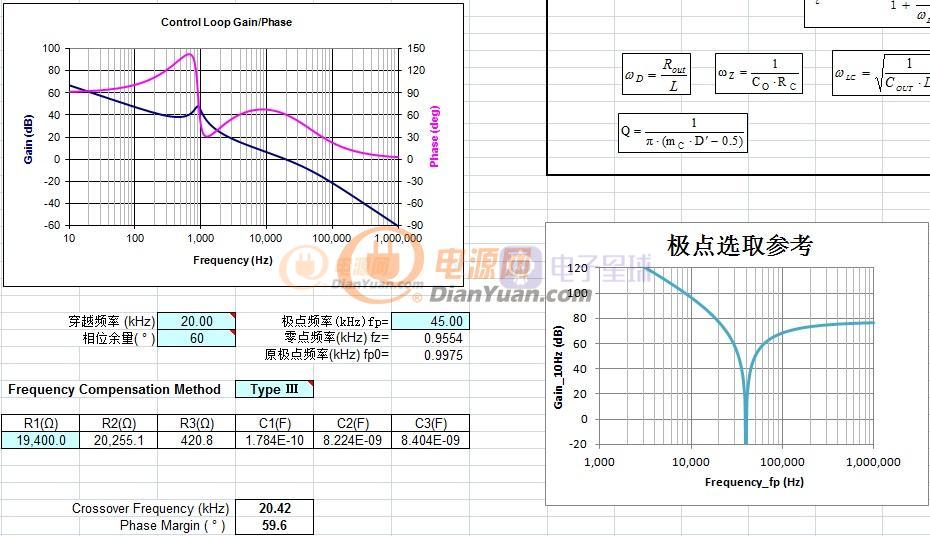
按这种方法设置后的总开环bode图如下:
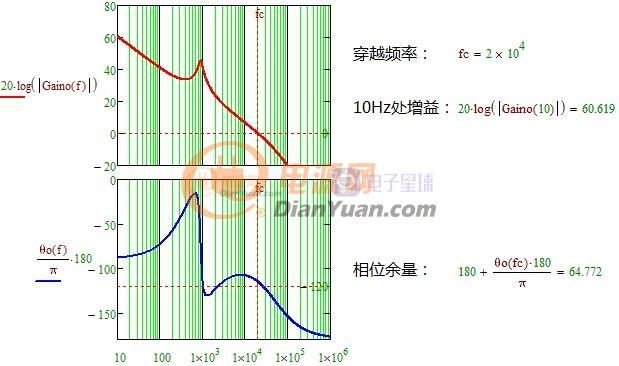
将穿越频率设置成预期的20kHz,10Hz处增益60.619dB,相位余量64.772度,低频增益和相位余量都没有达到预期值。(如果将相位余量设置为60度,穿越频率就不是20kHz了)
如果期望在20kHz穿越频率处的相位余量是50度,采用这种方法得到的结果依然是64.772度,这种方法跟K-factor法相似虽然设置相对简单但结果只能是固定的一种(无法得到最优参数)。
低频增益和相位余量都没有达到预期值
这个低频的增益,可以调整第一、二个零点的增益
也就是EA反馈电阻R2/R1的比值
通过补偿后,BODE图应该是闭环的增益BODE,相位BODE图
Gc(s) = Go(s) / [ 1 + Go(s) * F(s) ]
Go(s) 开环增益,Gc(s) 闭环增益, F(s) 环路补偿
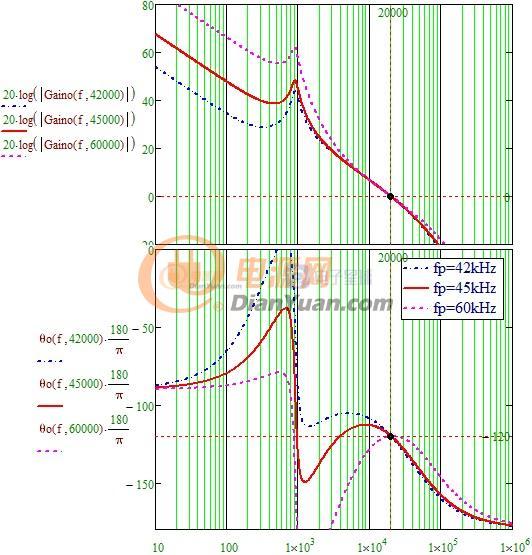
调零点增益(我的理解是调原极点)可以改变低频增益同时穿越频率也会跟着改变,如果期望二者都达到预期值还需重新设置零点、极点的位置。
环路补偿中的参数一般都是改一个而关联影响好几个所以在设置上会有些麻烦,如果采用试凑法在bode图上移动零、极点也能得出差不多的结果不过需要一点经验和了解一些规律。
一楼附件中的方法就是普通解方程的方法,将所有的变量关联起来(消元)最终只剩下少量几个未知量,上述设计方法中是以极点频率fp为待设变量的。
另这个补偿后的图是开环bode图既Go(s)。